1.本技术涉及楼梯楼道清扫技术领域,尤其涉及一种伸缩式可自动爬楼梯的楼梯楼道清扫机器人。
背景技术:
2.随着经济的发展,高楼大厦林立,各种高楼大厦、阶梯教室、以及相应的走梯等建筑越来越常见,因为当遇到停电或者灾害时,楼梯的作用非常重要,因此楼道清洁的工作明显增加,这方面的市场需求应运而生。
3.如中国专利公开了:一种自适应楼梯爬升和清扫机器人,公开号:cn105835973a,本发明利用斜向电动伸缩杆和垂直电动伸缩杆实现了对层积折叠机构的长度和宽度可调,从而适应不同高度、不同宽度的楼梯,应用范围较广,但是在进行楼梯爬升的时候,机器人爬升腿的长度固定,楼梯踏步过高会影响到机器人的爬升,导致机器人无法进行攀爬。
技术实现要素:
4.本发明的目的在于提供一种伸缩式可自动爬楼梯的楼梯楼道清扫机器人,以解决上述背景技术中提出的问题。
5.本技术实施例采用下述技术方案:
6.一种伸缩式可自动爬楼梯的楼梯楼道清扫机器人,包括矩形连接板,所述矩形连接板上固定安装有吸尘器,所述吸尘器上固定安装有圆形套筒,所述圆形套筒内设置有进行攀爬的攀爬机构,所述攀爬机构包括电动机,所述电动机设置在圆形套筒内,所述电动机上活动安装有转轴,所述转轴的端部固定安装有两组三角转板,所述三角转板内活动安装有伸缩杆,所述伸缩杆的固定端固定安装有固定侧板,所述固定侧板上设有螺栓,所述固定侧板之间通过螺栓活动安装有转轮。
7.优选的,所述三角转板上设有控制三角转板和固定侧板之间距离的调控件,所述调控件包括套设内杆,所述套设内杆固定安装在转轴的端部,所述套设内杆的自由末端上固定安装有限位板,所述套设内杆上活动套设有固定套环,所述固定套环上固定安装有三组呈圆周分布的第一转动轴,所述固定侧板上也固定安装有第一转动轴,两个所述第一转动轴设置有传动杆。所述三角转板上设有对调控件进行固定的固定件。
8.优选的,所述三角转板上设有对调控件进行固定的固定件,所述固定件包括半圆凹槽,所述半圆凹槽开设在套设内杆上,所述半圆凹槽内活动安装有半圆滑块,所述半圆滑块上固定安装有挤压块和两组限位卡柱,且挤压块设置在限位卡柱之间,所述固定套环上开设有矩形活动槽和矩形安装槽,且矩形活动槽和矩形安装槽相连通,所述矩形活动槽内活动安装有第二转动轴,所述第二转动轴上活动套设有转动圆块,且第二转动轴为偏心设计,所述转动圆块上固定安装有把手,且转动圆块和挤压块相贴合,所述限位卡柱设置在转动圆块的两侧。
9.优选的,所述吸尘器上固定安装有吸尘器头,所述吸尘器头为两组抽风管对称组
合形成,所述圆形套筒和电动机之间设有进行固定的转动机构,所述转动机构包括转轴,所述转轴开设在圆形套筒的两侧,所述转轴的内侧壁上固定安装有限位弧形块,所述电动机外侧壁行开设有矩形凹槽,所述矩形凹槽内活动安装有矩形插块,所述电动机上活动套设有套环,所述矩形插块活动套设在套环上,且套环和矩形插块均设置在圆形套筒内。
10.本技术实施例采用的上述至少一个技术方案能够达到以下有益效果:
11.其一,在使用时,启动电动机,电动机的启动带动转轴的转动,转轴的转动带动三角转板的转动,三角转板和固定侧板通过伸缩杆进行连接,故三角转板的转动带动固定侧板的转动,固定侧板的转动带动转轮的转动,在进行楼梯攀登的时候,三角转板之间的空隙为楼梯踏步的距离,两组转轮在楼梯上留存,位于上方的一组转轮接触到上一阶楼梯,上方的一组转轮发力,将下方的转轮拉上去,转轮故转轴的转动可以带动三角转板、固定侧板和转轮在楼梯上进行攀登,攀登的效果较好,本装置通过转轴的转动带动三角转板、固定侧板和转轮的转动,从而实现对楼梯的攀登和下降,使用较为方便。
12.其二,通过拉动固定套环,让固定套环在套设内杆上进行移动,套设内杆上设有限位板对固定套环的移动进行限位,防止固定套环脱离轨迹,固定套环的移动带动第一转动轴的移动,第一转动轴的移动带动传动杆的位移,随着固定套环的移动,传动杆对螺栓施加压力,让固定侧板和转轮进行移动,将伸缩杆从三角转板中抽出来,实现对三角转板和固定侧板之间距离的改变,来适应对不同高度楼梯的攀登,本装置通过对固定套环的移动,带动三角转板和固定侧板之间的距离,方便对不同高度楼梯的攀登,提高本装置的使用范围。
13.其三,固定套环的移动带动转动圆块的移动,由于限位卡柱设置在矩形活动槽内,故转动圆块的移动带动矩形活动槽内限位卡柱的移动,限位卡柱的移动带动半圆滑块和挤压块在半圆凹槽内进行移动,这时候把手处于正常状态,不影响固定套环的移动,当固定套环移动到合适的位置后,转动把手,把手的转动带动转动圆块在矩形活动槽内绕第二转动轴进行转动,由于第二转动轴不处于转动圆块的中心位置,故转动圆块的进行转动的时候,转动圆块的较长端会给挤压块施加压力,让挤压块和半圆凹槽紧密贴合在一起,实现对固定套环的固定,本装置通过对固定套环的固定,实现对传动杆位置的固定,提高三角转板、固定侧板和转轮进行转动时的稳定性。
14.其四,在整个装置攀爬楼梯时,三角转板、固定侧板和转轮进行转动的时候,圆形套筒会在电动机上进行转动,矩形插块和套环在转轴内进行转动,限位弧形块对矩形插块的移动进行限位,防止电动机原地转动导致的整个装置侧翻,提高使用的稳定性,来适应楼梯的坡度,圆形套筒的移动带动矩形连接板、吸尘器和吸尘器头的移动,通过吸尘器和吸尘器头对楼梯上的灰尘进行吸附,在需要反向移动的时候,拉动矩形插块在矩形凹槽内进行移动,套环在电动机的外壳上进行移动,当矩形插块移除圆形套筒内后,转动矩形连接板、吸尘器和吸尘器头,将矩形连接板、吸尘器和吸尘器头反向转动,在将套环和矩形插块复位,方便仪器反向移动,本装置通过控制矩形连接板、吸尘器和吸尘器头的位置,实现了对仪器反向移动,方便仪器进行工作。
附图说明
15.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
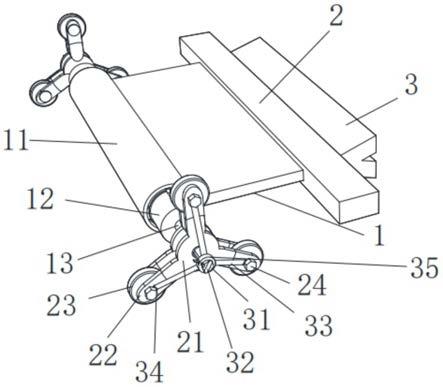
16.图1为本发明的正面结构示意图;
17.图2为本发明的侧面结构示意图;
18.图3为本发明转动机构的正面结构示意图;
19.图4为本发明转动机构的侧面结构示意图;
20.图5为本发明攀爬机构的结构示意图;
21.图6为本发明转轮的结构示意图;
22.图7为本发明固定件的结构示意图;
23.图8为本发明固定件的剖面结构示意图;
24.图9为本发明固定件的分解结构示意图。
25.图中:1、矩形连接板;2、吸尘器;3、吸尘器头;11、圆形套筒;12、电动机;13、转轴;14、限位弧形块;15、矩形凹槽;16、套环;17、矩形插块;21、三角转板;22、固定侧板;23、转轮;24、螺栓;25、伸缩杆;31、套设内杆;32、限位板;33、传动杆;34、第一转动轴;35、固定套环;41、半圆凹槽;42、矩形活动槽;43、转动圆块;44、把手;45、半圆滑块;46、挤压块;47、限位卡柱;48、矩形安装槽;49、第二转动轴。
具体实施方式
26.为使本技术的目的、技术方案和优点更加清楚,下面将结合本技术具体实施例及相应的附图对本技术技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
27.以下结合附图,详细说明本技术各实施例提供的技术方案。
28.请参阅图1
‑
图9,本发明提供一种技术方案:一种伸缩式可自动爬楼梯的楼梯楼道清扫机器人,包括矩形连接板1,矩形连接板1上固定安装有吸尘器2,吸尘器2上固定安装有圆形套筒11,圆形套筒11内设置有进行攀爬的攀爬机构,攀爬机构包括电动机12,电动机12设置在圆形套筒11内,电动机12上活动安装有转轴13,转轴13的端部固定安装有两组三角转板21,三角转板21内活动安装有伸缩杆25,伸缩杆25的固定端固定安装有固定侧板22,固定侧板22上设有螺栓24,固定侧板22之间通过螺栓24活动安装有转轮23。
29.在使用时,启动电动机12,电动机12的启动带动转轴13的转动,转轴13的转动带动三角转板21的转动,三角转板21和固定侧板22通过伸缩杆25进行连接,故三角转板21的转动带动固定侧板22的转动,固定侧板22的转动带动转轮23的转动,在进行楼梯攀登的时候,三角转板21之间的空隙为楼梯踏步的距离,两组转轮23在楼梯上留存,位于上方的一组转轮23接触到上一阶楼梯,上方的一组转轮23发力,将下方的转轮23拉上去,转轮23故转轴13的转动可以带动三角转板21、固定侧板22和转轮23在楼梯上进行攀登,攀登的效果较好,本装置通过转轴13的转动带动三角转板21、固定侧板22和转轮23的转动,从而实现对楼梯的攀登和下降,使用较为方便。
30.三角转板21上设有控制三角转板21和固定侧板22之间距离的调控件,调控件包括套设内杆31,套设内杆31固定安装在转轴13的端部,套设内杆31的自由末端上固定安装有限位板32,套设内杆31上活动套设有固定套环35,固定套环35上固定安装有三组呈圆周分布的第一转动轴34,固定侧板22上也固定安装有第一转动轴34,两个第一转动轴34设置有
传动杆33。三角转板21上设有对调控件进行固定的固定件。
31.通过拉动固定套环35,让固定套环35在套设内杆31上进行移动,套设内杆31上设有限位板32对固定套环35的移动进行限位,防止固定套环35脱离轨迹,固定套环35的移动带动第一转动轴34的移动,第一转动轴34的移动带动传动杆33的位移,随着固定套环35的移动,传动杆33对螺栓24施加压力,让固定侧板22和转轮23进行移动,将伸缩杆25从三角转板21中抽出来,实现对三角转板21和固定侧板22之间距离的改变,来适应对不同高度楼梯的攀登,本装置通过对固定套环35的移动,带动三角转板21和固定侧板22之间的距离,方便对不同高度楼梯的攀登,提高本装置的使用范围。
32.三角转板21上设有对调控件进行固定的固定件,固定件包括半圆凹槽41,半圆凹槽41开设在套设内杆31上,半圆凹槽41内活动安装有半圆滑块45,半圆滑块45上固定安装有挤压块46和两组限位卡柱47,且挤压块46设置在限位卡柱47之间,固定套环35上开设有矩形活动槽42和矩形安装槽48,且矩形活动槽42和矩形安装槽48相连通,矩形活动槽42内活动安装有第二转动轴49,第二转动轴49上活动套设有转动圆块43,且第二转动轴49为偏心设计,转动圆块43上固定安装有把手44,且转动圆块43和挤压块46相贴合,限位卡柱47设置在转动圆块43的两侧。
33.固定套环35的移动带动转动圆块43的移动,由于限位卡柱47设置在矩形活动槽42内,故转动圆块43的移动带动矩形活动槽42内限位卡柱47的移动,限位卡柱47的移动带动半圆滑块45和挤压块46在半圆凹槽41内进行移动,这时候把手44处于正常状态,不影响固定套环35的移动,当固定套环35移动到合适的位置后,转动把手44,把手44的转动带动转动圆块43在矩形活动槽42内绕第二转动轴49进行转动,由于第二转动轴49不处于转动圆块43的中心位置,故转动圆块43的进行转动的时候,转动圆块43的较长端会给挤压块46施加压力,让挤压块46和半圆凹槽41紧密贴合在一起,实现对固定套环35的固定,本装置通过对固定套环35的固定,实现对传动杆33位置的固定,提高三角转板21、固定侧板22和转轮23进行转动时的稳定性。
34.吸尘器2上固定安装有吸尘器头3,吸尘器头3为两组抽风管对称组合形成,圆形套筒11和电动机12之间设有进行固定的转动机构,转动机构包括转轴13,转轴13开设在圆形套筒11的两侧,转轴13的内侧壁上固定安装有限位弧形块14,电动机12外侧壁行开设有矩形凹槽15,矩形凹槽15内活动安装有矩形插块17,电动机12上活动套设有套环16,矩形插块17活动套设在套环16上,且套环16和矩形插块17均设置在圆形套筒11内。
35.在整个装置攀爬楼梯时,三角转板21、固定侧板22和转轮23进行转动的时候,圆形套筒11会在电动机12上进行转动,矩形插块17和套环16在转轴13内进行转动,限位弧形块14对矩形插块17的移动进行限位,防止电动机12原地转动导致的整个装置侧翻,提高使用的稳定性,来适应楼梯的坡度,圆形套筒11的移动带动矩形连接板1、吸尘器2和吸尘器头3的移动,通过吸尘器2和吸尘器头3对楼梯上的灰尘进行吸附,在需要反向移动的时候,拉动矩形插块17在矩形凹槽15内进行移动,套环16在电动机12的外壳上进行移动,当矩形插块17移除圆形套筒11内后,转动矩形连接板1、吸尘器2和吸尘器头3,将矩形连接板1、吸尘器2和吸尘器头3反向转动,在将套环16和矩形插块17复位,方便仪器反向移动,本装置通过控制矩形连接板1、吸尘器2和吸尘器头3的位置,实现了对仪器反向移动,方便仪器进行工作。
36.本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序
产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd
‑
rom、光学存储器等)上实施的计算机程序产品的形式。
37.还需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、商品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、商品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、商品或者设备中还存在另外的相同要素。
38.以上所述仅为本技术的实施例而已,并不用于限制本技术。对于本领域技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本技术的权利要求范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
