自适应桥墩截面直径的桥墩检测设备
1.技术领域:
2.本发明涉及一种自适应桥墩截面直径的桥墩检测设备。
3.
背景技术:
4.目前现有的水下桥墩检测设备多数是在水面构建适合待检测桥墩形状、尺寸的固定桁架,然后利用卷扬或滑轮机构向水下传送视频检测设备达到检测水下桥墩检测的目的。
5.在水面建立桥墩检测桁架,工程量巨大,而且必须在水面进行,给施工带来不便的同时且需要多条排水量较大的船只进行结构件等物料的运输,耗费人力物力财力较为严重。
6.目前构建的桥墩检测桁架为刚性固连结构,组装完毕后,其尺寸一定不可调节,只能检测单一形状、单一尺寸的桥墩,遇到锥形、异形变截面多曲面的桥墩结构则无法完成检测任务,只能浮出水面,重新构建对应的桁架。
7.
技术实现要素:
8.本发明的目的是提供一种自适应桥墩截面直径的桥墩检测设备,采用环抱式柔性紧固系统,可以自适应桥墩形状及不同界面直径,解决了传统桁架检测对象单一性的不足,大大提高了水下桥墩的检测效率。
9.上述的目的通过以下的技术方案实现:
10.一种自适应桥墩截面直径的桥墩检测设备,包括:
11.一组链板单元,所述链板单元包括链板,所述链板两侧安装有链接耳板;
12.柔性连接段,所述柔性连接段安装在2个所述链板单元的链接耳板之间;
13.全向轮,所述全向轮安装在所述链板底部;
14.水下机器人本体,所述水下机器人本体与所述链板单元连接;
15.水下成像系统,所述水下成像系统安装在所述水下机器人本体上。
16.所述自适应桥墩截面直径的桥墩检测设备,所述柔性连接段内置复位弹簧。
17.所述自适应桥墩截面直径的桥墩检测设备,所述柔性连接段采用具有良好张力的橡胶材质。
18.所述自适应桥墩截面直径的桥墩检测设备,所述链板与链接耳板之间通过销钉连接。
19.本发明的有益效果:
20.本发明装置应用在特制的水下机器人上,搭载本机构,将环保式链板系统提前在陆地上装配完成后,依靠小型水面船只运送至待检测桥墩处,后将其围绕并桥墩并固连在水下机器人上,然后从地面控制终端进行操作。
21.本发明装置抛弃传统的卷扬机构带动水下成像系统动作、成像,而转换为水下机器人直接在水下作业,也陆地关联的只有两根通讯电缆,操作方便,整体系统运动简单,施工简单。
22.本发明装置整个系统构建简单,不需要太多水面辅助船只协助工作,也不需要太
多水面人员参与系统的装配与构建,省事省力。
23.本发明装置采用环抱式柔性紧固系统,可以自适应桥墩形状及不同界面直径,解决了传统桁架检测对象单一性的不足,大大提高了水下桥墩的检测效率。
24.本发明装置特制链板背部装有全向辅助运动轮,可以随水下机器人本体运动而围绕桥墩表面做横向竖向的运动,减小与桥墩表面接触摩擦力,同时方便运动与控制。
25.本发明装置柔性连接段采用特殊橡胶材质,具有很好的张力,在内置的复位弹簧作用下,可以紧密贴合适应桥墩表面,依靠弹簧力快速的拉伸或弯曲或收缩,达到自适应桥墩表面的目的。
26.结构简单,通过简单的机械结构实现水下桥墩检测的目的,而不需要太多人力物力的辅助配合。
27.水下机器人带动整个系统在水下作业,地面操作人员能够更简便的操作控制。
28.整个环抱式柔性紧固系统可以在不更改任何结构前提下,一次下水自适应桥墩形状及截面尺寸而完成既定作业计划。
29.整个系统与地面仅仅通过两根水下机器人线缆控制,不需要额外配备其他水面辅助作业装置。
30.附图说明:
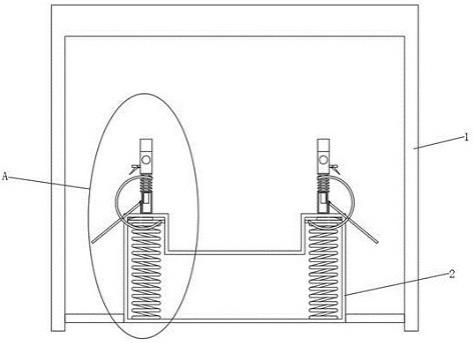
31.附图1是本实用新型的结构示意图。
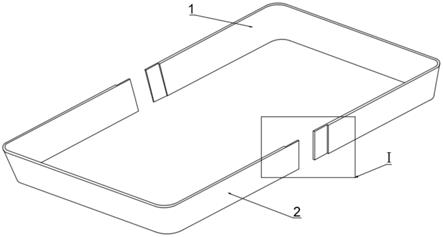
32.附图2是附图1的仰视图。
33.附图3是附图1中a的局部放大图。
34.附图4是本实用新型的立体图。
35.具体实施方式:
36.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
37.本发明提供了一种自适应桥墩截面直径的桥墩检测设备,包括:水下成像系统1、水下机器人本体2、特制链板3、链接耳板4、柔性连接段5、复位弹簧、销钉6,全向轮7,水下机器人本体1搭载水下成像系统,可对桥墩水下浸没部位进行抵近观察。
38.由特制链板3、链接耳板4、柔性连接段5、复位弹簧、销钉6,组合为环抱式柔性紧固系统,通过增减链板节数可以自适应各种桥墩形状及截面尺寸。
39.安装在特制链板3底部的全向轮7,在柔性环抱固定系统紧固后,可以紧密接触在桥墩外表面,随着水下机器人本体1系统本体动作,减小整个柔性环保系统的摩擦力,更好的适应桥墩形状及截面尺寸。
40.安装在特制链板3、柔性连接段5中的复位弹簧,依靠自然弹簧力可以自适应桥墩截面形状和尺寸,达到始终与桥墩表面贴合匹配的目的。
41.水下机器人本体1的数量可以根据实际需要确定,数量为1个或2个或一组。
42.工作原理:
43.当需要进行水下桥墩检测时,首先将特制链板3与链接耳板4用销钉6固定成为一个链板单元,然后在每两个链板单元之间固定内置复位弹簧的柔性连接段5,这样组合而成
一个柔性单元,根据待检测桥墩最大截面直接,将每两个柔性单元串联在一起,最后,一端分别固定安装在水下机器人本体1上。然后,将整个装置环绕包覆在待检测桥墩表面,此时将柔性链板系统另一端与水下机器人本体1安装固定好即可。此时由技术人员在地面站,通过操控控制终端,对水下机器人本体1进行运动控制,通过水下成像系统1对桥墩表面进行检测。
44.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
技术特征:
1.一种自适应桥墩截面直径的桥墩检测设备,其特征在于,包括:一组链板单元,所述链板单元包括链板(3),所述链板(3)两侧安装有链接耳板(4);柔性连接段(5),所述柔性连接段(5)安装在2个所述链板单元的链接耳板(4)之间;全向轮(7),所述全向轮(7)安装在所述链板(3)底部;水下机器人本体(2),所述水下机器人本体(2)与所述链板单元连接;水下成像系统(1),所述水下成像系统(1)安装在所述水下机器人本体(2)上。2.根据权利要求1所述自适应桥墩截面直径的桥墩检测设备,其特征在于,所述柔性连接段(5)内置复位弹簧。3.根据权利要求2所述自适应桥墩截面直径的桥墩检测设备,其特征在于,所述柔性连接段(5)采用具有良好张力的橡胶材质。4.根据权利要求3所述自适应桥墩截面直径的桥墩检测设备,其特征在于,所述链板(3)与链接耳板(4)之间通过销钉(6)连接。
技术总结
自适应桥墩截面直径的桥墩检测设备。本实用新型组成包括:一组链板单元,所述链板单元包括链板(3),所述链板(3)两侧安装有链接耳板(4);柔性连接段(5),所述柔性连接段(5)安装在2个所述链板单元的链接耳板(4)之间;全向轮(7),所述全向轮(7)安装在所述链板(3)底部;水下机器人本体(2),所述水下机器人本体(8)与所述链板单元连接;水下成像系统(1),所述水下成像系统(1)安装在所述水下机器人(2)本体上。本实用新型采用环抱式柔性紧固系统,可以自适应桥墩形状及不同界面直径,解决了传统桁架检测对象单一性的不足,大大提高了水下桥墩的检测效率。效率。效率。
技术研发人员:张川 王猛 杨志琨
受保护的技术使用者:湖南哈工楚帆智能科技有限公司
技术研发日:2020.11.25
技术公布日:2021/9/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。