利用球标记确定自旋测量值的系统和方法
1.发明人:弗雷德里克
·
塔克森,尼古拉
·
彼得
·
赫曼森和托马斯
·
哈里斯
·
哈塞尔巴奇
2.请求优先权
3.本技术请求对2019年7月11日提交的序列号为62/873,105的美国临时专利申请、2019年10月10日提交的序列号为62/913,523的美国临时专利申请和2020年2月5日提交的序列号为62/970,394的美国临时专利申请的优先权。将上述申请的所有文件通过引用并入本文。
技术领域
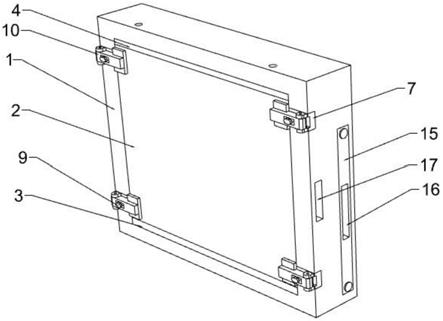
4.本发明涉及一种用于确定具有反射标记的运动球的自旋特性的系统和方法。
背景技术:
5.自旋参数,例如运动用球的自旋速度和自旋轴的方向,对于跟踪运动用球、模拟运动用球的飞行以及开发运动器材,例如运动球、球杆、铁杆、球拍、球棒或用于发射运动球的类似物品很有帮助。可以基于与自旋球相对应的雷达数据中的特征来做出这样的确定。
6.美国专利no
.
8,845,442公开了一种通过分析飞行中自旋球的多普勒雷达信号的调制来确定运动球的自旋速率的方法。但是,使用这种方法的调制信号相对较弱。在只有很短的球飞行数据的情况下,例如在室内高尔夫设置中,未标记球的调制信号往往太弱而无法用于自旋速率测量。
7.为了在这些情况下放大调制信号并使自旋检测成为可能,可以在球上放置反射标记。然而,为了生成有用的数据,现有系统通常需要在发射球之前精确地定向反射标记,并且在许多情况下,系统需要对标记模式有精确的先验知识。例如,标记物在飞行过程中可能被要求直接面对雷达装置的方向。对于球的这些方向限制可能会妨碍系统的用户友好性,并且当球以不同于预期的方式发射时,可能无法生成有用的球轨迹数据。
8.当前的实施方式描述了一种用于确定球的自旋特性的方法和装置,例如自旋速率和自旋轴的方向,通过以这样的方式在球上应用具有特定定位要求的对比区域,使得无论自旋轴的方向和雷达天线的位置如何,无论球的方向如何,并且无需了解对比区域的特定定位几何形状的情况下,就可以从对接收到的雷达信号的调制中确定自旋特性。
技术实现要素:
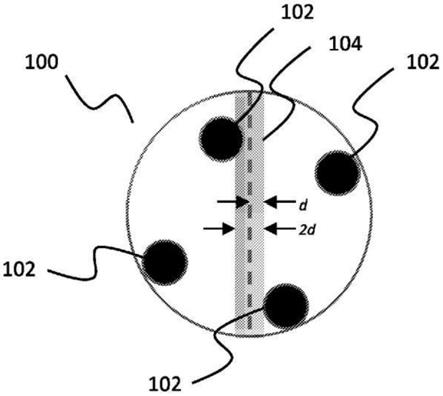
9.本发明涉及一种运动球,其被配置为增强雷达对自旋特性的检测。该球包括球体,所述球体对于由雷达产生的用于检测所述球的自旋的辐射具有第一反射率;以及多个标记,每个所述标记相对于由雷达产生的用于检测所述球的自旋的辐射具有第二反射率,所述第二反射率不同于所述第一反射率。所述标记分布在所述球上,使得围绕所述球的外表面延伸的每个大圆都在至少一个标记在所述球的外表面上的投影的距离d之内。所述距离d小于所述球的半径。
10.在一个实施方式中,所述标记是圆形的,并且每个所述标记在所述球的外表面上的投影包括从所述球的中心延伸到包围所述标记的球的外表面的锥体。
11.在一个实施方式中,所述标记中的至少一个是嵌入所述运动球内的平面圆盘。
12.在一个实施方式中,所述标记中的至少一个是所述球内由圆圈圈出的球面的一部分,该球面具有与所述球相同的中心。
13.在一个实施方式中,所述标记是矩形的,并且每个标记在所述球的外表面上的投影包括从所述球的中心延伸到包围所述标记的球的外表面的棱锥。
14.在一个实施方式中,所述标记中的至少一个标记是嵌入所述运动球内的平面矩形。
15.在一个实施方式中,所述标记中的至少一个标记是所述球内的球面的一部分,该球面由从所述球的中心延伸到所述球的外表面的棱锥所包围。
16.在一个实施方式中,当一个以上的标记在大圆的距离d内时,所有这些标记在所述球的外表面上的投影围绕所述大圆不均匀地分布。
17.在一个实施方式中,在所述大圆中的第一个大圆的距离d内只有两个标记,这些标记彼此不完全径向相对。
18.在一个实施方式中,所述两个标记在预定公差范围内内不彼此径向相对。
19.在一个实施方式中,在所述大圆的距离d内的标记与围绕所述大圆均匀分布的位置相隔,与投影在所述大圆的距离d内的每个其他标记物在球的外表面上的投影至少间隔距离m。
20.在一个实施方式中,每个标记的径向相对位置是所述球的外表面与所述标记在所述球的外表面上的投影的径向相对的一部分,其中,每个所述标记的径向相对的位置与相应标记在所述球的外表面上的投影具有相同的大小和形状。
21.在一个实施方式中,每个所述标记的至少一部分在所述球的单个半球内延伸。
22.本发明还涉及一种运动球,其被配置为增强雷达对自旋特性的检测。所述球包括球体,所述球体对于由雷达产生的用于检测球的自旋的辐射具有第一反射率;以及在所述球内的球形层,该球形层的材料对于由雷达产生的用于检测球的自旋的辐射具有第二反射率,所述第二反射率不同于所述第一反射率,在没有所述层材料的层内形成多个标记,使得所述标记具有第一反射率。所述标记分布在所述球上,使得围绕所述球的外表面延伸的每个大圆都在至少一个标记在所述球的外表面的投影的距离d之内,所述距离d小于所述球的半径。
23.此外,本公开涉及一种用于制造运动球的方法,该运动球被配置为增强雷达对自旋特性的检测。该方法包括形成球体,所述球体对于由雷达产生的用于检测球的自旋的辐射具有第一反射率;并且在所述运动球上形成多个标记,每个所述标记相对于雷达产生的用于检测球的自旋的辐射具有第二反射率,所述第二反射率不同于所述第一反射率。所述标记分布在所述球上,使得围绕所述球的外表面延伸的每个大圆都在至少一个标记在所述球的外表面上的投影的距离d内,所述距离d小于所述球的半径。
附图说明
24.图1a示出了满足定位要求的第一标记球,其具有被画在其上的宽度2d的带围绕的
大圆;
25.图1b示出了不满足定位要求的第二标记球,其具有绘制在其上的宽度为2d的带围绕的不满足定位要求的大圆;
26.图1c示出了具有多个标记的第三标记球的俯视图,该标记与围绕相同大圆的宽度2d的带接触并满足可选的附加定位限制;
27.图1d示出了具有多个标记的第四标记球的俯视图,该标记与围绕同一大圆的宽度2d的带接触,并且不满足附加的定位限制;
28.图2a
‑
2b示出了根据本发明的一个实施方式的具有第一标记图案的标记球;
29.图3a
‑
3b示出了根据本发明的一个实施方式的具有第二标记图案的标记球;
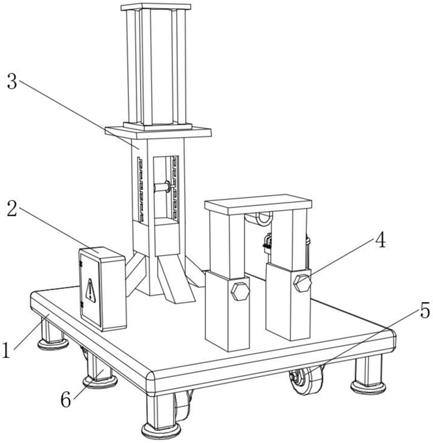
30.图4示出了根据本发明的示例性实施方式的用于确定运动球的自旋轴的系统;
31.图5示出了根据本发明的示例性实施方式的用于确定自旋高尔夫球的自旋轴的示例性方法。
具体实施方式
32.参考以下描述和相关附图可以进一步理解示例性实施方式,其中,类似的元件具有相同的附图标记。示例性实施方式涉及用于基于雷达确定运动球的自旋特性的系统和方法,其中,示例性运动球通过结合具有与球的其他区域不同的电反射率的标记来修改。反射标记提供了在球的表面(或接近表面)可以在雷达数据中检测到的对比区域。例如,在飞行轨迹测量系统中使用的雷达的频率区域中,标记可以是导电的,使得由雷达发射的微波辐射被标记反射和接收的方式与影响球的其他部分的辐射不同。下面描述了标记物的具体定位限制,其允许检测标记物,而不考虑球相对于雷达旋转的轴的方向。
33.尽管本文详述的示例性实施方式描述了具有这些标记的高尔夫球或棒球,但本领域技术人员可以理解,任何运动球或甚至与运动无关的物体都可以被标记并且以相同方式确定自旋特性。示例性实施方式可适用于任何球形或基本上类似于球形的球。例如,虽然高尔夫球通常是球形的,但是球的外表面可以包括凹痕、一条或多条接缝或其他表面不规则性,而棒球可能具有凸起的接缝。然而,出于目前的目的,这些球可以被假定为大致是球形。
34.尽管分布在球的一部分上的标记在某些情况下可能会改变球的特性(例如,球如何对与球杆的撞击做出反应),并可能改变修改后的球相对于未修改的高尔夫球的飞行特性,但本文所述的标记的影响将是最小的,因为与球相比,标记可以被做得非常薄和轻,并且对于这些示例性修改球的许多应用来说,这些影响实际上是无足轻重的,或者,如本领域技术人员所理解的那样,如果需要的话,可以在对球的飞行进行建模的过程中进行补偿。例如,在室内高尔夫环境中,被击打的球在击中屏幕之前可能仅行进了很短的距离(例如,3~4米)。对球的发射特性或飞行的任何影响在这段短距离内都是最小的,并且室内高尔夫系统可以在其计算中使用理想的高尔夫球特性结合其发射特性来预测球的路径。在另一个示例中,球可以是棒球,并且可以针对球场或击球场景确定棒球的自旋特性。
35.根据一个示例性实施方式,对球形球进行标记以满足下面详细描述的定位要求。还描述了可选的附加定位限制,以进一步提高使用效果。可以通过许多不同的标记布置(例如根据被标记的球的类型调整的),来满足该要求和可选的限制。例如,对于高尔夫球来说,标记可以包括多个相对均匀地分布在球周围的圆形标记,而对于棒球来说,标记可以与棒
球的接缝处或其一部分紧紧相连。标记的形状可以是任何方式的,但是圆形或矩形的标记可以在雷达数据中提供更清晰的信号。例如,用于高尔夫球的典型标记是直径为2~8mm的圆形,标记的关键尺寸(例如,直径或最大宽度)通常被选择为所使用的雷达的波长的0.25至0.5倍。需要注意的是,本文描述的圆形标记不一定是二维的圆,而是对应于由圆所包围的球体表面的一部分(例如,球的外表面或内球面)的三维形状。
36.类似地,被描述为矩形的标记可以是二维矩形,但也可以是形成为球体的一部分的三维形状,由具有顶点在球体中心的椎体与球体的交点界定。正如本领域技术人员所理解的,这可能取决于球的内部结构。具有球形内层的球可以在这些球形层的部分上形成标记,而具有单一核心或包括单一构件的核心的球,可以具有嵌入其中的圆形或其他形状的平面标记。在下文中,这些标记可被称为它们近似的二维形状,因为标记的精确形状并不像它们在球表面周围的分布模式那么重要。典型的圆形/矩形标记的数量可以在5~20个之间。标记在球的外表面的投影通常将覆盖球表面积的2%至25%。这可以确保,标记由于接收到的多普勒信号上的自旋而产生所需的调制信号的放大。可以使用任意数量的标记来满足定位限制。此外,虽然所描述的实施方式包括所有圆形标记或包括所有矩形标记,但是本领域技术人员会理解,球可以包含各种形状的标记的混合。
37.标记的定位要求是,从围绕球的每个大圆到最近的标记的距离必须不超过预定的最小距离d。本领域技术人员应注意,尽管d通常是正的,但也可以是负的。在d为负值的情况下,围绕球的任何大圆都将通过至少一个标记,大圆与标记相交处在大圆垂直的方向上与无标记区的距离为d。大圆(gc)是由通过球体中心点的平面与球体外部的交点定义的路径,换句话说,是球体的赤道。
38.球体具有无数个方向的大圆,每个方向具有与球相同的直径。因此,无论球围绕什么轴自旋,球的大圆之一都将定义一个平面,球在该平面内自旋。通过确保在每个大圆的规定的最小距离内至少有一个标记,根据本发明的球,无论球的自旋轴的方向如何,都确保由至少一个标记产生的振荡信号将在反射的雷达信号中被检测到。因此,根据定位要求,标记的定位必须使任何大圆都不可能投射到不在至少一个标记的距离d之内的球上。在一些实施方式中,距离d可以是零或负值,即,每个可能的大圆都会命中至少一个标记。d为零或负值通常将增强多普勒信号由于球的自旋而产生的调制。这在球飞行时间非常短的情况下可能是有利的,例如,在模拟器环境中,高尔夫球击中网或屏幕。然而,对于不同的球,距离d可能有所不同。
39.通常,距离d明显小于球的直径,例如,大约为球直径的0到1/5的数量级。从另一个角度考虑,环绕球外部并在其中心具有大圆的宽度为d的条带(即,将条带平分)必须接触至少一个标记,而无论大圆在球体上的位置如何。在下文中,该条带将被称为宽度为d的大圆。距离d被定义为从大圆到最近的标记的最近部分的最大距离。
40.图1a示出了第一标记球100,其具有围绕大圆gc延伸的宽度为2d的带104,其中,标记102满足定位要求——即,标记102分布在球100上,使得球上没有大圆gc不在至少一个标记102的距离d内通过。在这个说明性示例中,被标记的球100在该图所示的球面部分有六个标记102。其他标记102可以用在图1a中未显示的球100的另一侧。如上所述,每个标记102的反射率与球的其余部分不同。
41.如本领域技术人员所理解的那样,这可以通过形成具有高于球本身的反射率(相
对于雷达信号而言)的材料的标记来实现,或者通过形成具有形成岛屿的标记的高反射材料层来实现,该形成岛屿的标记不包括高反射材料或者已经去除了高反射材料。如图所示,围绕大圆gc的带104至少接触一个标记102,而且,从对球100的几何形状和标记102的位置和尺寸的分析可以推断出,这对于可以在球100上绘制的任何大圆都适用。为了确保满足这个条件,标记102是必须的。
42.图1b示出了具有带104的第二标记球110的视图,其中,带104围绕在其上绘制的宽度为2d的大圆gc,不满足定位要求。在图1b中,在第二个球110的球面上示出了四个标记102,其它标记102可以包括在图1b中未示出的球110的相对侧上,但是被定位为使得它们都不触及带104。如图所示,gc周围的带104不接触任何标记102。在这个说明性示例中,假设带104也不接触球110的相对侧上的任何标记102。因此,球110的标记定位不满足定位要求,并且对于持续地生成用于确定自旋参数的有用数据是不可接受的。例如,球110可以以这样的方式自旋,即在球110的最大自旋区域中不存在标记102。
43.一个可选的附加标记定位限制是,如果一个以上的标记触及围绕大圆的宽度为2d的带,则本实施方式中的这组标记可能不会对称分布在围绕该大圆的公差为m的范围内,或者由此产生的调制可能使其难以在选项都是彼此的整倍数之间确定自旋速率——即,相同的数据可能代表1,000、2,000或3,000rpm等。换句话说,对于具有两个或更多标记接触宽度的2d的带的任何大圆来说,这些标记不得围绕大圆彼此等角度地分开。在两个标记接触大圆带的情况下,触及宽度为2d的带的第一个标记102必须与触及该带的第二个标记102'径向相对的位置dp的最近部分相隔至少距离m。
44.在3个标记接触大圆带的情况下,标记需要与大圆上完美的120度分布的标记间隔一定的距离m,并且类似的限制将被应用于接触大圆带的标记超过3个的任意数量的标记。尽管对于不同的球来说,距离m可能会有所不同,但通常该距离m明显小于球的直径(例如,通常是球直径的1/10或更小)。随着m的值接近零,标记102和第二标记102'的投影dp之间的距离将缩小,直到标记102与投影dp相接。
45.图1c示出了沿着球的自旋轴看第三标记球120的视图(即,示出了球120的横截面,其包括定义球120的最大自旋速度的路径的大圆gc)。球120具有多个标记102、102',它们与围绕大圆gc的宽度为2d的带相接触,并且满足如下所述的附加定位限制。本示例中示出了两个标记102、102',每个标记都有对应的径向(相对于gc)相反的投影(分别为dp、dp')。标记102和标记102'的投影dp'之间的距离124被显示为大于距离m。本领域技术人员将认识到,几何学决定了标记102'和标记102的投影dp之间的距离等于距离124。因此,该特定大圆104的标记定位满足上面讨论的附加定位限制。
46.图1d示出了沿着如图1c中的球130的自旋轴看的第四标记球130。球130包括接触围绕大圆gc的宽度为2d的带的第一标记102和同样接触围绕gc的带的第二标记102'。然而,如图1d中所见,标记102'的投影dp'与标记102间隔的距离134小于m,并且在该示例中,标记102和dp'实际上是重叠的。换句话说,标记102与dp'之间的距离为负数,该距离显然小于m。因此,标记102和投影132之间的距离违反了附加定位限制。换言之,标记102在大圆104周围分布得过于对称。当标记在大圆周围的位置过于对称时,接收到的多普勒信号可能具有以下特性,当应用,例如,美国专利no.8845442中所述的方法时,会增加这样的风险:计算出的自旋速率比实际自旋速率高n倍,其中,n是接触大圆的标记数。可选的附加定位限制消除了
这种风险。然而,正如本领域技术人员所理解的那样,也可以使用其他方法来检测计算出的自旋速率是否实际上是正确自旋速率的n倍,并采取适当的步骤来纠正这一错误。
47.如上所述,可以使用各种标记布置来满足这两个要求。一般来说,可以使用奇数个标记,其中,每个标记与任何相邻标记相隔最小距离,并且相对于球体上的任何其他标记是不对称的。正如下面将进一步详细描述的,球的标记可以在球的表面上或在球的表面下的一层上。当标记位于球的外表面以下时,用于外表面的覆盖材料对雷达所使用的辐射(例如,微波辐射)应该基本上是半透明的,以便这种辐射可以穿透球到达标记并从中反射出来(或以不同的方式从球的其他部分反射,该其他部分在同一层内、在球的表面上或者嵌入在另一层中)。当高尔夫球的标记在外表面时,标记应该是高度耐用的,以便它们在使用过程中不会脱落和/或弄脏高尔夫模拟器中的击球屏幕。正常的磨损,如对高尔夫球品牌的磨损,是可以预期的。
48.如上所述,标记必须具有与球的其他区域不同的电反射率(或更准确地说,相对于由雷达系统产生和收集的辐射的反射率),从而在围绕球的表面分布的不同点处形成对比区域。例如,标记在所使用的雷达频率范围内可以是导电的,从而放大了自旋球的反射雷达信号的调制信号。即使当球的飞行时间很短时,自旋调制信号也可用于确定球的自旋速度和自旋轴。
49.示例性的球形球可以在除了球的最外层(即外表面)以外的其他层上进行标记。球形球的层是指在球上或球内以球的中心为中心的球形表面。这些层可以是基本单一核心的抽象几何分割,或者可以由相互重叠以形成球的独立的材料层来限定。
50.根据一个实施方式,球具有一个或多个由典型的球材料(例如,用于高尔夫球的塑料或橡胶)构成的第一区域,以及具有微波反射系数γ2的材料的多个第二区域(标记)。本领域技术人员可以理解,微波反射系数表示微波传播通过的空气与球的特定区域的特定材料之间的波阻抗差异。尽管确定从球反射到雷达的波的精确形式的现象很复杂,但只要理解选择具有不同的微波反射率值的材料将最有效地产生可测量的调制,以对自旋特性进行精确测量。第二区域可以位于单层到多层球的任何一层。在与第二区域相同的层上,球还具有一个或多个第一材料区域,其微波反射系数γ1不同于γ2。如上所述,第二区域可以是任何形状的标记,例如圆形、矩形或其他具有封闭几何形状的形状。对于一个给定的球,第二区域可以分别放置在同一层或不同层上。另外,第二区域可以由典型的球材料组成,例如,用于高尔夫球的塑料或橡胶,而该层中的第一区域则由反射材料形成。
51.根据另一个实施方式,球具有如上所述的第一区域和第二区域,另外的限制是第一区域和第二区域都由具有如上所述的不同微波反射特性的非导电材料形成。根据又一实施方式,只有第二区域是由非导电材料形成,而第一区域由导电材料形成。第一区域可以是任何材料的混合物。通常情况下,对于运动球来说,球结构的材料对于球的任何球形层基本上是相同的,但这并不是必需的。重要的是,第二区域的微波反射率与第一区域的微波反射率明显不同,从而放大了接收到的多普勒信号的自旋产生的调制。
52.第二区域可以被认为形成了上述的标记。标记可以分布在球内的各种深度处,只要标记到球外表面的投影在按照上述的第一定位限制和可选的第二定位限制分布在外表面上。标记可以具有任何闭合的形状,并且不需要完全相同。所有标记的总面积通常占球的表面积的1~50%。当标记位于球的最外层以下的一层时,面积从球的中心投射到外表面,
并且该投影的标记区域用于确定是否满足第一标记定位要求。
53.在从一种介质过渡到另一种介质时的微波反射系数γ取决于介质之间对于以下参数之一的相对差异:介电常数ε、磁导率μ和电导率σ。如果这三个参数中的一个或多个不同,则微波的部分电磁场会在两种介质之间的边界区域反射。
54.两种介质之间的微波反射系数γ由下式给出:
[0055][0056]
其中,z1为介质1中的波阻抗,z2为介质2中的波阻抗。反射系数可以是复数,即具有幅值|γ|和相位(γ)的数。
[0057]
第二区域可以使用不同的材料。然而,导电材料如铝、铜和银会产生良好的效果。特别是含有银的油墨已被证明特别适合用于第二区域。
[0058]
根据另一实施方式,球形球被标记为仅满足上述定位要求中的一个。在该实施方式中,标记的定位要求是围绕球形球的任何大圆可以在最大程度上与最近的一个标记相距给定距离d,其中,距离d最大为球的直径的1/5。
[0059]
与上述类似,标记可以被应用于典型的多层球的任何一层上。对于高尔夫球来说,球的标记也可以应用在覆盖层(cover)的顶部,但是为了使标记更持久,优选将标记放置在球的一个或多个内层上。需要指出的是,标记在球中的位置越深,即标记所在的层越低,雷达需要“透视”的层就越多。微波辐射到达标记需要穿透的球材料越多,信号衰减得越多,从而使得标记在提供有用数据的效率降低。通常情况下,一个折中的办法是将标记设置在外涂层下,但在覆盖层的上面,覆盖层位于球的外壳(或核心)的顶部。另外,标记也可以直接放置在覆盖层下方。与上述类似,标记可以应用在球的不同层上。
[0060]
可以制作许多不同图案的球标记以满足定位要求。然而,生产限制可能会限制哪些图案是可行的。例如,基于生产设备,球的某些区域可能被排除在标记之外。与上述类似,标记图案可以包括圆形的标记。然而,任何形状的标记都是可行的,包括矩形、五边形、六边形、星形等。在一些生产设置中,应用第二区域将通过用,例如,导电油墨等冲压第二区域来实现。为了使这一操作具有成本效益,可能需要在球上仅冲压一次。根据制造机器的构造,这种单次冲压可能将油墨的涂敷主要限制在球的单个半球上,这样使得球的这一半或甚至稍微较小的区域可用于包括第二区域。这种类型的生产设置消除了如果采用多于一次的油墨涂敷可能需要的额外的固化时间(即消除了第一次涂敷和第二次涂敷之间的固化时间等),以及重新定位球并执行第二次油墨涂敷所需的时间。
[0061]
在一个实施方式中,标记图案可以与围绕球延伸的接缝(例如棒球接缝)共同延伸,或者沿着与这种路径相似的路径,即使它与接缝不在同一位置。标记图案不需要覆盖整个接缝,即,可以是虚线标记图案,以满足定位要求。如本领域技术人员所理解的那样,棒球的接缝通常形成连续的弯曲路径,沿着该路径,将两个覆盖件彼此连接。两个覆盖件中的每一个通常形成为具有两个圆形端部的平面形状,通过中央的狭窄部分相互连接。因此,当这两个覆盖件在球形芯上拉伸时,它们沿着连续弯曲路径相遇(参见图9中的302),该路径穿过围绕球的每个大圆。
[0062]
其他标记图案可以类似于在网球、足球、篮球、排球或任何其他运动球上发现的接缝图案,尤其是在这些接缝型图案穿过球周围的每个大圆的情况下。本领域技术人员可以
理解,任何接缝型的标记方案都不仅仅适用于棒球或其他有缝的球,而是可以适用于任何运动球,例如,高尔夫球,无论它是否具有接缝。这些接缝型的标记图案也可以是虚线,同时仍然满足定位要求。在其他实施方式中,这些标记可以与球上的文本图案共同扩展,这些文本图案用于,例如,球的视觉品牌。对于一些球来说,这些视觉上的文本图案通常应用在涂层下方的覆盖层上。如上所述,标记可以应用在任何一层,包括可见层和不可见层。使标记为虚线是减少标记所需材料量的一种方法,并且还可以减少第二区域的粘合性能恶化的风险。
[0063]
当标记以接缝状图案布置时,附加了额外的要求。具体而言,要求接缝状标记的宽度介于雷达所使用的辐射波长的1/20到1/2之间。例如,对于直径为42.7mm的高尔夫球和工作频率为10~24ghz(对应波长为10~30mm)的雷达,标记的合适宽度约为1~10mm。然而,也可以使用在不同的微波频谱下工作的其他雷达,例如,从1~125ghz的任何频率。此外,即使雷达信号的波长相同,也可以在较大的球上使用较大的标记。
[0064]
下面的图2~3中示出一些可行的接缝图案的示例。其中一个示例显示了用于球的视觉品牌的可选文本图案。该文本不需要是具有不同反射率的标记区域,但可以是具有不同反射率的标记区域。视觉文本图案通常应用在涂层下方的覆盖层上,而用于球的标记的接缝图案可以应用在球上可见或不可见的任何一层。
[0065]
图2a~b示出了根据本公开的一个实施方式的具有第一标记图案的标记球200。球200被标记有六个条纹202,这些条纹被布置成连接球上的四个标记间隙204。为了说明所有的标记202,球200被透明地显示出来。如图所示,条纹202没有完全连接,而是在条纹202的相交点周围留下了标记空隙204。在其他实施方式中,条纹204可以不是完全的直线或等宽。例如,如果需要,条纹204可以是锥形的。一般来说,标记需要相对于每个大圆分布在球的表面上,以便第一和第二区域都能由于球的自旋而产生明显的雷达调制。
[0066]
这可以通过确保接触大圆的第二区域的每个标记的长度与波长相比是足够的,并且标记之间的第一区域的长度与波长相比也足够来生成自旋调制,无论球和自旋轴相对于雷达的方向如何。与波长相比,足够的长度意味着它通常比波长的1/20长,但对于第二区域来说,最好是接近波长的0.2倍。为了节省在第二区域的涂敷成本,最好使第二区域最大达到沿任何大圆的累积距离的25%。这意味着,例如,作为围绕球的整个赤道形成的第二区域是不可取的,因为与该赤道重合的大圆将沿着大圆具有沿着大圆的100%的第二区域,因此,在这个特定的自旋轴上只会产生非常弱的自旋调制。
[0067]
图3a~b示出了根据本公开的一个实施方式的具有第二标记图案的标记球300。球300用棒球接缝式图案302来标记,其中棒球接缝式图案302的材料具有与球300的其余部分不同的反射特性。该接缝不必是连续的,但可以是虚线。球300还包括品牌区304,供公司在球上标记品牌。如上所述,如果需要的话,品牌区也可用于反射标记。
[0068]
图4示出了根据示例性实施方式的用于确定运动球的自旋轴的系统400。系统400包括雷达装置402,其瞄准目标区域,运动球在其飞行的至少一部分期间将通过该目标区域。在示例性系统400中,运动球是上面讨论的运动球200。然而,运动球200可以代表根据上文讨论的标记定位要求而标记的任何运动球。在本实施方式中,雷达402包括发射器404和至少三个接收器406。在本实施方式中,接收器406被分布成使得接收器406a和406b彼此垂直对齐,并且接收器406a和406c彼此水平对齐。
[0069]
然而,本领域技术人员可以理解,只要雷达装置102包括三个或更多个接收器天线,其中至少有三个接收器天线彼此不共线,那么接收器406就不需要垂直或水平对齐。本领域技术人员可以理解,接收器对不需要彼此正交。正如本领域技术人员所理解的那样,分离的接收器406a、406b、406c的几何布置允许分析从运动球反射到接收器406a、406b、406c的雷达信号,以推导出球的自旋轴(球围绕其旋转的轴)在一个或多个时间点的方向。
[0070]
雷达402,例如,可以是连续波多普勒雷达,其以高达500毫瓦eirp(等效各向同性辐射功率)的功率在x波段频率(10ghz)发射微波,因此符合fcc和ce关于短距离国际散热器的法规。然而,在其他司法管辖区,可以根据当地法规使用其他功率级别和频率。在示例性实施方式中,微波以较高频率发射,例如,在5~125ghz之间。为了在较低的物体速度下进行更精确的测量,可以使用20ghz或更高的频率。可以使用任何类型的连续波(cw)多普勒雷达,包括相位或频率调制cw雷达、多频cw雷达或单频cw雷达。
[0071]
可以理解的是,其他跟踪设备,如激光雷达,可用于可见或不可见频率区域的辐射。电流脉冲雷达系统在跟踪靠近雷达装置的物体方面的能力有限。然而,物体必须与这些脉冲雷达系统相距的距离已经随着时间的推移而减少,预计还会继续减少。因此,这些类型的雷达可能很快就会对这些操作有效,并且它们在下面描述的本发明的系统中的使用是可以预期的。在整个应用中,对象的跟踪是基于多普勒频谱的使用来描述的。正如可以理解的那样,这些多普勒频谱是指来自所使用的任何类型的雷达或激光雷达的多普勒频谱。
[0072]
系统400进一步包括处理单元408,如本领域技术人员所理解的,其可以包括一个或多个处理器,该处理器通过例如有线或无线连接,与雷达装置402(或多个雷达装置)进行通信。在一个实施方式中,处理单元408包括与雷达装置402相关联的计算机。
[0073]
在图4的实施方式中,系统400是一个用于确定球,例如球200的自旋轴的系统,其中球从给定的发射位置被发射到目标区域内或进入目标区域,目标区域在雷达402的视场内。正如本领域技术人员所理解的那样,目标区域不需要是任何专门创建的区域,发射位置可以是雷达402的视场内或外的任何位置。当被发射到目标区域时,球200沿着飞行路径行进,同时围绕自旋轴在自旋方向上旋转。本领域技术人员应理解,虽然高尔夫球200的自旋是通过用高尔夫球杆击打高尔夫球200而产生的,但同样的分析可以应用于任何运动球,无论它是被击、投掷、踢、顶、被任何击打工具(例如棒球棒)击中等。
[0074]
当高尔夫球200从发射位置发射时(如果发射位置在雷达402的视场内)或当高尔夫球200进入雷达402的视场并沿着飞行路径移动时,雷达402跟踪高尔夫球200。随着高尔夫球200的移动,由雷达402产生的雷达信号被高尔夫球200反射,并随后被雷达接收器406接收。然后可以基于接收信号相对于发射信号的多普勒频移确定自旋参数。在美国专利公开号2019/0282881中描述了用于确定自旋参数的示例性计算,其公开内容通过引用并入本文。
[0075]
图5示出了用于确定自旋球的自旋轴的示例性方法500。在该实施方式中,利用了多接收器雷达设置,其包括安装在一个平面中的三个接收器天线406a,406b,406c。可选地,可以使用额外的接收器天线来提高所确定位置的精度,并导出三维(3d)自旋轴。根据上面讨论的标记定位要求,用反射材料对自旋球进行标记。
[0076]
在505中,雷达402产生信号,该信号被发射到目标区域,并从自旋的高尔夫球反射之后被接收器406a、406b、406c接收,从而产生表现出多普勒频谱的相应信号。可以理解的
是,相对于雷达402,球可以是静止的或在任何方向上移动。由于球的自旋运动,接收到的多普勒信号在与球相对于雷达402的平移运动相关联的多普勒频移值附近被展宽。也就是说,反射信号将在一个频率范围内传播,反映球在相对于雷达402自旋和移动时不同部分的相对速度范围。来自球的标记区域(即球的具有与球其余部分不同的反射率的区域)的反射信号将被放大,这是因为反射率增强的区域与球200的其余部分之间的对比度增加。
[0077]
在510中,从反射信号中确定三维自旋参数。自旋参数至少包括自旋速度和自旋球的自旋轴的方向。
[0078]
本领域技术人员应理解,在不脱离其发明构思的情况下,可以对上述实施方式进行改变。还应当理解,与实施方式之一相关联的结构特征和方法可以并入到其他实施方式中。因此,可以理解的是,本发明并不局限于所公开的特定实施方式,而是也涵盖落入所附权利要求书限定以及其等同范围内的修改和变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。