1.本实用新型属于阻尼装置技术领域,涉及一种用于双向震动控制的大伸缩组合装置。
背景技术:
2.大跨度桥梁抗震保护技术中,顺桥向一般设置有黏滞型阻尼器,一方面既可以适应结构在正常使用状态下上部结构沿该方向的产生的温度伸缩变形,另一方面也可以在地震过程中提供耗能限位的功能。横桥向一般设置有金属阻尼器,要求金属阻尼器同样适应上部结构沿顺桥向的变形,目前技术途径主要为类似中国专利cn101748685a和cn 102953327 a中的预留滑槽的形式加以解决,即正常使用状态下球形部件可以在预留滑槽内沿顺桥向自由滑动,地震作用时,滑槽槽壁沿横桥向接触钢阻尼装置,迫使阻尼单元发生屈服,产生耗能行为。需要特别指出的是,上述处理方式严重忽视了地震过程中由于顺桥向与球形部件的接触摩擦行为可能对钢阻尼单元在横桥向地震力学行为的影响,增加了抗震保护系统中的不稳定因素,其抗震性能值得进一步实践检验。
3.中国专利cn 207597232 u和cn 205917589u先后公开了一种设有斜置式桥梁抗震阻尼器的大跨度漂浮体系斜拉桥和一种速度锁定悬臂棒支座,前者主要通过将黏滞型阻尼器斜置的方式,使得1套阻尼装置可以同时控制桥梁顺桥向和横桥向的震动,减少阻尼器的使用数量,降低震动控制的使用成本。但是设置的4个斜置式桥梁抗震阻尼器在实际地震过程中很难实现完全同步协调变形。后者将钢阻尼元件与速度锁定器进行有效连接,发挥了钢阻尼器滞回行为稳定等优点,但是其只能实现桥梁沿顺桥向的单向震动控制,震动控制使用成本较高。
技术实现要素:
4.本实用新型的目的就是为了提供一种用于双向震动控制的大伸缩组合装置,以实现双向震动控制,可以在大跨度连续梁桥及缆索式承重桥梁等中推广应用。
5.本实用新型的目的可以通过以下技术方案来实现:
6.一种用于双向震动控制的大伸缩组合装置,包括固定托架、连接滑板、柱形钢阻尼单元、可伸缩模块以及抗弯锚板,其中,所述的固定托架的下方设有下表面开口的水平滑槽,所述的连接滑板间隙置于所述水平滑槽内,所述的可伸缩模块的一端与连接滑槽端部沿水平向铰接,另一端与基础结构(即如桥面基础等抗震基础结构)沿竖向铰接,所述的连接滑板与可伸缩模块之间沿水平方向铰接,所述的柱形钢阻尼单元的顶端与连接滑板的下表面活动连接,柱形钢阻尼单元底端安装在所述抗弯锚板上。
7.进一步的,所述的固定托架由上顶板、平行间隔布置在上顶板下表面的两块侧壁板,以及对应分别安装在两块侧壁板下方的承托板组成,所述侧壁板、承托板与上顶板之间围成所述水平滑槽。更进一步的,侧壁板的外侧表面还设有连接上顶板的加劲肋板,地震作用下加劲肋板提供足够的强度和刚度,使其通过连接滑板接触作用迫使柱形钢阻尼单元在
横桥方向进入塑性状态。
8.进一步的,所述的连接滑板与水平滑槽顶部的间隙为1
‑
2mm,连接滑板与水平滑槽两侧的间隙为1
‑
2mm。
9.进一步的,所述的柱形钢阻尼单元由若干呈阵列排布的柱形钢阻尼件组成,所述柱形钢阻尼件包括柱形钢主体、设置在柱形钢主体顶部的呈球形的传力键,以及设置在柱形钢主体底部的阻尼底座,所述的传力键与连接滑板之间活动连接,所述阻尼底座与抗弯锚板固定连接。
10.更进一步的,所述的连接滑板的下表面上加工有与所述传力键位置对应的圆形推力孔,所述的传力键置于所述圆形推力孔中,并与圆形推力孔的孔壁之间留有间隙。
11.更进一步优选的,所述的传力键与圆形推力孔之间的间隙为1
‑
2mm。
12.进一步的,所述的可伸缩模块由速度型控制部件,以及分别布置在速度型控制部件的水平向铰接件和竖向铰接件组成,所述的水平向铰接件还连接所述连接滑板,所述的竖向铰接件还连接所述基础结构。这样,可以通过水平向铰接件水平转动能力来释放连接滑板与固定托架两侧之间由于间隙可能产生的水平方向的转动位移,同时,也可以通过竖向铰接件的竖向转动能力来释放连接滑板与固定托架的顶部或连接滑槽的底部之间由于间隙而产生的竖直方向的转动位移。
13.更进一步的,所述的速度型控制部件为速度锁定器或黏滞型阻尼器。
14.更进一步的,所述的水平向铰接件包括与速度型控制部件一端固定连接的水平耳板、穿过所述水平耳板并具有水平向的转动自由度的水平连接插销,以及连接所述水平连接插销的水平向连接板,所述水平向连接板还固定连接所述连接滑板。
15.更进一步的,所述的竖向铰接件包括与速度型控制部件另一端固定连接的竖向耳板、穿过所述竖向耳板并具有竖向的转动自由度的竖向连接插销,以及连接所述竖向连接插销的竖向连接板,所述的竖向连接板还固定连接所述基础结构。
16.本实用新型中,可伸缩模块中的速度型控制部件的置慢速状态下的“弱”反力输出值小于柱形钢阻尼单元的初始屈服力值,快速状态下的“强”反力输出值大于柱形钢阻尼单元的最大屈服力值。
17.具体应用时,以抗弯锚板所连接的基础结构为桥梁墩(塔)为例,沿横桥方向,控制柱形钢租你单元的屈服位移与该方向安装间隙距离之和应不小于由于桥梁上部结构很宽等原因产生的温度伸缩位移。双向型钢减震模块中的固定托架、可伸缩模块与桥梁上部结构进行连接,双向型钢减震模块中的抗弯锚板则与桥梁下部结构进行连接。而在正常使用状态下,由于温度作用上部结构带动固定托架和可伸缩模块沿顺桥方向缓慢移动,此情况下,上部结构通过可伸缩模块将该水平作用传递给连接滑板,进而传递给柱形钢阻尼单元,此时固定托架只起承托连接滑板的辅助受力作用,由于速度型控制部件慢速状态下的“弱”反力输出,保证柱形钢阻尼单元仍在弹性范围内工作,传递给下部结构的作用力即速度型控制部件输出的“弱”反力。沿横桥方向,控制柱形钢阻尼单元的屈服位移与该方向安装间隙距离之和不小于有时由于桥梁上部结构很宽产生的温度伸缩位移,保证该方向钢阻尼单元始终处于弹性状态。
18.而在地震作用下,沿顺桥方向,由于速度型控制部件快速状态下的“强”反力输出,作用通过连接滑板传递给柱形钢阻尼单元;沿横桥方向,通过固定托架与连接滑板接触作
用传递给柱形钢阻尼单元,两个方向地震作用使得柱形钢阻尼单元发生屈服进入塑性,传递给下部结构的作用力即钢阻尼单元的最大屈服力。
19.在另一个具体应用中,以抗弯锚板所连接的基础结构为桥梁主梁为例,双向型钢减震模块中的抗弯锚板与桥梁上部结构进行连接,双向型钢减震模块中的固定托架和可伸缩模块与桥梁下部结构进行连接。正常使用状态下,由于温度作用上部结构有带动抗弯锚板和柱形钢阻尼单元沿顺桥方向缓慢移动趋势,激发了速度型控制部件的慢速工作状态,该温度变形均由速度型控制部件变形适应,此时柱形钢阻尼单元仍在弹性范围内工作,传递给下部结构的作用力即速度型控制部件输出的“弱”反力。沿横桥方向,控制柱形钢阻尼单元的屈服位移与该方向安装间隙距离之和不小于有时由于桥梁上部结构很宽产生的温度伸缩位移,保证该方向柱形钢阻尼单元始终处于弹性状态。
20.地震作用下,沿顺桥方向,上部结构带动抗弯锚板和柱形钢阻尼元件迅速移动,由于速度型控制部件快速状态下的“强”反力输出,柱形元件发生进入屈服状态;沿横桥方向,钢阻尼单元通过连接滑板与和墩顶连接的固定托架侧壁板接触作用,使得阻尼单元在该方向发生屈服进入塑性。
21.上述控制模式中,充分发挥柱形钢阻尼单元截面为圆形的优点,实现双向震动控制。
22.与现有技术相比,本实用新型具有以下优点:
23.(1)发挥了柱形钢阻尼圆形截面的优点,即1套装置可同时实现顺桥向和横桥向的震动控制,减少阻尼装置的使用数量,降低震动控制的使用成本。
24.(2)不仅进行顺桥方向的震动控制,同时还避免常规金属阻尼装置在横桥方向单向震动控制时由于顺桥方向在传力键位置接触可能产生的面外行为,两个方向的地震力学行为可控性更强。
25.(3)构造简单,力学路径清晰,耗能限位的主体为钢阻尼,发挥了钢阻尼的技术优势,易检修,易维护。
26.(4)空间普适性更强,可以灵活的根据工程中主梁下部挡块、墩台上部垫石支座等构件的实际布置情况,有方向选择性地安装本实用新型实施例中的组合装置。
附图说明
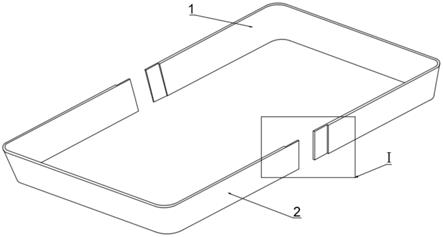
27.图1为实施例1中组合装置的三维结构示意图;
28.图2为实施例1中组合装置中的双向钢减震模块示意图;
29.图3为实施例1中组合装置中的可伸缩模块示意图;
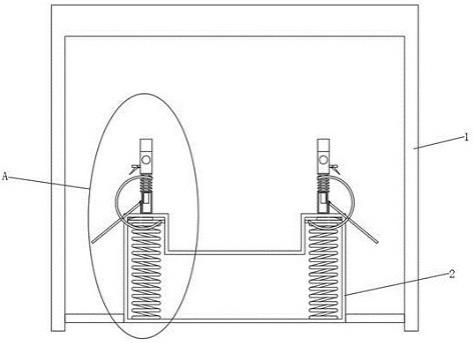
30.图4为实施例1中组合装置的前视结构示意图;
31.图5为实施例1中组合装置的侧倾视图;
32.图6为实施例1中双向型钢减震模块和可伸缩模块相关连接部件俯视图;
33.图7为实施例1中双向型钢减震模块和可伸缩模块相关连接部件等轴视图;
34.图8为实施例1中双向型钢减震模块和可伸缩模块相关连接部件左视图;
35.图9为实施例1中双向型减震模块中柱形阻尼集合;
36.图10为实施例1中双向型减震模块中的柱形钢阻尼单元单体;
37.图11为实施例1中双向型减震模块中的抗弯锚板;
38.图12为实施例1中组合装置慢速状态下的试验曲线;
39.图13为实施例1中组合装置快速状态下的试验曲线;
40.图14为实施例1中组合装置中不同快速工况下速度型控制部件力
‑
位移曲线;
41.图15为实施例2中组合装置的三维结构示意图;
42.图中标记说明:
[0043]1‑
固定托架,2
‑
连接滑板,3
‑
速度型控制部件,4
‑
柱形钢阻尼单元,5
‑
抗弯锚板,11
‑
上顶板,12
‑
侧壁板,13
‑
承托板,14
‑
加劲肋板,21
‑
圆形推力孔,31
‑
水平向铰接件,32
‑
竖向铰接件,33
‑
水平耳板,34
‑
水平向连接板,35
‑
水平连接插销,36
‑
竖向耳板,37
‑
竖向连接板,38
‑
竖向连接插销,41
‑
球形传力键,42
‑
阻尼底座,51
‑
锚固孔。
具体实施方式
[0044]
下面结合附图和具体实施例对本实用新型进行详细说明。本实施例以本实用新型技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本实用新型的保护范围不限于下述的实施例。
[0045]
以下各实施例中,如无特别说明的功能部件或结构,则表明其均为本领域为实现对应功能而采用的常规部件或结构。
[0046]
本实用新型提出了一种用于双向震动控制的大伸缩组合装置,其结构参见图1至图11、图15等所示,包括固定托架1、连接滑板2、柱形钢阻尼单元4、可伸缩模块以及抗弯锚板5,其中,所述的固定托架1的下方设有下表面开口的水平滑槽,所述的连接滑板2间隙置于所述水平滑槽内,所述的可伸缩模块的一端与连接滑槽端部沿水平向铰接,另一端与基础结构沿竖向铰接,所述的连接滑板2与可伸缩模块之间沿水平方向铰接,所述的柱形钢阻尼单元4的顶端与连接滑板2的下表面活动连接,柱形钢阻尼单元4底端安装在所述抗弯锚板5上。
[0047]
在一种具体的实施方式中,请再参见图8等所示,所述的固定托架1由上顶板11、平行间隔布置在上顶板11下表面的两块侧壁板12,以及对应分别安装在两块侧壁板12下方的承托板13组成,所述侧壁板12、承托板13与上顶板11之间围成所述水平滑槽。更进一步的,侧壁板12的外侧表面还设有连接上顶板11的加劲肋板14,地震作用下加劲肋板14提供足够的强度和刚度,使其通过连接滑板2接触作用迫使柱形钢阻尼单元4在横桥方向进入塑性状态。
[0048]
在一种具体的实施方式中,所述的连接滑板2与水平滑槽顶部的间隙为1
‑
2mm,连接滑板2与水平滑槽两侧的间隙为1
‑
2mm。
[0049]
在一种具体的实施方式中,请再参见图1等所示,所述的柱形钢阻尼单元4由若干呈阵列排布的柱形钢阻尼件组成,所述柱形钢阻尼件包括柱形钢主体、设置在柱形钢主体顶部的呈球形的传力键,以及设置在柱形钢主体底部的阻尼底座42,所述的传力键与连接滑板2之间活动连接,所述阻尼底座42与抗弯锚板5固定连接。柱形钢阻尼单元4(主要柱形钢主体部分)为耗能变形的主体,力学模型基于等强度原理设计的悬臂梁结构,其截面为圆形,其母线形式为多次曲线,制作的材料宜选用低屈服点的软钢或其他具有良好延性特性的钢材。发生变形时,悬臂结构的大部分主体共同进入塑性,使得柱形钢阻尼单元具备良好的耗能特性。阻尼底座42为钢阻尼单元4在底部的扩展端,与阻尼单元一体化设计加工,用
于提高与抗弯锚板5连接性能,装置工作时,阻尼底座42不发生任何变形,功能是在阻尼单元4和抗弯锚板5之间提供可靠有效的连接。柱形钢阻尼单元4截面为圆形的优势为一套装置可以提供顺桥方向和横桥方向两个方向的阻尼力,控制效果与沿各方向分别设置其他形式的钢阻尼装置相同。(柱形钢阻尼单元的具体结构材质等要求可以参考以下文献:
[0050]
【1】tyler r g.tapered steel energy dissipators for earthquake resistant structures[j].bulletin of the new zealand national society for earthquake engineering,1978,11(4):282
‑
294.
[0051]
【2】gao h,wang j.research on differences between cylindrical and e
‑
shaped dampers for the bidirectional seismic control[j].journal of bridge engineering,2020,25(4):04020008.
[0052]
更具体的实施方式中,请再参见图6等所示,所述的连接滑板2的下表面上加工有与所述传力键位置对应的圆形推力孔21,所述的传力键置于所述圆形推力孔21中,并与圆形推力孔21的孔壁之间留有间隙。
[0053]
更进一步具体的实施方式中,所述的传力键与圆形推力孔21之间的间隙为1
‑
2mm。
[0054]
在一种具体的实施方式中,请再参见图3等所示,所述的可伸缩模块由速度型控制部件3,以及分别布置在速度型控制部件3的水平向铰接件31和竖向铰接件32组成,所述的水平向铰接件31还连接所述连接滑板2,所述的竖向铰接件32还连接所述基础结构。这样,可以通过水平向铰接件31水平转动能力来释放连接滑板2与固定托架1两侧之间由于间隙可能产生的水平方向的转动位移,同时,也可以通过竖向铰接件32的竖向转动能力来释放连接滑板2与固定托架1的顶部或连接滑槽的底部之间由于间隙而产生的竖直方向的转动位移。
[0055]
更具体的实施方式中,所述的速度型控制部件3为速度锁定器或黏滞型阻尼器。
[0056]
更具体的实施方式中,请再参见图2和图3等所示,所述的水平向铰接件31包括与速度型控制部件3一端固定连接的水平耳板33、穿过所述水平耳板33并具有水平向的转动自由度的水平连接插销35,以及连接所述水平连接插销35的水平向连接板34,所述水平向连接板34还固定连接所述连接滑板2。
[0057]
更具体的实施方式中,请再参见图3等所示,所述的竖向铰接件32包括与速度型控制部件3另一端固定连接的竖向耳板36、穿过所述竖向耳板36并具有竖向的转动自由度的竖向连接插销38,以及连接所述竖向连接插销38的竖向连接板37,所述的竖向连接板37还固定连接所述基础结构。
[0058]
本实用新型中,可伸缩模块中的速度型控制部件3的置慢速状态下的“弱”反力输出值小于柱形钢阻尼单元4的初始屈服力值,快速状态下的“强”反力输出值大于柱形钢阻尼单元4的最大屈服力值。
[0059]
具体应用时,以抗弯锚板所连接的基础结构为桥梁墩(塔)为例,沿横桥方向,控制柱形钢阻尼单元的屈服位移与该方向安装间隙距离之和应不小于由于桥梁上部结构很宽等原因产生的温度伸缩位移。双向型钢减震模块中的固定托架1、可伸缩模块与桥梁上部结构进行连接,双向型钢减震模块中的抗弯锚板5则与桥梁下部结构进行连接。而在正常使用状态下,由于温度作用上部结构带动固定托架1和可伸缩模块沿顺桥方向缓慢移动,此情况下,上部结构通过可伸缩模块将该水平作用传递给连接滑板2,进而传递给柱形钢阻尼单元
4,此时固定托架1只起承托连接滑板2的辅助受力作用,由于速度型控制部件3慢速状态下的“弱”反力输出,保证柱形钢阻尼单元4仍在弹性范围内工作,传递给下部结构的作用力即速度型控制部件3输出的“弱”反力。沿横桥方向,控制柱形钢阻尼单元4的屈服位移与该方向安装间隙距离之和不小于有时由于桥梁上部结构很宽产生的温度伸缩位移,保证该方向钢阻尼单元始终处于弹性状态。
[0060]
而在地震作用下,沿顺桥方向,由于速度型控制部件3快速状态下的“强”反力输出,作用通过连接滑板2传递给柱形钢阻尼单元4;沿横桥方向,通过固定托架1与连接滑板2接触作用传递给柱形钢阻尼单元4,两个方向地震作用使得柱形钢阻尼单元4发生屈服进入塑性,传递给下部结构的作用力即钢阻尼单元的最大屈服力。
[0061]
在另一个具体应用中,以抗弯锚板所连接的基础结构为桥梁主梁为例,双向型钢减震模块中的抗弯锚板5与桥梁上部结构进行连接,双向型钢减震模块中的固定托架1和可伸缩模块与桥梁下部结构进行连接。正常使用状态下,由于温度作用上部结构有带动抗弯锚板5和柱形钢阻尼单元4沿顺桥方向缓慢移动趋势,激发了速度型控制部件3的慢速工作状态,该温度变形均由速度型控制部件3变形适应,此时柱形钢阻尼单元4仍在弹性范围内工作,传递给下部结构的作用力即速度型控制部件3输出的“弱”反力。沿横桥方向,控制柱形钢阻尼单元4的屈服位移与该方向安装间隙距离之和不小于有时由于桥梁上部结构很宽产生的温度伸缩位移,保证该方向柱形钢阻尼单元4始终处于弹性状态。
[0062]
地震作用下,沿顺桥方向,上部结构带动抗弯锚板5和柱形钢阻尼元件迅速移动,由于速度型控制部件3快速状态下的“强”反力输出,柱形元件发生进入屈服状态;沿横桥方向,钢阻尼单元通过连接滑板2与和墩顶连接的固定托架1侧壁板12接触作用,使得阻尼单元在该方向发生屈服进入塑性。
[0063]
上述控制模式中,充分发挥柱形钢阻尼单元4截面为圆形的优点,实现双向震动控制。
[0064]
以上各实施方式可以任一单独实施,也可以任意两两组合或更多的组合实施。
[0065]
下面结合具体实施例来对上述实施方式进行更详细的说明。
[0066]
实施例1:
[0067]
参考图1
‑
图11,本实施例提供一种双向震动控制的大伸缩组合装置,其为正置的组合装置,包括由上顶板11、侧壁板12、承托板13、加劲肋板14、连接滑板2、柱形钢阻尼单元4、抗弯锚板5、水平向铰接件31、速度型控制部件3、竖向铰接件32。
[0068]
参考图2,由上顶板11、侧壁板12、承托板13、加劲肋板14、连接滑板2、柱形钢阻尼单元4、抗弯锚板5组成双向型钢减震模块。
[0069]
参考图1
‑
图3,由水平向铰接件31、速度型控制部件3和竖向铰接件32组成可伸缩模块。
[0070]
可伸缩模块通过水平向铰接件31与双向型钢减震模块进行连接。
[0071]
水平向铰接件31由水平耳板33、水平向连接板34和水平连接插销35组成,竖向铰接件32由竖向耳板36、竖向连接板37和竖向连接插销38组成。
[0072]
本实例中,双向型减震模块中的上顶板11和可伸缩模块中的竖向铰接件32与桥梁上部结构连接,双向减震模块中的抗弯锚板5与桥梁下部结构连接,此时占据桥梁主梁梁底部的安装空间相对较大。
[0073]
参考图4
‑
图6,连接滑板2下方设置有柱形钢阻尼单元4,连接滑板2上加工有圆形推力孔21,柱形钢阻尼单元4上方设置有球形传力键41,连接滑板2与柱形钢阻尼单元4之间通过圆形推力孔21和球形传力键41实现活动连接。
[0074]
本实例中,圆形推力孔21与球形传力键41之间间隙距离为1~2mm。
[0075]
参考图7
‑
图8,固定托架1由上顶板11、侧壁板12、承托板13、加劲肋板14组成。固定托架1与连接滑板2之间为悬挂接触连接。
[0076]
本实例中侧壁板12与连接滑板2之间的水平间隙距离设置为1~2mm,水平向铰接件31的转动角度与该水平间隙距离可能产生的转角位移相适应。上顶板11与连接滑板2之间的竖向间隙距离设置为1~2mm,竖向铰接件32的转动角度与该竖向间隙距离可能产生的转角位移相适应。
[0077]
参考图9
‑
图11,柱形钢阻尼单元4为基于等强度原理设计的悬臂棒形,悬臂端部设置有一体化加工设计的球形传力键41(即球头式的结构),锚固根部设置有阻尼底座42,抗弯锚板5上设置有锚固孔51,柱形钢阻尼单元4通过阻尼底座42和锚固孔51实现与抗弯锚板5的连接。
[0078]
本实例中,速度型控制部件3是根据温度伸缩定制行程的黏滞型阻尼器。黏滞型阻尼器在桥梁正常运营状态下输出反力为123kn(本实例中温度作用下上下部结构相对运动速度不大于0.005mm/s),此为慢速状态。出于对温度伸缩定制行程的黏滞型阻尼器单独试验的保护作用,试验中最大加载速度为2mm/s,输出反力为715kn。
[0079]
配合使用的柱形钢阻尼单元4的初始屈服力为150kn,加载至最大变形300mm时,最大屈服力为346kn。
[0080]
可伸缩模块与双向型钢减震模块连接后,双向型钢减震模块中的柱形钢阻尼单元4对可伸缩模块中的定制行程的黏滞型阻尼器具有过载保护作用,试验测试时采用接近地震时的真实相对速度,分别为2mm/s,8mm/s,20mm/s,40mm/s,60mm/s,100mm/s,150mm/s,200mm/s。
[0081]
参考图12
‑
图13,正常使用状态下,由于温度作用上部结构带动固定托架1和竖向铰接件32沿顺桥方向缓慢移动,此状态下,上部结构通过竖向铰接件32及定制行程的黏滞型阻尼器将该水平作用传递给连接滑板2,进而传递给柱形钢阻尼单元4,此时固定托架1只起承托连接滑板2的辅助受力作用,由于定制行程的黏滞型阻尼器慢速状态下的“弱”反力输出,本实例中考虑该速度范围小于0.005mm/s,输出值为123kn,小于柱形钢阻尼单元4的初始屈服力150kn,柱形钢阻尼单元4仍在弹性范围内工作,传递给下部结构的作用力即定制行程的黏滞型阻尼器输出的“弱”反力123kn。沿横桥方向,控制柱形钢阻尼单元4的屈服位移与该方向安装间隙距离之和不小于有时由于桥梁上部结构很宽产生的温度伸缩位移,保证该方向柱形钢阻尼单元4始终处于弹性状态。
[0082]
地震作用下,由于定制行程的黏滞型阻尼器快速状态下的“强”反力输出,本实例中相对速度2mm/s时,输出值为715kn。作用沿顺桥方向通过连接滑板2传递给柱形钢阻尼单元4,柱形钢阻尼单元4屈服进而进入塑性状态,此情况下黏滞型阻尼器与柱形钢阻尼单元4受力相等。相对速度更高时,对本实例中试验情况,由于柱形钢阻尼单元4的过载保护作用,定制行程的黏滞型阻尼器的动力行为并未发生明显改变,参考图14,即可伸缩模块中的黏滞型阻尼器在地震工况时对速度变化不敏感。且该状态下,组合装置的耗能主体为钢阻尼,
参考图13,柱形钢阻尼单元4的力
‑
位移滞回曲线饱满,展现出良好的耗能特性,黏滞型阻尼器的力
‑
位移曲线呈现为狭长的针叶状,主要起连接传力作用。沿横桥方向通过固定托架1与连接滑板2接触作用将上部结构惯性力传递给柱形钢阻尼单元4。
[0083]
前述传递给下部结构的作用力不会超过柱形钢阻尼单元4的最大屈服力346kn。
[0084]
上顶板11与侧壁板12外侧设置有加劲肋板14,地震作用下加劲肋板14提供足够的强度和刚度,通过与连接滑板2接触作用迫使柱形钢阻尼单元4在横桥方向进入塑性状态。
[0085]
实施例二
[0086]
参考图15,部件参数与实例一中一致,但本实例中双向型钢减震模块中的抗弯锚板5与桥梁上部结构进行连接,双向型钢减震模块中的上顶板11和可伸缩模块中的竖向铰接件32与桥梁下部结构进行连接,即为倒置的组合装置,此时占据桥梁墩(塔)顶部的安装空间相对较大。
[0087]
正常使用状态下,由于温度作用上部结构有带动抗弯锚板5和柱形钢阻尼单元4沿顺桥方向缓慢移动趋势,激发了速度型控制部件3的慢速工作状态,输出反力值不大于123kn,小于柱形钢阻尼单元4初始屈服力150kn。该温度变形均由速度型控制部件33变形适应,此时钢阻尼单元仍在弹性范围内工作,传递给下部结构的作用力不大于速度型控制部件3输出的“弱”反力123kn。沿横桥方向,控制柱形钢阻尼单元4的屈服位移与该方向安装间隙距离之和不小于有时由于桥梁上部结构很宽产生的温度伸缩位移,则该方向柱形钢阻尼单元4始终处于弹性状态。
[0088]
地震作用下,沿顺桥方向,上部结构带动抗弯锚板5和柱形钢阻尼单元4迅速移动,由于速度型控制部件3快速状态下的“强”反力输出,使得柱形钢阻尼单元4发生进入屈服状态,此时速度型控制部件3输出的反力值与该变形条件下柱形钢阻尼单元4的屈服力一致;沿横桥方向,柱形钢阻尼单元4通过连接滑板2与和墩顶连接的侧壁板12接触作用,使得柱形钢阻尼单元4在该方向发生屈服进入塑性。
[0089]
上述控制模式中,同时实现顺桥方向和横桥方向的震动控制,充分发挥柱形钢阻尼单元4截面为圆形、各方向力学行为相同的优点。
[0090]
上述的对实施例的描述是为便于该技术领域的普通技术人员能理解和使用实用新型。熟悉本领域技术的人员显然可以容易地对这些实施例做出各种修改,并把在此说明的一般原理应用到其他实施例中而不必经过创造性的劳动。因此,本实用新型不限于上述实施例,本领域技术人员根据本实用新型的揭示,不脱离本实用新型范畴所做出的改进和修改都应该在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。