1.本发明属于清洁机器人技术领域,更具体地说,是一种应用于垂直平面的可越障移动吸附装置。
背景技术:
2.在高层建筑中,巨大的玻璃幕墙和普通外墙的清洁通常采用传统的人工清洁方式,“蜘蛛人”在清洁工作中的危险性人所共知,且人工清洁擦窗,因客观条件制约,清洁范围及清洁程度有限,边角的地方有往往并不能充分清洁。另一方面,玻璃幕墙在使用过程中常会产生裂纹,主要原因为:1.由杂质硫化镍引起的玻璃炸裂,当含有硫化镍杂质的玻璃被安装在幕墙上时,由于外界温度升高,导致硫化镍体积发生微小变化,使玻璃内部产生微小裂缝;2.由热应力造成的玻璃幕墙破碎,当太阳光照射在玻璃幕墙表面时,玻璃受热膨胀,若玻璃受热均匀,则边角与中央同时均匀膨胀。若受热不均匀,在玻璃内部就会产生拉应力,玻璃边部瑕疵受力会逐步加大。由此带来的潜在的危险及伤害事故,给人们造成困扰,而对玻璃幕墙进行定期检测显得尤为重要。
3.中国专利申请cn201320885854.3记载了一种吸附移动式爬壁双向清洁机器人,是一种由驱动部分、变向部分、吸附部分、清洁部分、水循环部分、组成的吸附移动式爬壁双向清洁机器人,虽然能够调整方向与更换路径,可携带多种仪器设备,有双向清洗模式,但是该机器人结构复杂,螺杆和电磁阀等不易控制,且该机器人无法实现越障功能。
4.中国专利申请cn200920283411.0记载了一种高层建筑外壁面清洁机器人,由清洁机构、壁面吸附机构、机器人越障机构、机器人支援系统和gps位姿跟踪控制系统构成,是一种高层建筑外玻璃幕墙清洁机器人,该机器人的行走越障机构为飞行器,由于机器人在高空作业,靠吸附装置与壁面接触,飞行器越障后下落吸附会造成工作的不稳定性,一旦坠落将造成严重事故,且对飞行器的控制要求较高。
技术实现要素:
5.为了克服上述现有技术存在的问题,本发明的目的在于提供一种应用于垂直平面的可越障移动吸附装置,能够通过真空泵控制吸盘在垂直平面上移动及越障,并携带清洁刷及检测模块,对高层建筑玻璃幕墙进行清洁和检测,功能性强、高效省力、节约成本,适用范围广。
6.本发明的目的可以通过以下技术方案实现:
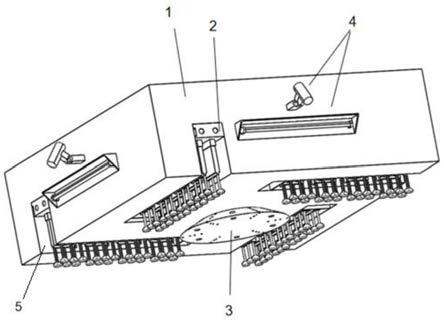
7.一种应用于垂直平面的可越障移动吸附装置,包括壳体1,所述壳体1内集成有控制器及电源供电模块,壳体1四周侧壁安装有图像采集模块4,壳体1的底部中间设有清扫组件3,清扫组件3四周均匀布置有安装槽5,安装槽5在壳体1底部呈中心对称设置,且安装槽5一端开口于壳体1边缘,安装槽5内设有移动吸附组件2。
8.所述移动吸附组件2包括沿安装槽5长度方向设置的伸缩基座6,伸缩基座6一侧壁设有第一齿条槽13,第一齿条槽13内啮合有第一齿轮14,第一齿轮14中心通过传动轴与齿
轮电机18的动力输出端相连接,齿轮电机18的固定端固定于安装槽5内侧壁;伸缩基座6内设有滑轨15,滑轨15与安装槽5封闭端水平设置的滑杆16相适配连接,安装槽5的封闭端与伸缩基座6的封闭端之间还连接有伸缩弹簧17;伸缩基座6内还安装有真空泵7,真空泵7抽吸口通过电磁阀8与若干空心伸缩杆9的固定端相连,空心伸缩杆9的伸缩端穿过伸缩装置11与吸盘10相连接;伸缩装置11的外夹层11
‑
1固定于电磁阀8上,伸缩装置11的中间伸缩层11
‑
2与空心伸缩杆9伸缩端的外周固定连接,伸缩装置11外夹层11
‑
1一侧设置有伸缩电机12,伸缩电机12的动力输出端连接有第二齿轮12
‑
1,第二齿轮12
‑
1与中间伸缩层11
‑
2一侧的第二齿条槽11
‑
3相啮合。
9.所述清扫组件3包括清洁刷头3
‑
1,清洁刷头3
‑
1底端设有若干电控喷头3
‑
2,电控喷头3
‑
2顶端与清洁刷头3
‑
1顶部的清洁液盒3
‑
3相连通,清洁刷头3
‑
1顶部正中与清洁电机3
‑
4的动力输出端相连接,清洁电机3
‑
4的底座固定于壳体1底部中间。
10.所述图像采集模块4包括活动连接于壳体1侧壁的灯罩4
‑
1,灯罩4
‑
1的下方安装有探照灯管4
‑
2,灯罩4
‑
1上方安装有摄像头自动支架4
‑
3,摄像头自动支架4
‑
3顶端安装有摄像头4
‑
4。
11.所述单个移动吸附组件2上连接的吸盘10的吸力大于装置重量。
12.所述摄像头自动支架4
‑
3可根据需求转动调整角度。
13.所述探照灯管4
‑
2采用紫光探照灯光源。
14.所述电源供电模块为整个装置供电,图像采集模块4的信号输出端与控制器的信号输入端相连接,控制器的信号输出端与图像采集模块4信号输入端相连接,控制图像采集模块4的摄像头自动支架4
‑
3调整转动角度;控制器的信号输出端通过电磁阀8控制真空泵7的工作状态,控制器的信号输出端分别通过电机控制器控制伸缩电机12、齿轮电机18与清洁电机3
‑
4的工作状态,控制器的信号输出端与电控喷头3
‑
2的信号输入端相连接,控制电控喷头3
‑
2的工作状态。
15.与现有技术相比,本发明的有益效果在于:
16.本发明在控制器的控制下,通过移动吸附组件中的真空泵7及吸盘10实现对物体表面的吸附,通过伸缩电机12、齿轮电机18与真空泵7及吸盘10配合实现装置在平面移动及越障,清扫组件3可实现垂直平面的移动清扫,通过图像采集模块4采集环境情况数据,传输至控制器处理,一方面对玻璃外墙进行检测,另一方面控制移动吸附组件2、清扫组件3的协同工作,对外墙进行清洁,操作方便、结构轻巧、清洁彻底、智能省力,且实用高效。
附图说明
17.图1为本发明的三维结构示意图。
18.图2为本发明的正视图。
19.图3为本发明的仰视图。
20.图4为本发明的移动吸附组件2的结构图。
21.图5为本发明的伸缩装置11的结构图。
22.图6为本发明的伸缩装置11的剖视图。
23.图7为本发明的清扫组件3的结构图。
24.图8为本发明的图像采集模块4的结构图。
25.图9为本发明的控制系统示意图。
26.图10为本发明的清扫流程示意图。
27.图11为本发明的运动方向示例图。
28.图12为本发明的移动吸附流程示意图。
29.图13为本发明的攀爬越障流程示意图。
30.图中:1、壳体;2、移动吸附组件;3、清扫组件;3
‑
1、清洁刷头;3
‑
2、电控喷头;3
‑
3、清洁液盒;3
‑
4、清洁电机;4、图像采集模块;4
‑
1、灯罩;4
‑
2、探照灯管;4
‑
3、摄像头自动支架;4
‑
4、摄像头;5、安装槽;6、伸缩基座;7、真空泵;8、电磁阀;9、空心挺杆;10、吸盘;11、伸缩装置;11
‑
1、外夹层;11
‑
2、中间伸缩层;11
‑
3、第二齿条槽;12、伸缩电机;12
‑
1、第二齿轮;13、齿条槽;14、第一齿轮;15、滑轨;16、滑杆;17、伸缩弹簧;18、齿轮电机。
具体实施方式
31.下面将结合附图,对本发明做进一步清楚完整的描述。
32.参见图1至图3,一种应用于垂直平面的可越障移动吸附装置,包括壳体1,所述壳体1内集成有控制器及电源供电模块,壳体1四周侧壁安装有图像采集模块4,壳体1的底部中间设有清扫组件3,清扫组件3四周均匀布置有安装槽5,安装槽5在壳体1底部呈中心对称设置,且安装槽5一端开口于壳体1边缘,安装槽5内设有移动吸附组件2。
33.参见图4至图6,所述移动吸附组件2包括沿安装槽5长度方向设置的伸缩基座6,伸缩基座6一侧壁设有第一齿条槽13,第一齿条槽13内啮合有第一齿轮14,第一齿轮14中心通过传动轴与齿轮电机18的动力输出端相连接,齿轮电机18的固定端固定于安装槽5内侧壁;伸缩基座6内设有滑轨15,滑轨15与安装槽5封闭端水平设置的滑杆16相适配连接,安装槽5的封闭端与伸缩基座6的封闭端之间还连接有伸缩弹簧17;伸缩基座6内还安装有真空泵7,真空泵7抽吸口通过电磁阀8与若干空心伸缩杆9的固定端相连,空心伸缩杆9的伸缩端穿过伸缩装置11与吸盘10相连接;伸缩装置11的外夹层11
‑
1固定于电磁阀8上,伸缩装置11的中间伸缩层11
‑
2与空心伸缩杆9伸缩端的外周固定连接,伸缩装置11外夹层11
‑
1一侧设置有伸缩电机12,伸缩电机12的动力输出端连接有第二齿轮12
‑
1,第二齿轮12
‑
1与中间伸缩层11
‑
2一侧的第二齿条槽11
‑
3相啮合。
34.参见图7,所述清扫组件3包括清洁刷头3
‑
1,清洁刷头3
‑
1底端设有若干电控喷头3
‑
2,电控喷头3
‑
2顶端与清洁刷头3
‑
1顶部的清洁液盒3
‑
3相连通,清洁刷头3
‑
1顶部正中与清洁电机3
‑
4的动力输出端相连接,清洁电机3
‑
4的底座固定于壳体1底部中间。
35.参见图8,所述图像采集模块4包括活动连接于壳体1侧壁的灯罩4
‑
1,灯罩4
‑
1的下方安装有探照灯管4
‑
2,灯罩4
‑
1上方安装有摄像头自动支架4
‑
3,摄像头自动支架4
‑
3顶端安装有摄像头4
‑
4。
36.所述单个移动吸附组件2上连接的吸盘10的吸力大于装置重量。
37.所述摄像头自动支架4
‑
3可根据需求转动调整角度。
38.所述探照灯管4
‑
2采用紫光探照灯光源,使得玻璃裂纹更加清晰可见。
39.参见图9,所述电源供电模块为整个装置供电,图像采集模块4的信号输出端与控制器的信号输入端相连接,控制器的信号输出端与图像采集模块4信号输入端相连接,控制图像采集模块4的摄像头自动支架4
‑
3调整转动角度;控制器的信号输出端通过电磁阀8控
制真空泵7的工作状态,控制器的信号输出端分别通过电机控制器控制伸缩电机12、齿轮电机18与清洁电机3
‑
4的工作状态,控制器的信号输出端与电控喷头3
‑
2的信号输入端相连接,控制电控喷头3
‑
2的工作状态。
40.参加图10至图12,本发明既可应用于垂直玻璃平面,也可用于攀爬一定的障碍物,具体工作原理为:
41.图像采集模块4采集玻璃外墙平面环境状况数据,并将数据传输至控制器判断是否有障碍物或裂缝,若有障碍物,则进行越障攀爬或避障,有裂缝则进行数据回传;若无障碍物,则控制移动吸附组件及清扫组件进行移动和清洁;直至整个垂直平面清扫完毕。
42.当需要吸附在垂直玻璃平面时:
43.将装置放置到垂直玻璃平面后,开启装置,硬件初始化后开始工作,若干个吸盘10紧贴在玻璃表面,伸缩基座6内的真空泵7工作,电磁阀8打开,抽空吸盘10内的空气,使其产生真空负压,进而吸附于玻璃表面。
44.参见图11,当需要移动时:(
①
、
②
、
③
、
④
表示方向)以向
①
方向移动为例:
45.1)除
①
侧移动吸附组件2以外的其他三组移动吸附组件2内的真空泵保持工作状态;
46.2)
①
侧移动吸附组件2的真空泵停止工作,同时打开电磁阀8,吸盘10内的压力回升,不能再吸附于垂直平面上,吸盘10脱离垂直平面;
47.3)
①
侧移动吸附组件2的齿轮电机18带动齿轮14转动,进而通过齿条槽13带动伸缩基座6沿水平设置的滑杆16移动,带动移动侧移动吸附组件整体移动,当移动至设定距离后,移动侧移动吸附组件2的电磁阀8关闭,真空泵7重新开始工作,吸盘10内产生负压,重新吸附在垂直表面上;
48.4)与
①
侧移动吸附组件2垂直方向的
②
、
③
移动吸附组件2的真空泵7停止工作,电磁阀8打开,吸盘10内的压力回升,吸盘10脱离吸附在垂直表面上;
49.5)
①
侧移动吸附组件2的齿轮电机18反向转动,同时对侧的
④
移动吸附组件2的齿轮电机18正向转动,从而,
①
侧的移动吸附组件2的缩回壳体1的安装槽5内,而对侧的
④
移动吸附组件2伸出壳体1,壳体1在两侧弹簧17辅助作用下横向移动;
50.6)达到位置后,
②
、
③
移动吸附组件2中的电磁阀8关闭,真空泵7重新工作,吸盘10吸附于垂直平面上;
51.7)对侧的
④
移动吸附组件2中的真空泵7停止工作,电磁阀8打开,吸盘10脱离吸附,齿轮电机18反向转动,将
④
移动吸附组件2拉回壳体1,然后,电磁阀8关闭,真空泵7重新工作,吸盘10吸附于垂直平面上,完成整个装置的某一方向的移动;
52.8)装置移动的同时,清扫组件3的电控喷头3
‑
2喷洒清洁液进行清扫。
53.参见图12,当需要越障时:
54.当装置的摄像头监测到前方有障碍物,则装置在设定的距离障碍物位置停下,并开始新一轮的移动过程;
55.当装置运动的
①
方向出现具有设定高度范围内的障碍物,伸缩装置11侧边的伸缩电机12工作,伸缩装置11的中部伸缩层纵向伸长,并带动空心伸缩杆9纵向延伸,从而使整个装置高度升高,
56.解除
①
侧的移动吸附组件2的吸盘10吸力,将
①
侧的移动吸附组件2中的伸缩装置
11缩回至可跨越障碍物高度位置,然后,将伸缩基座6伸出,跨越障碍物后,伸缩装置11伸出,真空泵使吸盘10吸附于垂直平面,
②
、
③
移动吸附组件2解除吸附,将
②
、
③
移动吸附组件2中的伸缩装置11缩回至可跨越障碍物高度位置;此时,
①
侧移动吸附组件2的齿轮电机18反向转动,同时对侧的
④
移动吸附组件2的齿轮电机18正向转动,从而,
①
侧的移动吸附组件2的缩回壳体1的安装槽5内,而对侧的
④
移动吸附组件2伸出壳体1,壳体1在两侧弹簧17辅助作用下横向移动;最后
④
移动吸附组件2解除吸附,将
④
移动吸附组件2中的伸缩装置11缩回至可跨越障碍物高度位置,
④
移动吸附组件2中的真空泵7停止工作,电磁阀8打开,吸盘10脱离吸附,齿轮电机18反向转动,将
④
移动吸附组件2拉回壳体1,然后,电磁阀8关闭,真空泵7重新工作,吸盘10吸附于垂直平面上,完成整个装置的某一方向的越障。
57.本装置可适用于不同宽度障碍物越障,当障碍物超出设定的宽度范围时,可采取分步越障的方法,移动及越障原理同上,程序设定由技术人员根据实际工作需要设定,不在本发明保护范围之列。本发明在越障方面,可以实现跨越具有一定装置障碍物,一方面可以进行玻璃的清洁工作,同时可以完成玻璃安全状况的检测。但本发明的吸附移动装置并不局限于所提出的领域,仍可应用于所有垂直表面需要实现移动吸附和越障功能的地方。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
