1.本技术涉及道路防护工程的领域,尤其是涉及一种智能化护栏及自动定位系统。
背景技术:
2.交通护栏是设置在路肩外侧、交通分隔带以及人行道路牙等位置的一种交通安全设施。通过自体变形或车辆爬高来吸收碰撞能量,从而改变车辆行驶方向、阻止车辆越出路外或进入对向车道、最大程度地减少对乘员的伤害。
3.目前,由于道路情况非常复杂,出现车辆撞击护栏的情况后,经常会出现护栏受损的情况,而完成交通事故的处理后,往往需要工程工程队对护栏进行维修。
4.但是工程施工对前往现场维修时,已经是车祸处理完毕以后,道路路面已经恢复秩序,需要工程队沿道路对护栏进行排查,非常影响护栏的维修效率。
技术实现要素:
5.为了解决破损护栏难以快速定位的问题,本技术提供一种智能化护栏及自动定位系统。
6.一方面,本技术提供的一种智能化护栏,采用如下的技术方案:一种智能化护栏,包括多根支撑柱和多根设置在相邻支撑柱之间的挡杆,所述支撑柱内设有安装腔,所述安装腔内设有定位组件,所述安装腔内设有情况调查组件。
7.通过采用上述技术方案,定位组件对被破坏的支撑柱进行定位,并发送位置信号,工程队接收到位置信号后,能够根据位置信号快速定位护栏破损的位置,方便在事故完成后及时对护栏进行修缮。情况调查组件对现场的情况进行调查,方便根据现场实际的破损情况对进行针对性修缮,进一步提升护栏的修缮效率。
8.可选的,所述定位组件包括多个力敏传感器和gps定位器,多个所述力敏传感器间隔设置在安装腔的内壁上,所述gps定位器设置在支撑柱的底端。
9.通过采用上述技术方案,力敏传感器检测支撑柱受到的冲击力,当冲击力到达一定的阈值,力敏传感器驱动gps定位器对当前的支撑柱进行gps定位,并将位置坐标信息向外发送。工程队根据gps定位器发送的位置信息,快速定位至事故地点,还可以根据力敏传感器发送的数据对护栏的受损情况进行预估,方便应对支撑柱不同程度的损伤。
10.可选的,所述支撑柱的底端设有与安装腔连通的置物盒,所述gps定位器设置在置物盒内。
11.通过采用上述技术方案,设置置物盒使gps定位器设置在地下,当出现严重车祸致使支撑柱断裂后,gps定位器在地下保持完好,能够继续发送定位信号,保持定位信号的畅通。
12.可选的,每根所述挡杆上均开设有与安装腔连通的容纳腔,所述定位组件包括多个拉力传感器、多根触发绳和gps定位器,每根所述触发绳的两端各连接一个拉力传感器,多个所述拉力传感器间隔设置在安装腔的内壁上,所述触发绳从一根支撑柱的安装腔通过
容纳腔进入另一根支撑柱的安装腔。
13.通过采用上述技术方案,车祸致使挡杆变形但不影响支撑柱时,触发绳在挡杆和冲击力的带动下,拉扯拉力传感器,拉力传感器受到的拉力到达阈值后,拉力传感器触发gps定位器运转,进行事故地点的定位。
14.可选的,所述触发绳包括多个连接部和断裂部,所述断裂部设置在相邻连接部之间,所述断裂部比连接部细。
15.通过采用上述技术方案,断裂部相较于连接部更细,促使触发绳能够快速断裂,触发绳触发拉力传感器运转后,快速断裂,减少触发绳对拉力传感器的持续拉扯,减少出现拉力传感器被拉扯坏的情况。
16.可选的,所述安装腔内设有安装板,所述情况调查组件包括摄像头和第一电机,所述第一电机竖直设置在安装板上,所述摄像头与第一电机的输出轴连接。
17.通过采用上述技术方案,设置安装板方便第一电机在安装腔内固定,第一电机运转带动摄像头转动,方便摄像头对现场进行图像拍摄,方便工程队及时了解现场情况。
18.可选的,所述安装腔内设有升降板,所述升降板的底面上设有多根齿条,所述安装腔内设有与齿条啮合的齿轮,所述安装板与第一电机之间设有用于驱动齿轮转动的第二电机,所述摄像头外壳的底面上设有连接套,所述连接套与第一电机的输出轴同轴连接。
19.通过采用上述技术方案,第二电机运转带动升降板在安装腔内升降,升降板带动摄像头在安装腔内升降,摄像头上升使摄像头能够对现场即兴图像拍摄,摄像头下降方便摄像头保存在安装腔内,延长摄像头的使用寿命。
20.可选的,所述安装板底面的中心设有光电传感器。
21.通过采用上述技术方案,当定位组件没能触发但接到报修信息时,启用光电传感器,对支撑柱是否偏斜进行排查。若检测不到光信号,则需要进行修缮,若检测到光信号,则为护栏能够正常使用。
22.可选的,所述安装腔的内壁上设有多个温度传感器,多个所述温度传感器间隔设置。
23.通过采用上述技术方案,根据温度传感器的发送的温度数据,进行车辆起火的查探,方便工程队对不同的损坏原因进行认定,并根据损坏原因进行全面的修缮。
24.另一方面,本技术还提供的一种自动定位系统,采用如下的技术方案:一种自动定位系统,包括上述的一种智能化护栏,还包括终端机,用于接收和处理智能化护栏发送的数据信息,将接收到的定位信息向外发送;控制机,接收终端机发送的定位信息,并接收工程队的操作信息,并将操作信息发送给终端机,再由终端机对操作信息进行分析,并发送至智能化护栏内的定位组件和情况调查组件通过采用上述技术方案,信息获取模块获取到护栏的损坏信息后,触发定位模块对施工地点进行gps定位,并将定位数据发送至总端,由总端将位置信息向工程队展示。转向调节模块和图像获取模块对事故地点的图像进行获取,方便提前制定处理方案。当信息获取模块无法获取护栏损坏信息,但有护栏需要修缮的通知时,启用老化检测模块,对护栏进行排查,并对老化的护栏进行定位,方便进行针修缮。
25.综上所述,本技术包括以下至少一种有益技术效果:1.设置定位组件对被破坏的支撑柱进行定位,并发送位置信号,工程队能够根据位置信号快速定位护栏破损的位置,方便在事故完成后及时对护栏进行修缮,情况调查组件对现场的情况进行调查,方便根据现场实际的破损情况对进行针对性修缮;2.设置摄像头并能够调节摄像头的朝向,对护栏的破损情况进行预先了解,方便制定修缮方案。
附图说明
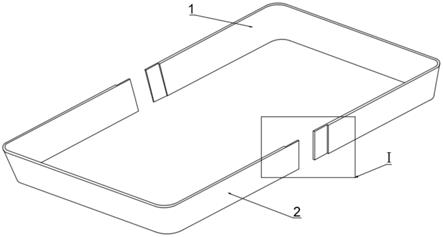
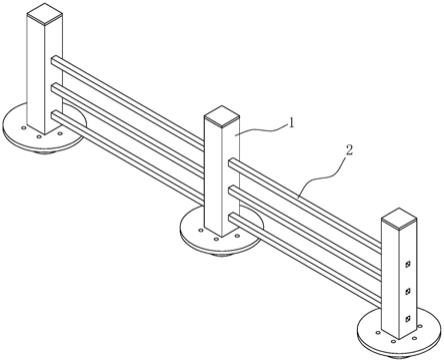
26.图1是本技术实施例的整体结构示意图。
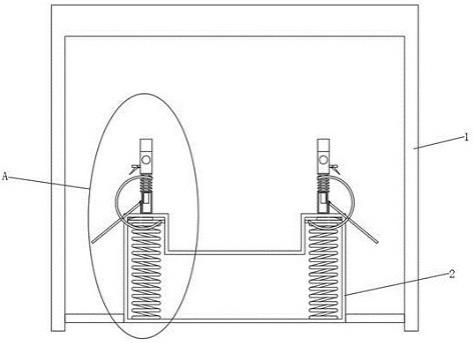
27.图2是体现支撑柱内部结构的示意图。
28.图3是体现升降板结构的示意图。
29.图4是体现摄像头结构的示意图。
30.图5是体现自动定位系统的框图。
31.附图标记说明:1、支撑柱;2、挡杆;3、安装腔;4、容纳腔;5、定位组件;51、力敏传感器;52、gps定位器;53、拉力传感器;54、触发绳;541、连接部;542、断裂部;6、情况调查组件;61、第一电机;62、摄像头;7、安装板;8、升降板;9、齿条;10、齿轮;11、第二电机;12、置物盒;13、导向套;14、导向杆;15、连接套;16、光电传感器;17、温度传感器;101、信息获取模块;102、定位模块;103、总端;104、图像获取模块;105、转向调节模块;106、事故检测模块。
具体实施方式
32.以下结合附图1
‑
5对本技术作进一步详细说明。
33.本技术实施例公开一种智能化护栏。参照图1和图2,一种智能化护栏包括多根支撑柱1和多根设置在相邻支撑柱1之间的挡杆2,多根挡杆2沿竖直方向间隔排布,每根挡杆2长度方向两端均固定在支撑柱1的侧壁上。
34.参照图2和图3,支撑柱1内开设有安装腔3,容纳腔4内设有定位组件5,定位组件5包括多个力敏传感器51和gps定位器52,多个力敏传感器51均与预设的终端机101电连接,gps定位器52与终端机101电连接,多个力敏传感器51沿支撑柱1的圆周方向均匀间隔排布。当车辆撞击护栏时,支撑柱1受到的冲击力通过力敏传感器51进行检测,并将检测结果向终端机101发送,当冲击力超过终端机101内预设的阈值后,终端机101向gps定位器52发送触发信号,gps定位器52接收到触发信号后,接收卫星的定位信号,并将位置信息向终端机101发送。工程队通过预设的控制机102,从终端机101调取位置信息,对事故地进行快速定位,方便定位事故地点并进行前往进行护栏的修缮。
35.参照图2和图3,支撑柱1的底端设有置物盒12,置物盒12与支撑柱1法兰连接,gps定位器52固定在置物盒12内。当支撑柱1设置完成后,置物盒12设置在地下,当出现车祸情况时,即使支撑柱1受到严重损坏,也能够确保gps定位器52完好。保持车祸后gps定位器52的持续运转,保持信息传输的通畅。
36.参照图2和图3,挡杆2内开设有与安装腔3连通的容纳腔4,定位组件5还包括触发绳54和多个拉力传感器53,拉力传感器53固定在挡杆2与支撑柱1的接口处,多个拉力传感器53均与终端机101电连接,触发绳54穿设在容纳腔4内,触发绳54一端与拉力传感器53连
接,另一端与另一根支撑柱1内的拉力传感器53连接。当挡杆2在车辆的撞击作用下变形时,挡杆2内的触发绳54随挡杆2发生形变,触发绳54产生对拉力传感器53的拉力,拉力传感器53将拉力数据发送至终端机101内。当拉力超过终端机101内预设的阈值后,终端机101向gps定位器52发送触发信号,gps定位器52接收到触发信号后,接收卫星的定位信号,并将位置信息向终端机101发送。工程队通过控制机102,从终端机101调取位置信息,对事故地进行快速定位,方便定位事故地点并进行前往进行护栏的修缮。
37.参照图2和图3,每根触发绳54均包括多段连接部541和多段断裂部542,连接部541和断裂部542一体成型,连接部541的直径大于断裂部542的直径。当触发绳54受到较大的冲击时,断裂部542受力断裂,降低触发绳54对拉力传感器53的拉扯作用,避免拉力传感器53由于触发绳54拉扯而受损的情况。
38.参照图2和图3,支撑柱1的内壁上固定有安装板7,安装板7设置在支撑柱1的顶端。安装板7上固定有第二电机11,第二电机11为双轴电机,第二电机11的两根输出轴上均同轴固定有齿轮10。安装腔3内设有升降板8,升降板8设置在安装板7的上方,升降板8的底面的对角上竖直固定有齿条9,齿条9与齿轮10啮合。升降板8底面上竖直固定有导向杆14,导向杆14对角设置有两根,升降板8的底面上固定有设有导向套13。第二电机11运转带动齿轮10转动,齿轮10和齿条9传动,带动升降板8在安装腔3内升降,导向杆14在导向套13内滑动,提升升降板8的升降精度和升降稳定性。
39.参照图2和图3,安装腔3内设有情况调查组件6,情况调查组件6包括摄像头62和第一电机61,摄像头62设置在升降板8上,第一电机61固定在第二电机11的外壳上,第一电机61的输出轴竖直向上设置。
40.参照图3和图4,摄像头62外壳的底面上固定有供第一电机61转轴插设的连接套15。第一电机61运转带动连接套15转动,能够改变摄像头62的朝向。在第二电机11运转后,升降板8升降过程中,连接套15在第一电机61的输出轴上滑动,但保持与第一电机61输出轴的连接。终端机101接收从控制机103发送的操作信息,并将操作信息向第一电机61和第二电机11发送,第二电机11运转将摄像头62从安装腔3内升起,同时第一电机61运转调整摄像头62的朝向,摄像头62对事故现场进行拍摄,并将拍摄结果上传,方便工程队根据拍摄结果对现场情况进行预估以及误报的排查。
41.参照图2和图3,安装腔3的内壁上设有多个温度传感器17,多个温度传感器17均与gps定位器52电连接。通过设置温度传感器17,对周围的环境温度进行检测,并将温度数据发送至终端机101内与预设的阈值进行比对。当出现车辆起火但未对护栏造成冲击时,支撑柱1局部温度快速升高,当温度传感器17检测到的温度超过终端机101内的阈值后,终端机101发送触发信号给gps定位器52,gps定位器52运转进行事故现场的定位。工程队通过控制机102,从终端机101调取位置信息,对事故地进行快速定位,方便定位事故地点并进行前往进行护栏的修缮。
42.参照图1和图2,安装板7底面的中心设有光电传感器16,具体为对射式光电传感器,光电传感器16呈竖直设置。支撑柱1长期暴露在室外,容易产生老化,老化后的支撑柱1由于其内部众多的电子器件,存在支撑柱1竖直段由于老化而倾斜的情况出现。常时状态,光电传感器16保持待机状态;当需要进行护栏的老化检测时,工程队向控制机102发送控制命令,控制机102将控制命令向终端机101发送,终端机101接收到控制命令后,启动光电传
感器16运转,光电传感器16向支撑柱1的底端发射光信号。
43.当光电传感器16接收到反射的光信号时,说明支撑柱1保持直立,支撑柱1能够继续正常使用。若无法接收到反射的光信号,说明支撑柱1由于老化导致倾斜,存在影响正常使用的情况,需要由施工队前往进行支撑柱的更换。光电传感器16将光信号的检测结果发送至终端机101,终端机101对光电传感器16发送的结果进行分析和筛选,保留未接收到光信号的光电传感器的检测结果,并将检测结果反馈至控制端102,再由控制端102将检测结果展示给工程队,工程队根据检测结果对老化的支撑柱1进行维护和更换。
44.本技术实施例一种智能化护栏的工作原理为:车辆撞击支撑柱1导致交通事故时,力敏传感器51将冲击力数值发送至预设的终端机101,冲击力超过预设的阈值的,终端机10向gps定位器52发送触发信号,驱动gps定位器52运转,进行事故地点的定位,并将位置信息传回终端机101。工程队通过预设的控制机102调取终端机101上的位置信息,方便工程队快速定位事故地点。
45.车辆撞击挡杆2导致交通事故时,拉力传感器53将冲击力转换的拉力向终端机101发送,拉力超过预设的阈值的,终端机101向gps定位器52发送触发信号,驱动gps定位器52运转,进行事故地点的定位,并将位置信息传回终端机101。工程队通过预设的控制机102调取终端机101上的位置信息,方便工程队快速定位事故地点。
46.出现车辆起火但未对护栏造成撞击时,支撑柱1周围温度快速升高,温度传感器17向终端机101发送温度数据,温度超过终端机101内预设的阈值的,终端机101向gps定位器52发送触发信号,驱动gps定位器52运转,进行事故地点的定位,并将位置信息传回终端机101。工程队通过预设的控制机102调取终端机101上的位置信息,方便工程队快速定位事故地点。
47.进行支撑柱1的老化检修时,工程队向控制机102发送控制命令,控制机102将控制命令发送至终端机101,终端机101根据控制命令向光电传感器16发送触发信号,光电传感器16运转,光电传感器16接收到光信号的结果反馈至终端机101,终端机101分析反馈结果并将分析结果发送至控制机102,工程对根据控制机102上反馈的结果,对光电传感器16没能接收到光信号的支撑柱1进行更换和维护。
48.参照图5,本技术实施例还公开一种自动定位系统,包括上述的智能化护栏,还包括终端机101和控制机102,工程队在终端机101内预设一定的阈值,智能化护栏内的力敏传感器51、拉力传感器53和温度传感器17将检测到的数据信息向终端机101发送,终端机101将接收到的信息与预设的阈值进行对比,根据比对结果对gps定位器52进行控制。
49.终端机101当驱动gps定位器52运转时,gps定位器52将接收到的位置信息向终端机101反馈,终端机101将反馈的信息向控制机102发送,工程队提取控制机102上的位置信息,快速定位事故地点。
50.工程队向控制机102发送控制命令,由控制机102将控制命令向终端机102发送,终端机101接收并读取控制命令,将控制命令向第一电机61、第二电机11和光电传感器16发送。
51.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。