1.本发明涉及控制技术领域,尤其涉及考虑通信受限的航天器编队有限时间轨道跟踪控制方法。
背景技术:
2.随着航天器技术的飞速发展,航天器编队飞行已经成为新的研究热点,相对于传统的大型单个航天器,由多个结构简单、成本低、研发周期短的小型航天器组成的编队航天器系统具有系统成本低、可靠性高和适应性和灵活性强等优势。在编队航天器的控制器设计中,收敛速度是一个重要的指标。随着编队航天器任务的日益复杂,对航天器编队控制系统的收敛速度和控制精度都提出了更高的要求。相对于渐近稳定控制,有限时间控制具有鲁棒性强、收敛速度块和抗干扰性强等优点,目前在编队航天器控制领域已经得到一定的应用。但是现有的有限时间控制方法多为基于滑模控制方法,这就不可以避免的存在奇异和不连续问题。为此,反步控制法与加幂积分方法被用于有限时间控制器的设计。但目前针对航天器编队轨道控制系统,还鲜有基于反步法与加幂积分方法的有限时间控制器的研究。
3.此外,随着网络控制技术的迅猛发展,目前网络控制技术已经被广泛的应用于航天工程系统、无人机系统、水下机器人系统、以及电力系统。在现代的航天器编队控制系统中,不同模块之间的通信采用无线网络进行。无线通信网络的采用可以有效的降低航天器的重量以及安装和维护成本,但也不可避免的带来一系列的问题,例如通信时延、数据丢包以及量化等。当控制器与执行机构之间通过无线网络对量化后的信息进行传输时,不可以避免的会引入量化误差,如果不能够有效地对量化误差进行处理必将导致系统控制性能的降低,甚至导致系统崩溃,对系统的控制精度和收敛速度带来新的挑战。因此有必要提出一种既能保证系统有限时间稳定,又尽可能的减少控制系统通信量,还能对系统外部扰动具有强鲁棒性的控制技术。
4.需要注意的是,本部分旨在为权利要求书中陈述的本发明的实施方式提供背景或上下文。此处的描述不因为包括在本部分中就承认是现有技术。
技术实现要素:
5.本发明的目的在于提供考虑通信受限的航天器编队有限时间轨道跟踪控制方法,进而至少在一定程度上克服由于相关技术的限制和缺陷而导致的一个或者多个问题。
6.本发明实施例提供考虑通信受限的航天器编队有限时间轨道跟踪控制方法,该方法包括:
7.建立航天器编队相对轨道模型;
8.建立磁滞量化器模型,采用磁滞量化器对航天器编队相对轨道模型中的从航天器的控制输入信号进行量化;
9.为了便于进行控制器的设计,定义中间变量;
10.中间变量定义后,基于反步法和加幂积分技术,进行虚拟控制器的设计;
11.基于中间变量和虚拟控制器的设计,获得考虑通信受限的航天器编队有限时间轨道跟踪控制器。
12.本发明的实施例中,所述航天器编队相对轨道模型为航天器编队飞行的误差相对运动动力学模型,且所述航天器编队飞行的误差相对运动动力学模型为:
[0013][0014]
其中,位置跟踪误差e1(t)和速度跟踪误差e2(t)的定义分别如下;
[0015]
e1(t)=q1(t)
‑
q
1d
=[e
11
,e
12
,e
13
]
t
,e2(t)=q2(t)
‑
q
2d
=[e
21
,e
22
,e
23
]
t
ꢀꢀ
(2)
[0016]
其中,q1(t)=[x,y,z]
t
表示在轨道坐标系下从航天器相对于主航天器的相对位置向量,表示在轨道坐标系下从航天器相对于主航天器的相对速度向量,x,y,z表示从航天器相对于主航天器的位置信息在轨道坐标系x,y,z轴上的分量,表示从航天器相对于主航天器的速度信息在轨道坐标系x,y,z轴上的分量,q
1d
=[x
d
,y
d
,z
d
]
t
表示期望跟踪位置状态,表示期望跟踪速度状态,x
d
,y
d
,z
d
表示从航天器期望跟踪的位置信息在轨道坐标系x,y,z轴上的分量,表示从航天器期望跟踪的速度信息在轨道坐标系x,y,z轴上的分量;e
11
,e
12
,e
13
表示从航天器相对位置跟踪误差在轨道坐标系x,y,z轴上的分量,e
21
,e
22
,e
23
表示从航天器相对速度跟踪误差在轨道坐标系x,y,z轴上的分量;u(t)=(u1,u2,u3)
t
表示从航天器的控制输入,w(t)=(w1,w2,w3)
t
表示外部扰动,u1,u2,u3表示从航天器的控制输入在轨道坐标系x,y,z轴上的分量,w1,w2,w3表示外部扰动在轨道坐标系x,y,z轴上的分量;
[0017]
非线性方程的定义为:
[0018][0019]
其中,x,y,z表示在轨道坐标系下从航天器相对于主航天器的位置信息在x,y,z轴上的分量,表示期望跟踪速度的导数在轨道坐标系x,y,z轴上的分量,μ表示地球引力常数,u1,u2,u3表示从航天器的控制输入在轨道坐标系x,y,z轴上的分量,u
l1
,u
l2
,u
l3
表示主航天器的控制输入在轨道坐标系x,y,z轴上的分量,m
l
表示主航天器的质量,m
f
表示从航天器的质量,r=(0,r,0)
t
表示主航天器本体坐标系相对于惯性坐标系的位置相量,n表示主航天器的轨道角速度,表示主航天器轨道角速度的导数,r表示主航天器本体坐标
系相对于惯性坐标系的位置相量在y轴上的分量。
[0020]
本发明的实施例中,采用磁滞量化器对航天编队相对轨道模型中的从航天器的控制输入信号进行量化,建立的磁滞量化器模型为:
[0021][0022]
其中,u
ik
=ρ
(1
‑
k)
u
min
,k=1,2,...n,u
min
>0,0<ρ<1,
[0023]
本发明的实施例中,为了便于后续进行控制器的设计,将磁滞量化器的模型进行分解,所述磁滞量化器的模型分解为如下形式:
[0024]
q(u
i
)=φ
i
(t)u
i
d
i
(t)
ꢀꢀ
(5)
[0025]
其中φ
i
(t)和d
i
(t)为非线性函数,且非线性φ
i
(t)和d
i
(t)满足以下不等式:
[0026]1‑
η≤φ
i
(t)≤1 η,|d
i
(t)|≤u
min
。
ꢀꢀ
(6)
[0027]
本发明的实施例中,为了便于进行控制器的设计,定义中间变量,所述中间变量分别定义如下:
[0028][0029]
其中,α1=1,0<α2=1 τ<1,τ<0,σ
1i
和σ
2i
为虚拟控制器,e
1i
和e
2i
分别表示位置跟踪误差和速度跟踪误差。
[0030]
本发明的实施例中,中间变量定义后,基于反步法和加幂积分技术,进行虚拟控制器的设计,得到虚拟控制器
[0031][0032]
本发明的实施例中,通过所设计的中间变量和虚拟控制器获得考虑通信受限的航天器编队有限时间轨道跟踪控制器,所述控制器的设计如下所示:
[0033][0034]
其中的自适应律为:
[0035][0036]
其中,l
i
>0和μ
i
>0,i=1,2,3。
[0037]
本发明的实施例提供的技术方案可以包括以下有益效果:
[0038]
本发明的一种实施例中,通过上述具有自适应律的有限时间跟踪控制方法,在建立航天器编队相对轨道模型的基础上,采用磁滞量化器对航天器编队相对轨道模型中的从航天器的控制输入信号进行量化,降低通信速率并防止对数量化器引起的振荡;该控制方法可以确保编队航天器轨道在有限时间内实现对期望轨道的跟踪,采用反步法和加幂积分技术可以避免传统采用滑模控制方法设计有限时间控制器时的奇异和不连续问题;对于航天器编队轨道系统存在的外部扰动和由量化器引入的量化误差,本发明提出的基于模糊控制的自适应律可以对其进行自主的估计与补偿,保证跟踪误差的有限时间稳定;在有限时间跟踪控制器设计时,通过磁滞量化器的引入,不仅可以确保误差跟踪系统在有限时间内稳定,而且有效地减轻了控制系统的通信负载。
附图说明
[0039]
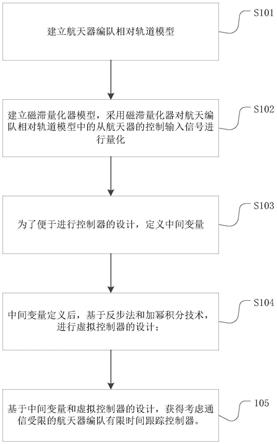
图1示出本发明示例性实施例中考虑通信受限的航天器编队有限时间轨道跟踪控制方法的流程图;
[0040]
图2示出本发明示例性实施例中u
i
>0时的磁滞量化器q(u
i
);
[0041]
图3示出本发明示例性实施例中位置跟踪误差曲线图;
[0042]
图4示出本发明示例性实施例中速度跟踪误差曲线图;
[0043]
图5示出本发明示例性实施例中控制输入曲线图;
[0044]
图6示出本发明示例性实施例中量化的控制输入曲线;
[0045]
图7示出本发明示例性实施例中自适应参数曲线图。
具体实施方式
[0046]
现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的范例;相反,提供这些实施方式使得本发明将更加全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。所描述的特征、结构或特性可以以任何合适的方式结合在一个或更多实施方式中。
[0047]
此外,附图仅为本发明的示意性图解,并非一定是按比例绘制。图中相同的附图标记表示相同或类似的部分,因而将省略对它们的重复描述。附图中所示的一些方框图是功能实体,不一定必须与物理或逻辑上独立的实体相对应。
[0048]
本示例实施方式中首先提供了一种具有自适应律的有限时间跟踪控制方法。参考图1中所示,该方法可以包括:
[0049]
步骤s101:建立航天器编队相对轨道模型;
[0050]
步骤s102:建立磁滞量化器模型,采用磁滞量化器对航天器编队相对轨道模型中的从航天器的控制输入信号进行量化;
[0051]
步骤s103:为了便于进行控制器的设计,定义中间变量;
[0052]
步骤s104:中间变量定义后,基于反步法和加幂积分技术,进行虚拟控制器的设计;
[0053]
步骤s105:基于中间变量和虚拟控制器的设计,获得考虑通信受限的航天器编队有限时间轨道跟踪控制器。
[0054]
具体的,所述航天器编队相对轨道模型为航天器编队飞行的误差相对运动动力学
模型,且所述航天器编队飞行的误差相对运动动力学模型为:
[0055][0056]
其中,位置跟踪误差e1(t)和速度跟踪误差e2(t)的定义分别如下;
[0057]
e1(t)=q1(t)
‑
q
1d
=[e
11
,e
12
,e
13
]
t
,e2(t)=q2(t)
‑
q
2d
=[e
21
,e
22
,e
23
]
t
ꢀꢀ
(2)
[0058]
其中,q1(t)=[x,y,z]
t
表示在轨道坐标系下从航天器相对于主航天器的相对位置向量,表示在轨道坐标系下从航天器相对于主航天器的相对速度向量,x,y,z表示从航天器相对于主航天器的位置信息在轨道坐标系x,y,z轴上的分量,表示从航天器相对于主航天器的速度信息在轨道坐标系x,y,z轴上的分量,q
1d
=[x
d
,y
d
,z
d
]
t
表示期望跟踪位置状态,表示期望跟踪速度状态,x
d
,y
d
,z
d
表示从航天器期望跟踪的位置信息在轨道坐标系x,y,z轴上的分量,表示从航天器期望跟踪的速度信息在轨道坐标系x,y,z轴上的分量;e
11
,e
12
,e
13
表示从航天器相对位置跟踪误差在轨道坐标系x,y,z轴上的分量,e
21
,e
22
,e
23
表示从航天器相对速度跟踪误差在轨道坐标系x,y,z轴上的分量;
[0059]
u(t)=(u1,u2,u3)
t
表示从航天器的控制输入,w(t)=(w1,w2,w3)
t
表示外部扰动,u1,u2,u3表示从航天器的控制输入在轨道坐标系x,y,z轴上的分量,w1,w2,w3表示外部扰动在轨道坐标系x,y,z轴上的分量;
[0060]
非线性方程的定义为:
[0061][0062]
其中,x,y,z表示在轨道坐标系下从航天器相对于主航天器的位置信息在x,y,z轴上的分量,表示期望跟踪速度的导数在轨道坐标系x,y,z轴上的分量,μ表示地球引力常数,u1,u2,u3表示从航天器的控制输入在轨道坐标系x,y,z轴上的分量,u
l1
,u
l2
,u
l3
表示主航天器的控制输入在轨道坐标系x,y,z轴上的分量,m
l
表示主航天器的质量,m
f
表示从航天器的质量,r=(0,r,0)
t
表示主航天器本体坐标系相对于惯性坐标系的位置相量,n表示主航天器的轨道角速度,表示主航天器轨道角速度的导数,r表示主航天器本体坐标系相对于惯性坐标系的位置相量在y轴上的分量。
[0063]
定义:如果存在和对于e(0)=e0,那么系统(3)是有限时间
稳定的,则对于t≥t
r
有
[0064]
假设期望状态q
1d
和q
2d
是有界的,并且假设它们的一阶和二阶时间导数都是有界的。
[0065]
引理1:对于x
i
∈r,i=1,...,m,q>1,则有
[0066][0067][0068]
引理2:对于q≥1,则有
[0069]
|y z|
q
≤2
q
‑1|sig
q
(y) sig
q
(z)|
ꢀꢀ
(13)
[0070]
|y
‑
|
q
≤2
q
‑1|sig
q
(y)
‑
sigq(z)|
ꢀꢀ
(14)
[0071]
引理3:令α和β都为正常数,且是一个真实数值函数方程,则有
[0072][0073]
本实施例中主要研究的是航天器编队相对轨道模型,即为航天器编队飞行的误差相对运动动力学模型,具体的,航天器编队飞行的误差相对运动动力学模型为上述公式(1),其中涉及的非线性方程可由航天器编队飞行的非线性相对运动动力学方程得到,具体的,航天器编队飞行的非线性相对运动动力学方程如下公式(16)。
[0074]
在lvlh坐标系中,航天器编队飞行的非线性相对运动动力学方程为:
[0075][0076]
步骤s102:采用所述磁滞量化器对所述航天编队相对轨道模型中的从航天器的控制输入信号进行量化,建立的所述磁滞量化器模型为:
[0077][0078]
其中,u
ik
=ρ
(1
‑
k)
u
min
,k=1,2,...n,u
min
>0,0<ρ<1,图2为u
i
>0时的磁滞量化器q(u
i
)图。
[0079]
在有限时间跟踪控制器设计时,通过磁滞量化器的引入,不仅可以确保误差跟踪系统在有限时间内稳定,而且有效地减轻了控制系统的通信负载。
[0080]
为了便于后续进行控制器的设计,将步骤s102中的磁滞量化器的模型进行分解,所述磁滞量化器q(u
i
)可以分解为如下形式:
[0081]
q(u
i
)=φ
i
(t)u
i
d
i
(t)
ꢀꢀ
(5)
[0082]
其中φ
i
(t)和d
i
(t)为非线性函数且满足引理4的性质。
[0083]
引理4:1
‑
η≤φ
i
(t)≤1 η,|d
i
(t)|≤u
min
ꢀꢀ
(6)
[0084]
在步骤s103中:为了便于进行控制器的设计,定义中间变量,所述中间变量分别定义如下:
[0085][0086]
其中,α1=1,0<α2=1 τ<1,τ<0,σ
1i
和σ
2i
为虚拟控制器。
[0087]
基于反步法和加幂积分技术,进行步骤s104,基于中间变量,得到虚拟控制器:
[0088][0089]
在步骤s105中:基于中间变量和虚拟控制器的设计,获得考虑通信受限的航天器编队有限时间轨道跟踪控制器,所述控制器的设计如下所示:
[0090][0091]
其中的自适应律为:
[0092][0093]
其中,l
i
>0和μ
i
>0,i=1,2,3。
[0094]
基于上述分析,本实施例的主要结果如下:
[0095]
考虑航天器编队相对轨道模型公式(1),采用磁滞量化器(4),如果设计的控制器
为公式(9)且自适应律为(10),则跟踪误差e
1i
和e
2i
,i=1,2,3将在有限时间内收敛到期望的原点邻域内。
[0096]
证明:
[0097]
第一步:设计如下形式的lyapunov函数
[0098][0099]
把虚拟控制器σ
1i
=0代入上式,v1的导数如下:
[0100][0101]
然后应用引理1到3,得出
[0102][0103]
其中,为正常数,根据虚拟控制器
[0104][0105]
将公式(18)和公式(19)代入公式(17)
[0106][0107]
第二步:设计如下形式的lyapunov函数
[0108][0109]
其中,
[0110]
的时间导数为
[0111][0112]
注意
[0113][0114]
根据公式(24),得出
[0115][0116]
将(25)代入v的时间导数,得出
[0117][0118]
将公式(9)代入(26)得到
[0119][0120]
当时,公式(27)可写成如下形式:
[0121][0122]
为了便于下一步计算,引入模糊逻辑系统,模糊逻辑系统的简写记为flss,flss的如果
‑
则规则构造如下:
[0123]
r
l
:如果x1是x2是
…
,和x
n
是则y是
ꢀꢀ
(29)
[0124]
其中,flss的输入,是flss的输出,和分
别是隶属函数和相关联的模糊基,m=1,2,...,k,k是规则的数量,flss的表达式为:
[0125][0126]
其中,模糊基函数的表达式为:
[0127][0128]
令λ
t
=[λ1,λ2,...,λ
n
]和基于公式(31),得到ξ
t
(x)ξ(x)<1,然后基于(30)和(30),得到
[0129]
y(x)=λ
t
ξ(x)
ꢀꢀ
(32)
[0130]
当隶属函数是高斯函数时,得到以下性质。
[0131]
引理5:如果f(x)定义为紧凑集ω的连续定义函数,则对于任一个正常数ε
*
>0,flss满足以下等式:
[0132][0133]
其中,λ
*
是最优参数向量。
[0134]
需要说明的是,flss因其良好的逼近能力用于处理非线性控制系统的不确定性,flss用于逼近
[0135]
公式(28)中通过使用引理5中flss的逼近能力,得出
[0136][0137]
方便起见,写成
[0138][0139]
其中,是最优模糊权重向量,|ε1|≤ε
*
,且是一个正常数,是一个正常数,根据引理1到3,以及备注的则有
[0140][0141]
其中,l
i
>0是一个正的设计参
数,
[0142]
将公式(10)和公式(36)代入公式(28),得到的估计值ψ
i
[0143][0144]
令则有
[0145][0146]
令且根据引理1,则有
[0147][0148]
根据v和的定义,可以得到
[0149][0150]
根据公式(38)和公式(39),则有
[0151][0152]
而且,应用引理3,
[0153][0154]
[0155]
其中,则有
[0156][0157]
其中,从公式(44)中可以得出,如果得出这意味着v<0在集合外。因此,可以得出结论,v在有限时间内到达该集合,此外,跟踪误差e
1i
和e
2i
,i=1,2,3将在有限时间内收敛到期望的原点邻域内。
[0158]
下面结合具体仿真实例,进一步阐述本实施例。
[0159]
本发明以双星编队航天器系统为仿真对象,假设主航天器和从航天器的质量分别为m
l
=1kg,m
f
=1kg,假设主航天器的轨道为圆轨道且轨道半径为6728km。设定控制输入u
i
(t)最大值为2n,i=1,2,3。假设从航天器的初始状态为q
10
=[250,
‑
50,0]m和q
20
=[0,0,0]m/s,外部扰动为控制器和自适应律的参数设置为l
i
=0.5,u
i
=0.5,α1=1,磁滞量化器的参数设置为ρ=0.4,u
min
=0.000001。
[0160]
请参考图3到图7,当航天器编队轨道控制系统存在外部扰动和通信受限时,本发明所提出的基于控制输入量化的有限时间轨道跟踪控制方案不仅可以有效的减轻控制系统的通信负载,还可以确保在有限时间内实现对期望状态的跟踪控制。
[0161]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。此外,本领域的技术人员可以将本说明书中描述的不同实施例或示例进行接合和组合。
[0162]
本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本发明的其它实施方案。本技术旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本发明未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本发明的真正范围和精神由所附的权利要求指出。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。