1.本实用新型涉及轨枕吊具技术领域,具体为一种轨排螺栓自动紧固装置。
背景技术:
2.城市轨道交通铺轨项目基地轨排组装扣配件紧固施工中,在现场施工环节,现有技术是采用传统人工进行扣配件安装及紧固,将铁垫板、轨下垫板、轨距块等安装完毕后,大螺栓就位,采用人工扳手紧固或电动扳手紧固,在扣配件安装和无缝线路锁定过程中,人工紧固常有扭矩不达标的情况,所以一种轨排螺栓自动紧固装置显得尤为重要。
3.目前的轨排拼装都是在铺轨基地进行,交叉作业施工影响大,拼装工效和质量得不到保障,轨排送至地下作业面后,轨排轨枕方正工作量大,难度大,直接影响施工工期,针对上述情况,我们推出了一种轨排螺栓自动紧固装置。
技术实现要素:
4.本实用新型的目的在于提供一种轨排螺栓自动紧固装置,以解决上述背景技术中提出一般的新型轨排螺栓自动紧固装置,其轨排拼装都是在铺轨基地进行,交叉作业施工影响大,拼装工效和质量得不到保障,轨排送至地下作业面后,轨排轨枕方正工作量大,难度大,直接影响施工工期的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种轨排螺栓自动紧固装置,包括行走机构和液压系统,所述行走机构下表面固定有连接杆,且连接杆下端设置有保护罩,所述保护罩内壁连接有行走轮,且保护罩外壁安置有反锁插销,所述行走机构下表面设置有紧固机械手臂,且紧固机械手臂通过可动螺栓与行走机构相连接,所述可动螺栓位于行走机构外壁,所述右方紧固机械手臂外壁设置有视觉传感器,且紧固机械手臂下端连接有液压伸缩杆,所述液压伸缩杆下端连接有仿形手臂端,所述左方紧固机械手臂外壁设置有距离传感器,所述液压系统设置于行走机构上表面中部,且液压系统右方设置有传动系统,所述传动系统外侧四角均焊接有加固螺栓,所述行走机构上表面安置有手动握把,且行走机构上表面靠近传动系统的一方安置有控制系统。
6.优选的,所述保护罩与行走轮之间为活动连接,且行走轮呈钢轨仿形。
7.优选的,所述紧固机械手臂通过可动螺栓与行走机构之间构成活动结构,且紧固机械手臂关于行走机构的竖直中心线呈对称分布。
8.优选的,所述仿形手臂端通过液压伸缩杆与紧固机械手臂之间构成伸缩结构,且紧固机械手臂与可动螺栓之间的连接方式为铰接。
9.优选的,所述液压系统与行走机构之间呈垂直分布,且液压系统与行走机构之间的连接方式为焊接。
10.优选的,所述传动系统通过加固螺栓与行走机构之间构成固定结构,且加固螺栓设置有四个。
11.与现有技术相比,本实用新型的有益效果是:该新型轨排螺栓自动紧固装置解决
了铺轨基地轨排拼装慢、扭矩不达标的问题,保障扣配件安装质量,该装置自动化程度高、方便实用,极大地增加了施工效益,且该装置具备自动走行及紧固功能,节省劳动力投入,大幅提升了轨排拼装和无缝线路锁定效率,加快施工进度,并且该装置可通过视觉传感器和距离传感器对扣件类型进行识别,在提高精度的前提下,确保了施工中不对扣配件造成损伤,给项目带来了一定的经济效益,同时提高了轨道铺装的智能化水平;
12.该新型轨排螺栓自动紧固装置,利用控制系统的智能助力进行转向,自动选择位置,对动手偏差进行纠偏,确保设备稳定转向,不再重新布置重启设备,且减少人员劳动力,在曲线坡度大于%地段,尤其是出入段线及高架桥地段,利用抱死及辅助轮反作用,设置防滑控制系统,加强摩擦力,必须时铁鞋分段设置,避免溜车发生安全事故;
13.该新型轨排螺栓自动紧固装置,机械手臂紧固端通过两侧传感器对初始位置和地段进行识别,将初探里程和道床类型输入控制系统,带动液压伸缩杆调整紧固端位置,通过多自由度的可动螺栓旋转端头,对大螺栓扶正就位并紧固,当扭矩达到设计标准后,液压伸缩杆抬起,沿线路方向前进当前里程单位枕距,再次识别进行紧固,依次对全线扣配件或整个轨排的扣配件进行紧固;
14.该新型轨排螺栓自动紧固装置,走行机构设置有手动握把,可人工选择进行紧固调轨,保护罩防止人员走动时触碰行走轮,造成人员伤害,仿形轮采用硬度低且较为光滑的表面,防止对钢轨轨面造成擦伤,反锁插销对走行轨进行固定,防止运行过程中,走行过快或行走轮脱落。
附图说明
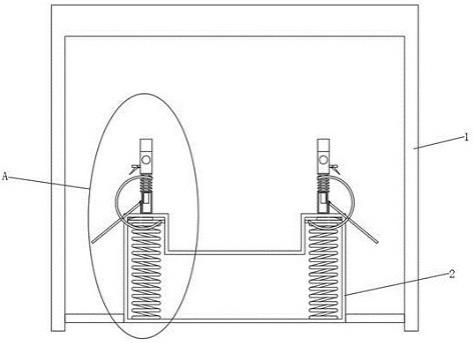
15.图1为本实用新型主视结构示意图;
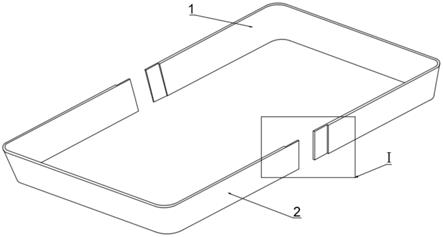
16.图2为本实用新型俯视结构示意图;
17.图3为本实用新型侧视结构示意图。
18.图4为本实用新型紧固机械手臂结构示意图。
19.图中:1、行走机构;2、连接杆;3、保护罩;4、行走轮;5、反锁插销;6、紧固机械手臂;7、可动螺栓;8、视觉传感器;9、液压伸缩杆;10、仿形手臂端;11、距离传感器;12、液压系统;13、传动系统;14、加固螺栓;15、手动握把;16、控制系统。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.请参阅图1
‑
4,本实用新型提供技术方案:一种轨排螺栓自动紧固装置,包括行走机构1和液压系统12,行走机构1下表面固定有连接杆2,且连接杆2下端设置有保护罩3,保护罩3内壁连接有行走轮4,且保护罩3外壁安置有反锁插销5,行走机构1下表面设置有紧固机械手臂6,且紧固机械手臂6通过可动螺栓7与行走机构1相连接,可动螺栓7位于行走机构1外壁,右方紧固机械手臂6外壁设置有视觉传感器8,且紧固机械手臂6下端连接有液压伸缩杆9,液压伸缩杆9下端连接有仿形手臂端10,左方紧固机械手臂6外壁设置有距离传感器
11,保护罩3与行走轮4之间为活动连接,且行走轮4呈钢轨仿形,紧固机械手臂6通过可动螺栓7与行走机构1之间构成活动结构,且紧固机械手臂6关于行走机构1的竖直中心线呈对称分布,仿形手臂端10通过液压伸缩杆9与紧固机械手臂6之间构成伸缩结构,且紧固机械手臂6与可动螺栓7之间的连接方式为铰接,呈钢轨仿形状的行走轮4可与钢轨进行贴合并带动紧固装置进行轨迹移动,且行走机构1下方的仿形手臂端10可通过液压伸缩杆9的伸缩来进行位置和距离的初步调整,并配合可动螺栓7进行角度的进一步调节,从而接触大螺栓并对其进行紧固工作,而紧固机械手臂6外壁设置的视觉传感器8和距离传感器11可对进行大螺栓识别和定位,以保证紧固工作的精确性;
22.液压系统12设置于行走机构1上表面中部,且液压系统12右方设置有传动系统13,传动系统13外侧四角均焊接有加固螺栓14,行走机构1上表面安置有手动握把15,且行走机构1上表面靠近传动系统13的一方安置有控制系统16,液压系统12与行走机构1之间呈垂直分布,且液压系统12与行走机构1之间的连接方式为焊接传动系统13通过加固螺栓14与行走机构1之间构成固定结构,且加固螺栓14设置有四个,设置的液压系统12可控制液压伸缩杆9的伸缩间距,且控制系统16可配合传感器对初始位置和地段进行识别,将初探里程和道床类型输入控制系统16,并控制仿形手臂端10来进行相应扭力及扭矩的紧固工作,而传动系统13可控制行走轮4进行准确位置的移动,手动握把15的设置可使人工进行紧固调轨。
23.工作原理:在使用该轨排螺栓自动紧固装置时,首先在铺轨基地已硬化场地轨排拼装区或焊轨完成的区间车站,将铁垫板、轨下垫板轨距块等安装完毕后,对紧固装置进行整机定位,通过控制系统16可配合传感器对初始位置和地段进行识别,将初探里程和道床类型输入控制系统16,然后传动系统13可控制行走轮4进行准确位置的移动,并且距离传感器11和视觉传感器8可进行大螺栓识别和定位,随即液压系统12带动液压伸缩杆9对紧固端进行位置和距离的初步调整,对螺栓进行紧固,紧接着抬起液压伸缩杆9,并通过传动系统13带动行走轮4沿钢轨方向走行,达到下一个扣件位置时,再次调整液压伸缩杆9进行大螺栓紧固,依次对全线或整个轨排的扣配件进行紧固。
24.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。