1.本发明涉及一种火箭发动机结构位姿测量系统,具体涉及一种大推力火箭发动机结构位姿测量系统及补偿方法。
背景技术:
2.火箭发动机热试状态下结构位移及姿态变化信息的获取,目前主要依赖于振动传感器及应变片测量获取,由于测点数量有限,获得的局部数据不能反映宏观的结构响应以及实际的危险部位。通过图像测量技术,测量火箭发动机关键部位的结构应变及位移,在部分火箭发动机热试中已有应用。但是,在火箭发动机热试中,直接使用数字图像技术存在的问题是:未对所用相机自身在冲击、振动条件下的附加位移进行剥离,又由于大推力火箭发动机试车所产生的环境振动非常强烈,导致识别的关键结构位姿变化偏差较大。
技术实现要素:
3.本发明的目的是解决现有火箭发动机结构位姿测量系统及补偿方法存在未对所用相机自身在冲击、振动条件下的附加位移进行剥离,而大推力火箭发动机试车所产生的环境振动非常强烈,导致识别的关键结构位姿变化偏差较大的技术问题,提供一种大推力火箭发动机结构位姿测量系统及补偿方法。
4.为解决上述技术问题,本发明提供的技术解决方案如下:
5.一种大推力火箭发动机结构位姿测量系统,其特殊之处在于:
6.包括参考标志点、反光标志点、控制采集器和至少两个高速摄影机;
7.所述至少两个高速摄影机均设置于被测发动机的周围,用于形成被测发动机的三维空间视觉测量域;
8.所述参考标志点设置于试车台的对接架对接被测发动机的对接端,用于获取高速摄影机相对于试车台的移动速度及位移信息;
9.所述反光标志点设置于被测发动机的待测部位,用于位置辨识;
10.所述控制采集器的输入端同时连接所有高速摄影机的输出端。
11.进一步地,所述待测部位为被测发动机的涡轮泵和两个喷管。
12.进一步地,所述高速摄影机有两台,帧率均为1000帧/s。
13.同时,本发明还提供了一种大推力火箭发动机结构位姿补偿方法,基于上述的大推力火箭发动机结构位姿测量系统,其特殊之处在于,包括以下步骤:
14.1)将被测发动机使用对接架对接至试车台,通过试车控制测量系统的试车时统同时触发所有高速摄影机,通过控制采集器按照相同的频率采集试车全程的图像数据,并将该图像数据确定为位姿分析的原始图像数据;
15.2)对步骤1)所得图像数据逐帧进行反光标志点检测,并根据时间排序,形成包含高速摄影机自身附加位移及试车台位移的发动机位姿信息;
16.3)对步骤1)所得图像数据逐帧进行参考标志点检测,以获取高速摄影机相对于试
车台的移动速度及位移信息;
17.4)利用步骤3)所得移动速度及位移信息,对步骤2)所得发动机位姿信息进行补偿,以获取被测发动机相对于试车台的位姿变化数据,用于发动机冲击载荷结构响应评估。
18.进一步地,步骤4)中,所述位姿变化数据为位移随时间变化的曲线,该曲线包含轴向x、径向y和切向z三个方向的数据。
19.进一步地,还包括在步骤1)之前,对高速摄影机进行标定的步骤。
20.本发明相比现有技术具有的有益效果如下:
21.本发明提供的大推力火箭发动机结构位姿测量系统,包括参考标志点、反光标志点、控制采集器和至少两个高速摄影机,该补偿方法通过两台以上高速摄影机,对大推力火箭发动机结构上的测量用反光标志点进行位移解算,获得发动机结构位姿数据,在试车台与发动机对接的对接端设置参考标志点,通过对参考标志点的解算,获取高速摄影机相对于试车台的振动数据,并利用其对发动机位姿信息进行补偿,以获取被测发动机相对于试车台的位姿变化数据,解决了高速摄影机附加振动及试车台附加位移难以精确获取的难题,所得的位姿变化数据可作为以发动机上端固定支撑状态为计算模型的结构冲击响应的载荷输入,以便进行发动机主体结构全程冲击载荷结构响应评估,该补偿方法简化了高速摄影机在大推力发动机热试环境中强振动补偿的复杂问题,实现了大推力火箭发动机在热试强振动环境下的精确结构位姿测量,可直接用于火箭发动机处于平稳过程的结构仿真,为大推力火箭发动机的研制、考核及结构仿真、评估提供可靠数据。
附图说明
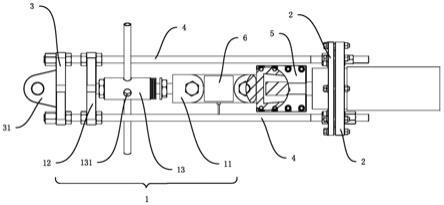
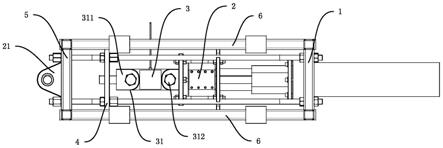
22.图1为本发明大推力火箭发动机结构位姿测量系统实施例的结构示意图,图中还示出了被测发动机;
23.图2为本发明实施例中利用两个高速摄影机对同一反光标志点进行成像并处理后所得位姿数据图片,两个高速摄影机一个位于近点,一个位于远点,图中,a代表近点的高速摄影机所得位姿数据,b代表远点的高速摄影机所得位姿数据;
24.图3为本发明实施例中利用两个高速摄影机对同一反光标志点进行成像并处理和补偿后所得位姿数据图片,图中,a代表近点的高速摄影机所得位姿数据,b代表远点的高速摄影机所得位姿数据;
25.附图标记说明:
[0026]1‑
参考标志点、2
‑
高速摄影机、3
‑
反光标志点、4
‑
控制采集器、5
‑
被测发动机、6
‑
对接架。
具体实施方式
[0027]
下面结合附图和实施例对本发明作进一步地说明。
[0028]
本发明提供一种大推力火箭发动机结构位姿测量系统,这是一种图像式测量系统,具体包括参考标志点1、反光标志点3、控制采集器4和两个高速摄影机2(也可以采用多个高速摄影机2);所述两个高速摄影机2的帧率均为1000帧/s,均设置于被测发动机5的周围,用于形成被测发动机5的三维空间视觉测量域;所述参考标志点1设置于试车台的对接架6对接被测发动机5的对接端,用于获取高速摄影机2相对于试车台的移动速度及位移信
息,参考标志点1的设置应保证所有高速摄影机2均能识别到;所述反光标志点3设置于被测发动机5的待测部位,待测部位具体为主体结构部位(也即关键部位,可以为被测发动机5的涡轮泵和两个喷管),用于位置辨识(表征结构位置);所述控制采集器4的输入端同时连接所有高速摄影机2的输出端。
[0029]
基于上述大推力火箭发动机结构位姿测量系统的大推力火箭发动机结构位姿补偿方法,包括以下步骤:
[0030]
1)将被测发动机5使用对接架6对接至试车台,通过试车控制测量系统的试车时统同时触发所有高速摄影机2(试车前需对高速摄影机2进行标定,以保证可以建立被测发动机5的三维空间视觉测量域),通过控制采集器4按照相同的频率采集试车全程的图像数据,该图像数据为位姿分析的原始图像数据;
[0031]
2)对步骤1)所得图像数据逐帧进行反光标志点3检测(即对步骤1)所得原始图像数据逐帧进行反光标志点3的位移解算),并根据时间排序,形成包含高速摄影机2自身附加位移及试车台位移的发动机位姿信息(即获得以高速摄影机2为零点坐标的发动机各点位姿信息);
[0032]
3)对步骤1)所得图像数据逐帧进行参考标志点1检测(即对步骤1)所得原始图像数据逐帧进行参考标志点1的位移解算),以获取高速摄影机2相对于试车台的移动速度及位移信息(即获得以参考标志点1为零点坐标的高速摄影机2位姿信息);
[0033]
4)利用步骤3)所得移动速度及位移信息,对步骤2)所得发动机位姿信息进行补偿修正,以获取被测发动机5主体结构位姿信息相对于试车台(等同于被测发动机5主体结构位姿信息相对于参考标志点1,也即剔除了高速摄影机2自身附加位移及试车台位移)的位姿变化数据(为位移随时间变化的曲线,该曲线包含轴向x、径向y和切向z三个方向的数据),用于发动机冲击载荷结构响应评估。
[0034]
如图2和图3所示,通过利用两个高速摄影机2对同一反光标志点3进行成像并补偿,得到补偿前后的数据对比图,补偿前两个高速摄影机2对同一反光标志点3获得的发动机结构在全程的位姿数据存在较大偏差,补偿后两个高速摄影机2测得同一反光标志点3的数据较为温和(偏差较小),补偿后数据剥离了高速摄影机2的附加振动,所得的位姿变化数据可作为以发动机上端固定支撑状态为计算模型的结构冲击响应的载荷输入,进行发动机主体结构全程冲击载荷结构响应评估。
[0035]
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制,对于本领域的普通专业技术人员来说,可以对前述实施例所记载的具体技术方案进行修改,或者对其中部分技术特征进行等同替换,而这些修改或者替换,并不使相应技术方案的本质脱离本发明所保护技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。