本实用新型涉及全自动竹子优选锯断机,它能够根据竹子的特征对竹子进行分选并同时对分选的竹子进行截断处理。
背景技术:
竹子根据其不同部位的结构不同,用途也不尽相同。一般是将竹子带有竹枝(开叉)部分和不带有竹枝的部分分开并分别进行截断处理。
现阶段竹子的锯断处理主要通过人工识别并再根据截断分离后的竹子长度分别进行截断处理。不但增加工人工作强度,而且工作效率低下。
技术实现要素:
本实用新型的目的在于:全自动竹子优选锯断机,能够根据竹子的特征对竹子进行分选并同时对竹子进行截断处理。
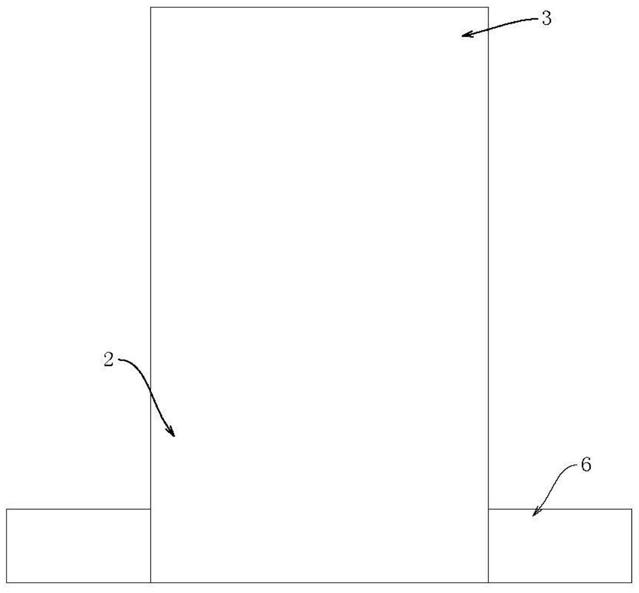
本实用新型通过如下技术方案实现:全自动竹子优选锯断机,它包括数控机构以及由前至后依序排列的竹子进料部1、竹子截断部2和竹子出料部3;
所述竹子送料部包括
传输机构,用于将竹子依其延伸方向由前至后传输;
图像采集机构,与数控机构连接并设置于传输机构上方,用于采集竹子结构;
所述竹子截断部2包括:
竹子夹持传动组件,沿前后方向设置两组以上且设置于传输机构后方;具体包括通过电机21驱动的主动滚筒22以及通过张紧件连接的被动滚筒23,主动滚筒22和被动滚筒23分设竹子两侧,所述电机21与数控机构连接并由数控机构控制;
锯片24,设置于滑移机构上且位于两组竹子夹持传动组件之间,所述滑移机构与数控机构连接并由数控机构控制;
竹子出料部3,设置于竹子夹持传动组件后方,为引导阶段竹子行进方向导向槽31或传输带。
较之前技术而言,本实用新型的有益效果为:
1、通过图像采集机构、数控机构以及各种动力装置的搭配,能够将竹子的分叉部分和无分叉部分进行识别并将二者分割,之后根据分开后两个部分的各自长度进行计算,并根据计算结构和所需长度进行进一步的切割。
附图说明
图1为本实用新型的整体结构示意图;
图2为竹子上料机构的侧视图;
图3为竹子上料机构和竹子进料部连接处的结构示意图;
图4为摄像头和位于和竹子进料部上竹子的位置关系图;
图5为竹子进料部的结构示意图;
图6为竹子进料部、竹子截断部、竹子出料部三者衔接处的结构示意图;
图7为竹子截断部的俯视图;
图8为主动滚筒以及被动滚筒相关部件的结构示意图;
图9为竹子出料部的结构示意图。
标号说明:1竹子进料部、11支架、12输送链、13托架、14摄像头、2竹子截断部、21电机、22主动滚筒、23被动滚筒、24锯片、25侧板、26张合架、27弹簧、28底座、29滑座、211限位杆、212导向孔、3竹子出料部、31导向槽、32储物架、33拨动板、4竹子上料机构、41支撑架、42送料链、43竹子放置架、44隔离杆。
具体实施方式
下面结合附图说明对本实用新型做详细说明:
如图1-9所示:全自动竹子优选锯断机,它包括数控机构以及由前至后依序排列的竹子进料部1、竹子截断部2和竹子出料部3;
如图3-5所示:所述竹子送料部包括;
传输机构,用于将竹子依其延伸方向由前至后传输;
图像采集机构,与数控机构连接并设置于传输机构上方,用于采集竹子结构;
如图6-8所示:所述竹子截断部2包括。
竹子夹持传动组件,沿前后方向设置两组以上且设置于传输机构后方;具体包括通过电机21驱动的主动滚筒22以及通过张紧件连接的被动滚筒23,主动滚筒22和被动滚筒23分设竹子两侧,所述电机21与数控机构连接并由数控机构控制;
锯片24,设置于滑移机构上且位于两组竹子夹持传动组件之间,所述滑移机构与数控机构连接并由数控机构控制;
如图9所示:竹子出料部3,设置于竹子夹持传动组件后方,为引导阶段竹子行进方向导向槽31或传输带。
这里数控机构并未出现在附图中,但是它与本申请的主要动力部分、输送机构都有连接,通过采集相关数据,对相关设备进行控制。数控机构相关技术为现有常规技术,它通过输入具体设备的参数,以实现各个设备之间的联动;故不再进行赘述。
具体数控机构与图像采集机构连接,获取竹子的具体样式;与电机21连接控制电机的启动,从而实现竹子的锯断以及控制何时实现锯断(控制竹子的长度)。
另外图1中出现的,如摄像头、竹子夹持传动组件等组件,虽然呈现悬空状态,但是实际上它们是配置有支架,为了更好的呈现它们的结构和位置关系故省略,同理,竹子出料部、锯片等是可以通过支架调节它们的高度,通过支架调节高度系常规做法,故上述省略竹子出料部、锯片的支架的说明,仅对竹子出料部、锯片的位置关系进行说明。
所述传输机构包括支架11、输送链12以及若干托架13,所述输送链12设置于支架11上并沿前后方向延伸,所述托架13布设于输送链12上。竹子与托架接触后,竹子将随着输送链12的行进方向向后运动。
所述图像采集机构为两个摄像头14,两个摄像头分设于竹子上方左右两侧,摄像头朝向竹子并与水平面呈45°夹角。这里的摄像头用于采集竹子的形状。以10米的竹子为例,一般竹子根部起向上5~6米的部分是没有分枝的,剩余的部分带有分枝,由于竹子的分枝为对称分布,所以只要摄像头能够区域竹子上半部分的图像,即可知道竹子分枝的起始点位于何处,之后控制主动滚筒22的启停和锯片的伸缩,实现竹子截断。
所述张紧件包括侧板25、两个内侧边同轴铰接于侧板25上的张合架26,设置于张合架26与侧板25之间的弹簧27,所述被动滚筒23转动连接于张合架26的外侧边。
如图8所示:为了避免弹簧的弯折,弹簧套设于限位杆211外,限位杆211的一端连接于张合架上,侧板25上开设有横向导向孔212,限位杆的另一端穿过导向孔212,这样弹簧在限位杆的作用下不会弯折。
所述主动滚筒22位于两个被动滚筒23之间。
所述滑移机构包括底座28、滑座29以及气缸,滑座29滑移设置于底座28上,所述气缸固定于底座28且气缸的伸缩端连接滑座29;所述锯片24固设于滑座29上,气缸与数控机构连接。
所述导向槽31的后部上方设有拨动件以及位于导向槽31两侧的储物架32;所述拨动件为由四个拨动板33连接形成的截面为x型的结构。通过顺时针或逆时针转动,将竹子进行分类。
需要说明的是,可以根据需求,设置多组拨动件,每组配置对应的储物架32。
如图2所示:它还包括竹子上料机构4,所述竹子上料机构4包括支撑架41、设置于支撑架41前后侧的送料链42以及竹子放置架43;在送料链42上设有若干等距分布的隔离杆44,所述隔离杆44之间的间距大于一个竹子的直径且小于两个竹子的直径;
竹子放置架43设置于送料链42的一侧,送料链42另一侧位于输送链12的前端。
这里送料链虽然呈前后布设,但是竹子一般长度较长,竹子的两端都会延伸出送料链,当送料链42将竹子送到输送链12的前端时,竹子的前端搭在托架13,托架直接将竹子向后输送。
其工作原理如下:
本实用新型主要实现两个功能,1判定竹子分枝部分和无分枝部分;2根据分枝部分和无分枝部分以及二者所需的长度,对两个部分切割出所需的指定长度。
举例而言,需要竹子分枝部分的长度规格为1m、1.5m两种规格,需要竹子未分枝部分的长度规格为2m、1.5m两种规格,图像采集系统获取到10米长的竹子中,竹子分枝部分和无分枝部分长度分别为4.3米和5.7米,则系统自动对两个部分进行截取,获取竹子分枝部分4根1m规格的竹段或者获取2根1.5m规格和1根1m规格的竹段,剩下0.3米竹段回收;获取竹子未分枝部分2根2m竹段以及1根1.5米竹段,剩下0.3米竹段回收。
需要说明的是,竹子的长度,可以根据传输机构的传输速度、主动滚筒的转速以及锯片的移动速度综合判定。
尽管本实用新型采用具体实施例及其替代方式对本实用新型进行示意和说明,但应当理解,只要不背离本实用新型的精神范围内的各种变化和修改均可实施。因此,应当理解除了受随附的权利要求及其等同条件的限制外,本实用新型不受任何意义上的限制。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。