1.本发明涉及列车控制技术领域,具体涉及一种气囊型受电弓弓网接触力补偿控制方法及装置。
背景技术:
2.近年来,国内高铁的时速持续提高。随着其飞速发展,高铁受电弓与接触网保持良好接触的问题变得愈发严重。受电弓通过与接触网接触获得动车组的电能。随着列车速度的增加和操作环境的变化,由于阻力、升力变化或自身震动,受电弓受流会受到较大影响。目前,如何保证动车组良好的受流质量,已经成为高速铁路技术的重要环节。在特殊运行环境下保持良好的弓网特性,对受电弓的主动控制研究提出了更高的要求。
3.为了确保牵引电流的顺畅流动,受电弓和接触网之间必须有一定的预接触力。如果预接触力太小,会增加离线率,使受电弓受流质量变差,并产生电弧放电烧蚀弓头降低受电弓寿命;反之,会使滑板和接触线间产生较大的机械磨损,同样会降低受电弓寿命,这都意味着高昂的维护成本。
4.机车的受流质量评估是整个受电弓系统性能评估的重要组成部分。改善电流质量是受电弓控制的最终目标。根据当前的情况,不同的国家采用不同的方法。德国在受电弓系统的基础研究方面比较全面,认为应从静态弹性、弹性不均和弓网离线速度考虑当前性能,在检测技术和测试评估上都很优秀。日本新干线使用多个受电弓将悬链线与高弹性和小波动传播速度匹配,这会导致剧烈振动,弓网离线率高,接触线磨损比较严重,并且噪声相对较高。在噪音等方面,主要评估脱机速度,升程量和接触线的应力。法国发现机车在高速运行过程中受电弓的空气动力阻力增加,因此,研究重点在于抬升力,接触线应力和悬挂方式的优化方法。
5.目前,参考文献[1]研究了通过调整脉冲宽度控制气缸内压强来控制弓网接触力;参考文献[2]提出可以通过液压机构控制弓网接触力;参考文献[3]采用电磁操动方式控制弓网接触力;参考文献[4]通过某种线性机构加之伺服电机控制弓网接触力等。但是,加装电机虽然反应较快但是容易受到电磁扰,液压缸或者气缸由于体积较大安装在受电弓底部,虽然通过控制液压或者气压易于实施,但是响应时间较长,不能达到实时控制的效果。
[0006]
当列车进出隧道时,列车及受电弓附近的流场会发生较大变化,因此作用在受电弓上的力会发生突变,如果不进行补偿,弓头若压紧电网会造成磨损加剧;弓头若松离电网,会造成电弧放电,烧蚀弓头,都会降低弓头的使用寿命。因此,需要研究受电弓弓网接触力的补偿控制。
[0007]
参考文献:
[0008]
[1]吴赟松,吴学杰.多功能协调式液压控制系统[j].工程与试验,2013(s1):6
‑
9 30.
[0009]
[2]tieri r.innovative active control strategies for pantograph catenary interaction[j].2012.
[0010]
[3]carnevale m,facchinetti a,maggiori l,et al.computational fluid dynamics as a means of assessing the influence of aerodynamic forces on the mean contact force acting on a pantograph[j].proceedings of the institution of mechanical engineers part f journal of rail and rapid transit,2015,230(7):733
‑
738.
[0011]
[4]balestrino a,bruno o,landi a,et al.active controlsand nominvasive monitoring for high speed trains[c]//zitek p.proceedings of 16th ifac world congress.prague:ifac,2005:4
‑
8.
技术实现要素:
[0012]
针对目前高速列车运行及进出隧道时,因受电弓所受空气阻力及隧道空气附加阻力突然变化,造成的弓网接触压力波动较大的问题,本发明提出一种气囊型受电弓弓网接触力补偿控制方法及装置,根据列车实际行驶情况实时调节受电弓弓网接触力,实现弓网接触作用离差小使高速铁路受电弓保持稳定的动态受流状态,并大幅降低了维护成本。
[0013]
本发明提供的一种气囊型受电弓弓网接触力补偿控制装置,包括微控制单元mcu,所述微控制单元包括stm32系列的单片机和阀板控制器。所述单片机包括主程序模块、串口通讯程序模块、预瞄程序模块和控制压力处理程序模块。
[0014]
主程序模块用于协调各模块的运行,从外界获取当前列车速度和隧道阻塞比,并输出给预瞄程序模块;预瞄程序模块根据当前列车速度和隧道阻塞比计算弓网接触补偿力,并将计算出的弓网接触补偿力反馈给主程序模块;主程序模块将从预瞄程序模块获取的弓网接触补偿力发送给控制压力处理程序模块;控制压力处理程序模块根据获取的弓网接触补偿力,计算所需的气囊补偿压力,将计算的气囊补偿压力与弓网目标压力相加获得当前气囊压力,将当前气囊压力返回给主程序模块;主程序模块将从控制压力处理程序模块获取的当前气囊压力转换为比例阀开度的控制信号,并输出给比例阀,进而控制气囊气压,实现对受电弓弓网接触力的自动补偿控制;串口通讯程序模块用于实现单片机与上位机之间的通信。
[0015]
预瞄程序模块计算弓网接触补偿力f的方式如下:
[0016]
f=
‑
513.7
‑
6.724v 9804zs 0.01986v2 51.01v
·
zs
‑
44630zs2[0017]
其中,v代表当前列车速度,zs代表隧道阻塞比。
[0018]
阀板控制器根据主程序模块发出的控制信号,控制比例阀的开度,以及控制开关阀的开关;所述开关阀用于控制受电弓气路的通断。
[0019]
本发明的气囊型受电弓弓网接触力补偿控制装置,还包括列车信息综合检测模块,远程控制信息模块,上位机监控调试模块,压差传感器,压力传感器,比例阀和开关阀。列车信息综合检测模块将实时检测的列车速度通过远程控制信息模块传输给mcu;上位机监控调试模块通过mcu获取开关阀的压力值,当检测到开关阀的压力值超过设定阈值时,代表对弓网接触力自动补偿控制出现较大误差,下发重新计算气囊补偿压力的控制命令给mcu,并根据前后两次计算的气囊补偿压力的误差判断是否是气囊补偿压力计算错误,若是,mcu根据新计算的气囊补偿压力下发控制信号给比例阀;若不是,调整当前需要的气囊压力为气囊能承受的阈值,mcu根据该值下发控制信号给比例阀;压差传感器用于检测列车
车体表面的风压,并将风压进行模数a/d转换后传输到mcu;压力传感器用于检测气囊气压,并将气囊气压通过a/d转换后传输给mcu;mcu所获取的比例阀开度的控制信号通过数模d/a转换后传输给比例阀。
[0020]
相应地,本发明提供的一种气囊型受电弓弓网接触力补偿控制方法,包括如下步骤:
[0021]
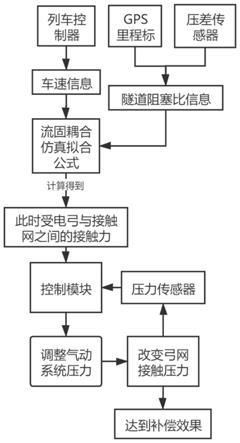
步骤一:通过计算流体动力学仿真(cfd),确定列车顶受电弓在不同运行车速、不同隧道阻塞比下,与接触网之间接触力的变化,通过多项式拟合构建受电弓弓网接触补偿力f与列车速度v、隧道阻塞比zs的函数关系;
[0022]
f=
‑
513.7
‑
6.724v 9804zs 0.01986v2 51.01v
·
zs
‑
44630zs2[0023]
其中,v代表列车速度,zs代表隧道阻塞比;
[0024]
步骤二:实时获取当前列车速度,并根据gps里程标获取列车即将进入的隧道的阻塞比;
[0025]
步骤三:在列车进入隧道前,执行预定的控制策略;
[0026]
所述预定的控制策略,具体是:根据当前列车速度和隧道阻塞比计算受电弓弓网接触补偿力,将弓网接触补偿力转换为气囊气压补偿控制量,并发送相应的控制信号给受电弓的气动系统,调整气动系统出口压力,进而调整弓网接触力;
[0027]
步骤四:实时监测开关阀上的压力传感器的测量值,当检测到该压力传感器的测量值超过设置的阈值时,代表此时对弓网接触力自动补偿控制出现较大误差,此时重新获取当前列车速度和隧道阻塞比计算弓网接触补偿力,重新获取气囊补偿压力及比例阀开度的控制信号;判断是否是由于获取数据错误导致对弓网接触力自动补偿控制出现较大误差,若是,则利用重新计算的气囊补偿压力调整气囊的比例阀开度;否则,调整当前需要的气囊压力为气囊能承受的阈值,根据该值调节比例阀开度。
[0028]
通过实时监测开关阀上的压力传感器的测量值,当出现需要关闭开关阀情况时,控制开关阀关闭,使受电弓降下。
[0029]
本发明与现有技术相比,具有以下优势和积极效果:
[0030]
(1)本发明装置及方法使用主动控制策略解决了高速列车运行及进出隧道时,因受电弓所受空气阻力及隧道空气附加阻力突然变化,造成的弓网接触压力波动较大的问题,实现弓网接触作用离差小使高速铁路受电弓保持稳定的动态受流状态,使得受电弓、接触网磨耗低,从而大幅降低维护成本。
[0031]
(2)本发明装置及方法采用gps里程标和风压变送器在列车进出隧道前判断隧道到来和隧道类型,并根据计算结果针对相应的隧道类型进行预瞄控制受电弓气囊压力,在进入或离开隧道之前就达到补偿弓网接触力的效果。由于无需加装伺服电机,不会产生高昂的成本,也不会产生由于电磁干扰引起的电机失灵;由于无需通过已经进入或离开隧道后产生的传感器信号进行对气囊的实时控制,避免了时滞对补偿过程产生的不利影响。
[0032]
(3)本发明方法采用计算流体动力学(cfd)仿真对不同车速、不同隧道阻塞比的工况进行仿真计算,进行函数拟合后可以形成任意车速以及隧道阻塞比下的弓网接触补偿力大小,通过试验验证由受电弓结构分析出的弓网接触力大小及气囊气压大小变化量之间的实际关系,从而能够将所需的弓网接触补偿力转化为底部的气囊内气压的需求大小,可以在进入隧道前得出结果,减少了实时算力要求,能够降低工程应用的成本。
[0033]
(4)本发明装置安装控制简便,具有能够及时补偿的优点。
附图说明
[0034]
图1是本发明实施例实现的气囊型受电弓弓网接触力补偿控制装置的示意图;
[0035]
图2是本发明的mcu的示意图;
[0036]
图3是本发明的弓网接触力补偿控制方法的流程示意图。
具体实施方式
[0037]
为了便于本领域普通技术人员理解和实施本发明,下面结合附图对本发明作进一步的详细和深入描述。
[0038]
本发明提供了一种气囊型受电弓弓网接触力补偿控制方法及装置,基于计算流体动力学(cfd)仿真来实现高速列车受电弓隧道内弓网接触力的补偿控制。本发明对受电弓弓网接触力的补偿控制通过控制气囊气压的补偿控制量来实现,主要用于在列车进出隧道的特殊工况。现有技术中采用控制气囊气压进行弓网接触力补偿控制时,是在列车开阔地带行驶时进行控制,存在响应时间过长、频率过低的问题,并不适用于本发明所研究的工况。本发明创新地通过里程标和车速信号达成预瞄控制,实现对列车进出隧道这一特殊工况的受电弓弓网接触力快速补偿。
[0039]
如图1所示,本发明实施例实现的气囊型受电弓弓网接触力补偿控制装置,包括:列车信息综合检测模块,远程控制信息模块,上位机监控调试模块,微控制单元mcu、压差传感器、压力传感器、比例阀和开关阀。
[0040]
列车信息综合检测模块通过多功能车辆总线mvb将实时检测的列车速度、行进方向等数据传输给远程控制信息模块。远程控制信息模块通过rs485接口与mcu进行通信,mcu由远程控制信息模块获得当前列车速度、行进方向等。由于需要从列车主机获取列车运行信息、路况等信息,因此需要实现与列车的通信,列车采用mvb总线来实现列车上各节点的通信,在短距离的通信控制采用远程控制信息模块来实现信息的转换,通过rs485来实现总线信息与控制器的信息交互。
[0041]
上位机监控调试模块通过rs232接口与mcu进行通信,通过mcu获取开关阀的压力值,当检测到自动补偿控制有较大误差时进行及时调节。由于实验硬件需要实时的测试、调试,因此需要与上位机进行通信。本发明基于rs232协议来获取mcu的数据,例如进出口气压、弓上压差传感器的压力变化等,最终将这些数据传输出来,方便后续的处理与研究。本发明实施例中上位机监控调试模块也即上位机,其对自动补偿控制有较大误差时进行及时调节的实现在下面步骤四中说明,此处不在赘述。
[0042]
压差传感器检测列车车体表面的高速风压,并将风压通过模数a/d转换器后传输到mcu。压力传感器检测气囊气压,并将气囊气压通过a/d转换后传输给mcu。mcu是本发明主要创新模块,在列车进出隧道前计算气囊气压补偿控制量,将控制量经过数模d/a转换器后输入比例阀,由比例阀调整气源输入气囊的量,对气囊气压进行调整,进而调整列车顶受电弓弓网接触力。muc还实时监控气源的开关阀的气压,并发送给上位机监控调试模块。本发明实施例中,a/d转换和d/a转换均设置在mcu中,无需另外设置。
[0043]
如图2所示,本发明实施例实现的微控制单元mcu包括阀板控制器和单片机
stm32f407。stm32f407便于编程、可扩展接口多,比起其他单片机内存更高、处理速度快,适合进行数据存储或进行实时计算,因此本发明实施例选取该单片机,但是本发明还可以使用其他类型的单片机来实现,并不限定于stm32f407芯片,只要能实现如图2所示功能的单片机均可以。本发明优选采用的是型号为stm32系列的单片机。
[0044]
mcu的阀板控制器接收mcu发来的控制信号,控制开关阀的开关,以及控制比例阀的开度。开关阀是控制受电弓气路通断的阀,当在特殊情况下需要关闭时,mcu下发控制开关阀关闭的控制命令,实现“急停开关”的功能,在将开关阀关闭后,可使得受电弓降下。开关阀在打开的情况下,才能通过控制比例阀的开度对气囊气压进行调节,并将力作用在弓头。阀板控制器控制比例阀的开度,根据行车需求,实现受电弓的升降弓行为,由此改变弓网接触力的大小。
[0045]
如图2所示,本发明的单片机stm32f407包括:定时模块、数模d/a转换器、模数a/d转换器、主程序模块main.c、串口通讯程序模块usart.c、数模转换程序模块dac.c、模数转换程序模块adc.c、预瞄程序模块premdl.c以及控制压力处理程序模块mfac.c等等。
[0046]
主程序模块main.c中存储主调函数,用于协调各模块的运行,通过调用各子模块功能函数来实现弓网接触力补偿控制。定时模块用于发送定时信号。串口通讯程序模块usart.c用于实现单片机与上位机之间的通信。数模转换程序模块dac.c存储d/a转换器的驱动程序,发送控制命令给d/a转换器。模数转换程序模块adc.c存储a/d转换器的驱动程序,将转换后的数字信号传输给主程序模块。主程序模块将获取的当前列车速度和隧道阻塞比输出给预瞄程序模块。预瞄程序模块premdl.c从主程序模块中接收当前列车速度和隧道阻塞比,根据预先存储的通过计算流体动力学仿真得到的公式计算由于进入隧道后气体压力变化导致弓头变化的力,将计算的弓网接触补偿力通过主程序模块传递给mfac模块。预瞄程序模块中计算弓网接触补偿力的公式在下面步骤一说明。控制压力处理程序模块mfac.c从主程序模块获得所需的弓网接触补偿力,计算补偿弓头力所需的气囊补偿压力,该值加上弓网目标压力得到当前需要的气囊压力,返回给主程序模块。主程序模块将当前气囊压力转换为比例阀开度的控制信号,输出给比例阀,进而控制气囊气压,达到受电弓主动控制的目的。图2中,输出的控制信号经过d/a转换后经信号隔离器传输给比例阀。
[0047]
预瞄程序模块还存储有根据计算流体动力学仿真获得的在不同车速、不同隧道阻塞比下的车体表面的风压信息,当微控制单元在无法获取隧道阻塞比和/或列车速度时,通过压差传感器测量列车车体表面的风压,并与预瞄程序模块中存储的不同车速、不同隧道阻塞比下的车体表面的风压信息进行比对,找出最接近的工况作为当前工况,进而根据该工况获取弓网接触补偿力。
[0048]
主程序模块还向上位机发送实时监测的开关阀气压,在接收到上位机监控调试模块下发的开关阀的开关控制命令时,发送控制信号给阀板控制器。
[0049]
如图3所示,本发明实施例实现的气囊型受电弓弓网接触力补偿控制方法,在通过计算流体动力学(cfd)仿真获得不同运行车速、不同隧道阻塞比下,弓网接触力的变化量后通过以下方式补偿控制,具体步骤如下:
[0050]
步骤一、通过计算流体动力学(cfd)仿真,确定列车顶受电弓在不同运行车速、不同隧道阻塞比下,与接触网之间接触力的变化。
[0051]
本发明进行cfd仿真时,首先建立列车、受电弓以及不同阻塞比隧道的三维模型,
然后进行网格划分(类似于有限元仿真过程),将不同的车速等效转化为列车静止、隧道内空气流动,从而计算出多种典型阻塞比和运行车速下的弓网接触力,从而计算出所需弓网补偿力。利用多项式拟合构建弓网接触补偿力与列车车速、隧道阻塞比的函数关系。
[0052]
本发明实施例中,拟合构建的弓网接触补偿力与列车车速、隧道阻塞比的函数关系如下:
[0053]
f=f
tol
‑
f0=
‑
513.7
‑
6.724v 9804zs 0.01986v2 51.01v
·
zs
‑
44630zs2[0054]
其中,f代表弓网接触补偿力,f
tol
是补偿后的弓网接触力,即cfd计算得到的当前隧道工况最佳接触力;f0是列车进入隧道前在开阔地带行驶时基本保持不变的弓网接触力;f
tol
与f0的差即为所需的弓网接触补偿力f;v为当前列车车速,单位m/s;zs为隧道阻塞比,变化范围不超过0.10至0.15。
[0055]
在进行cfd仿真时,还将获取列车在不同车速、不同隧道阻塞比的情况下的车体表面的高速风压,以便提供对弓网接触力自动补偿的备选策略。
[0056]
步骤二、mcu与列车进行通信,在进入隧道前后,通过gps里程标以及气压变送器信号获得当前隧道的阻塞比信息,通过列车信息综合检测模块获得当前车速和运行方向等信息。当前隧道的阻塞比是根据列车上gps里程标,在地图上对应读取出当前隧道的阻塞比,隧道阻塞比已预先存储在地图中。
[0057]
步骤三、在列车进入隧道之前,mcu实行预定的控制策略,将当前获取的列车速度和隧道阻塞比带入步骤一所述函数,来计算获得弓网接触补偿力,进而转换为当前情况下所需气囊压力的控制量,然后发送控制信号给受电弓的气动系统,调整受电弓弓网接触力。
[0058]
本发明实施例中,根据获取的弓网接触补偿力,计算所需的气囊补偿压力,将计算的气囊补偿压力与弓网目标压力相加获得当前需要的气囊压力,根据当前需要的气囊压力,生成比例阀开度的控制信号。本发明实施例的受电弓的气动系统指比例阀。
[0059]
通过对受电弓结构进行分析和实验验证,可获得弓网接触力与气囊气压变化量之间的关系,因此在获得弓网接触补偿力后,可对应转换为气囊补偿压力。弓网接触力与气囊气压变化量之间的关系一般可用一个线性关系表示,根据受电弓型号不同,线性关系会不同。
[0060]
本发明所产生的控制信号直接作用于受电弓的气动系统,不需要对气动系统进行加装,相比现有技术,大大降低了成本。
[0061]
步骤四、实时通过阀板上的压力传感器获取压力信号,并在自动补偿控制有较大误差时由上位机进行及时调节。
[0062]
mcu实时监测开关阀上的压力传感器的测量值,并发送给上位机,当上位机检测到该压力传感器的测量值超过设置的阈值时,代表对弓网接触力自动补偿控制出现较大误差,此时将由上位机进行调节,首先下发重新计算气囊补偿压力的命令给mcu;mcu重新读取gps里程标获取隧道阻塞比,重新从列车信息综合检测模块获取当前列车速度,然后重新计算弓网接触补偿力,得到对应的气囊补偿压力及比例阀开度的控制信号。根据所计算的结果,上位机判断是否是获取数据(车速、隧道阻塞比)错误,如判断前后两次计算的气囊补偿压力是否相差较大,相差较大表示是获取数据错误,若是,mcu根据重新计算获得的气囊补偿压力及比例阀开度的控制信号发送控制信号给受电弓的气动系统;若否,表示是因为环境因素导致的自动补偿控制出现较大误差,此时,上位机直接将当前需要的气囊压力调整
为气囊能承受气压阈值,下发给mcu,mcu进一步下发对应的调节比例阀开度的控制命令。
[0063]
同时,上位机还根据测量的开关阀压力,控制开关阀的通断,实现“急停开关”的作用,当关闭开关阀后,将使得受电弓降下,以适用特殊情况。
[0064]
当mcu无法获取隧道阻塞比和/或列车速度时,本发明的mcu还通过压差传感器测量列车车体表面的高速风压,将所测量的风压,在cfd仿真时存储的在不同车速、不同隧道阻塞比下的车体表面的高速风压信息进行比对,找出条件最接近的工况作为当前工况,进而根据该工况获取弓网接触补偿力,进行自动补偿控制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。