一种改进的无模型系统的pid控制器参数整定方法
技术领域
1.本发明属于工业控制技术领域,尤其涉及一种改进的无模型系统的pid控制器参数整定方法。
背景技术:
2.对于机械系统而言,其动力学方程一般遵循牛顿运动定律,可以用二阶系统进行描述——例如无人机/无人车等控制系统。但被控对象的数学模型一般都经过了简化和线性化,与实际产品可能存在较大的差异。而且,还可能受到外界或者系统内部的未知的未建模干扰影响。在实际pid控制器参数整定和控制器设计中,有必要考虑因简化和线性化而缺失的未建模部分对控制系统的影响。同时,外界未知干扰对被控对象的影响也需要考虑。
技术实现要素:
3.针对现有技术中的上述不足,本发明提供的一种改进的无模型系统的pid 控制器参数整定方法,以解决被控对象的数学模型不准确或存在较强非线性情况下的控制器参数整定问题。
4.为了达到以上目的,本发明采用的技术方案为:
5.本方案提供一种改进的无模型系统的pid控制器参数整定方法,包括以下步骤:
6.s1、给定pid控制器的初步微分增益并根据所述初步微分增益取pid 控制器的初步比例增益的值,其中,
7.s2、给定pid控制器的全局缩放系数n
s
和积分增益缩放系数n
i
,其中,n
s
≥1、
8.s3、根据所述初步微分增益初步比例增益积分增益缩放系数n
i
以及全局缩放系数n
s
,分别计算得到pid控制器的微分增益、比例增益和积分增益;
9.s4、基于所述pid控制器的微分增益、比例增益和积分增益初始运行被控系统,并查看被控系统的响应误差曲线;
10.s5、结合被控系统的响应误差曲线以及系统预期的瞬态响应超调量σ%、稳态误差e
s
%和响应时间t
r
,调整所述全局缩放参数、积分增益缩放参数、初步微分增益及初步比例增益;
11.s6、根据调整结果,判断响应误差曲线是否满足预设的条件,若是,则完成对pid控制器参数的整定,否则,返回步骤s3。
12.本发明的有益效果是:本发明提出了针对二阶系统采用pid控制器时的一种改进的参数整定方法,不但适用于已知/未知线性系统的pid控制器参数整定,而且适用于未知非线性系统的pid控制器参数整定。可以快速便捷地应对系统中未知的线性或者非线性建模部分在参数整定时的不确定性。
13.进一步地,所述步骤s1中取pid控制器的比例增益的表达式如下:
[0014][0015]
其中,表示pid控制器的初步比例增益,ξ为无量纲常数,其初始值可设为1,用于调整初步比例增益的值,表示pid控制器的初步微分增益。
[0016]
再进一步地,所述步骤s2中pid控制器的微分增益、比例增益和积分增益的表达式如下:
[0017][0018]
其中,k
p
表示pid控制器的比例增益,k
d
表示pid控制器的微分增益,k
i
表示pid控制器的积分增益,表示pid控制器的初步比例增益,表示pid 控制器的初步微分增益,n
s
表示pid控制器的全局缩放系数,n
i
表示pid控制器的积分增益缩放系数。
[0019]
上述进一步方案的有益效果是:拆解了pid控制器的比例增益、微分增益和积分增益与被控系统预期的瞬态响应超调量σ%、稳态误差e
s
%和响应时间t
r
的关系,便于pid控制器参数的快速整定。
[0020]
再进一步地,所述步骤s5包括以下几种方式:
[0021]
第一种方式:
[0022]
当需减少响应误差曲线的超调量σ%时,则增加积分增益缩放参数n
i
的值,当需增加响应误差曲线的超调量σ%时,则减小积分增益缩放参数n
i
的值;
[0023]
第二种方式:
[0024]
当需降低被控系统的稳态误差e
s
%时,则增加初步微分增益或全局缩放参数n
s
的值,当需增加被控系统的稳态误差e
s
%时,则减小初步微分增益或全局缩放参数n
s
的值,同时基于初步比例增益的表达式调整初步比例增益其中,ξ=1;
[0025]
第三种方式:
[0026]
当需减少被控系统的响应时间t
r
时,则增加初步微分增益和/或全局缩放参数n
s
的值,当需增加被控系统的响应时间t
r
时,则减少初步微分增益的值或局缩放参数n
s
的值,同时基于初步比例增益的表达式调整初步比例增益其中,ξ=1。
[0027]
上述进一步方案的有益效果是:明确了被控系统的瞬态响应超调量σ%、稳态误差e
s
%和响应时间t
r
与所述的全局缩放参数、积分增益缩放系数、初步微分增益及初步比例增益的关系和调整方法,实现对已知/未知的线性/非线性被控系统的符合预期的响应性能的pid控制器参数的快速整定。
附图说明
[0028]
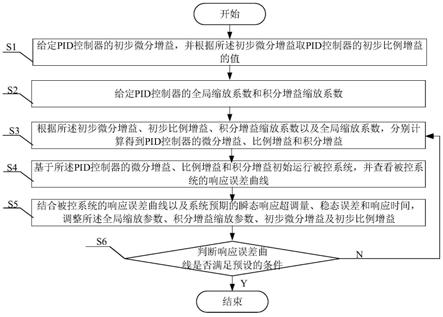
图1为本发明的方法流程图。
[0029]
图2为本实施例中示例1的pid控制仿真结果图。
[0030]
图3为本实施例中示例2的pid控制仿真结果图。
[0031]
图4为本实施例中示例3的pid控制仿真结果图。
具体实施方式
[0032]
下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
[0033]
实施例
[0034]
以被控对象为二阶系统并受到干扰为例,被控对象可用如下数学模型进行描述:
[0035][0036]
其中,f0是系统的已知建模部分,使用pid控制器时,其控制律模型如下:
[0037][0038]
其中,参数k
p
,k
i
,k
d
的关系是设计pid控制律的关键。因此采用pid控制器时存在两个问题,1)整定参数不容易实现系统的稳定;2)获得期望的瞬态控制性能和稳态误差需要耗费大量的时间进行参数试错。本发明针对上述问题提出了一种控制对象为二阶系统的pid参数快速整定方法,不但适用于已知/未知线性系统的pid控制器参数整定,而且适用于未知非线性系统的pid控制器参数整定。如图1所示,本发明提供了一种改进的无模型系统的pid控制器参数整定方法,其实现方法如下:
[0039]
s1、给定pid控制器的初步微分增益并根据所述初步微分增益取pid 控制器的比例增益的值,其中,其中取pid控制器的比例增益的表达式如下:
[0040][0041]
其中,表示pid控制器的初步比例增益,ξ为无量纲常数,其初始值可设为1,用于调整初步比例增益的值,表示pid控制器的初步微分增益,即,取初步比例增益约为初步微分增益平方的1/4倍左右。
[0042]
s2、给定pid控制器的全局缩放系数n
s
和积分增益缩放系数n
i
,其中,n
s
≥1、
[0043]
s3、根据所述初步微分增益初步比例增益积分增益缩放系数n
i
以及全局缩放系数n
s
,分别计算得到pid控制器的微分增益、比例增益和积分增益,其中,pid控制器的微分增益、比例增益和积分增益的表达式如下:
[0044][0045]
其中,k
p
表示pid控制器的比例增益,k
d
表示pid控制器的微分增益,k
i
表示pid控制器的积分增益,表示pid控制器的初步比例增益,表示pid 控制器的初步微分增益,n
s
表示pid控制器的全局缩放系数,n
i
表示pid控制器的积分增益缩放系数;
[0046]
s4、基于所述pid控制器的微分增益、比例增益和积分增益初始运行被控系统,并查看被控系统的响应误差曲线;
[0047]
本实施例中,初始运行被控系统,观察阶跃响应或者其他响应,并查看系统响应误差曲线。
[0048]
s5、结合被控系统的响应误差曲线以及系统预期的瞬态响应超调量σ%、稳态误差e
s
%和响应时间t
r
,调整所述全局缩放参数、积分增益缩放参数、初步微分增益及初步比例增益,其包括以下几种方式:
[0049]
第一种方式:
[0050]
当需减少响应误差曲线的超调量σ%时,则增加积分增益缩放参数n
i
的值,当需增加响应误差曲线的超调量σ%时,则减小积分增益缩放参数n
i
的值;
[0051]
第二种方式:
[0052]
当需降低被控系统的稳态误差e
s
%时,则增加初步微分增益或全局缩放参数n
s
的值,当需增加被控系统的稳态误差e
s
%时,则减小初步微分增益或全局缩放参数n
s
的值,同时基于初步比例增益的表达式调整初步比例增益其中,ξ=1;
[0053]
第三种方式:
[0054]
当需减少被控系统的响应时间t
r
时,则增加初步微分增益和/或全局缩放参数n
s
的值,当需增加被控系统的响应时间t
r
时,则减少初步微分增益的值或局缩放参数n
s
的值,同时基于初步比例增益的表达式调整初步比例增益其中,ξ=1。
[0055]
需要说明的是上述三种方式没有先后之分,均可视情况进行选择。
[0056]
本实施例中,按照pid控制器参数取值规则,适当地增加或减少积分增益缩放参数n
i
,以减少或增加pid控制的系统瞬态响应超调量σ%。
[0057]
本实施例中,按照pid控制器参数以及比例增益取值规则,适当地增加或减少初步微分增益或全局缩放参数n
s
≥1,以减少或增加系统的稳态误差e
s
%。
[0058]
本实施例中,按照控制器参数以及比例增益取值规则,适当地增加或减少初步微分增益或全局缩放参数n
s
≥1,以减少或增加系统的响应时间t
r
。
[0059]
s6、根据调整结果,判断被控系统的响应误差曲线是否满足预设的条件,若是,则完成对pid控制器参数的整定,否则,返回步骤s3。
[0060]
本实施例中,步骤s5所述的调整所述全局缩放参数、积分增益缩放参数、初步微分增益及初步比例增益,可在步骤s6判断比较后再进行调整。
[0061]
综上,本方法包括拆解pid控制器的比例增益、微分增益和积分增益为初步微分增益、初步比例增益、积分增益缩放系数和全局缩放系数的组合形式,具体为给定pid控制器的初步微分增益,并取pid控制器的初步比例增益的值;给定pid控制器的全局缩放系数和积分增益缩放系数,以确定无模型系统的pid 控制器参数(比例增益、微分增益和积分增益)的值;初始运行阶跃输入信号的被控系统,并根据响应误差曲线以及系统预期的瞬态响应超调量σ%、稳态误差e
s
%和响应时间t
r
相应地调整pid控制器的积分增益缩放系数、初步微分增益和/或全局缩放参数,完成对pid控制器参数整定。本发明不但适用于已知/未知线性系统的pid控制器参数整定,而且适用于未知非线性系统的pid控制器参数整定。
[0062]
下面结合示例对本发明作进一步的说明。
[0063]
示例1
[0064]
某控制对象的二阶系统数学模型如下:
[0065][0066]
其中,未知干扰项为w2(t)=1.5sin(0.5t)。使用如表1所示 5组pid参数进行整定,结果见图2,图2为pid控制仿真结果图,其中,图2 (b)pid控制仿真结果的局部放大图。
[0067]
表1
[0068][0069]
示例2
[0070]
某控制对象(考虑地面效应的无人机高度控制)的二阶系统数学模型如下:
[0071][0072]
其中,r=0.20为螺旋桨直径;z
r
=0.32 x1为螺旋桨离地高度;ρ=8.4为与无人机结构有关的待定参数。使用如表2所示的6组pid参数进行整定,结果见图3,其中,图3(b)为pid控制仿真结果局部放大图。
[0073]
表2
[0074][0075][0076]
示例3
[0077]
某控制对象(考虑地面效应的无人机高度控制)的二阶系统数学模型如下:
[0078][0079]
其中,r=0.20为螺旋桨直径;z
r
=0.32 x1为螺旋桨离地高度;ρ=8.4为与无人机结构有关的待定参数。未知干扰项为w2(t)=1.5sin(0.5t),且传感器有白噪音,使用如表3所示的6组pid参数进行整定,结果见图4,其中,图4(b)为pid控制仿真结果局部放大图。
[0080]
表3
[0081][0082]
本实施例中,某控制对象(考虑地面效应的无人机高度控制)的二阶系统数学模型如下:
[0083]
[0084]
其中,r=0.20为螺旋桨直径;z
r
=0.32 x1为螺旋桨离地高度;ρ=8.4为与无人机结构有关的待定参数。未知干扰项为 w2(t)=1.5sin(0.5t),且传感器有白噪音。如果上述模型已知部分内容,且传感器有白噪音。其中,
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。