本实用新型涉及工业机器人应用领域,尤其涉及一种基于多工业机器人的木窗自动化生产线。
背景技术:
木窗作为一种伴随历史而逐步呈现的传统文化,在中国建筑史上有着浓墨重彩的一笔,然而,由于文化的消退、工艺的繁琐、新材料的应用、节能的要求等诸多原因,木窗曾一度淡出人们的视线,而最近新一轮绿色节能的需求、文化的回归、工艺的发展,使得木窗这一历尽沧桑的传统文化的代表再一次浮出水面。目前木窗生产为自动化机械加人工作业,存在操作难度极高,生产成本高,工人劳动强度大、生产效率低,质量无法保证等问题。
技术实现要素:
本实用新型的目的是为了克服以上现有技术存在的操作难度极高,生产成本高,工人劳动强度大、生产效率低和质量无法保证等技术问题,提供了一种基于多工业机器人的木窗自动化生产线。
本实用新型的目的通过以下的技术方案实现:一种基于多工业机器人的木窗自动化生产线,包括木板切割机、铣削搬运机械手、木图案铣削中心、边框切割机、边框搬运机械手、木窗装配台、成型搬运机械手、自动上色设备、堆垛机和立体仓储,所述木板切割机通过铣削搬运机械手与木图案铣削中心连接,所述木图案铣削中心通过铣削搬运机械手与木窗装配台连接,所述边框切割机通过边框搬运机械手与木窗装配台连接,所述木窗装配台通过成型搬运机械手与自动上色设备连接,所述自动上色设备通过成型搬运机械手与堆垛机连接,所述堆垛机与立体仓储连接。
更优的选择,还包括视觉检查系统,所述视觉检查系统包括计算机和相机,所述相机安装于木窗装配台,所述相机和成型搬运机械手均与计算机连接。
更优的选择,所述自动上色设备包括喷涂机械手和变位机,所述喷涂机械手与变位机连接,所述变位机通过成型搬运机械手与木窗装配台连接,所述变位机通过成型搬运机械手与堆垛机连接。
更优的选择,所述木窗装配台包括工作台、多个气缸、控制器、图案定位组件和边框定位组件,所述图案定位组件安装于所述工作台的中部,所述边框定位组件安装于所述图案定位组件的外侧,多个所述气缸安装于所述边框定位组件的外侧,多个所述气缸与控制器连接,所述铣削搬运机械手、所述边框搬运机械手和所述成型搬运机械手均与控制器连接。
更优的选择,所述图案定位组件包括多块图案定位板,多块所述图案定位板对称地安装于工作台中部。
更优的选择,所述边框定位组件包括多对边框定位块,多对所述边框定位块对称地安装于所述图案定位组件的外侧。
更优的选择,所述边框定位块包括纵向定位部和横向定位部,所述纵向定位部与横向定位部垂直连接,所述纵向定位部与横向定位部形成限位部。
更优的选择,还包括搬运机器人,所述木板切割机和边框切割机均与搬运机器人连接。
本实用新型相对现有技术具有以下优点及有益效果:
1、本实用新型通过木板切割机、铣削搬运机械手、木图案铣削中心(哈斯vf-2)、边框切割机、边框搬运机械手、木窗装配台、成型搬运机械手、自动上色设备、堆垛机和立体仓储,用机器加工出的木窗的质量也有较大的质量保障,保障木窗工艺的统一、生产线更稳定;降低了劳动强度、节省了人工成本优点、生产线效率更高。
2、本实用新型通过计算机和相机,筛选不良品,降低生产成本,木窗的质量也得到控制和质量保证。
3、本实用新型通过工作台、多个气缸、图案定位组件、边框定位组件和控制器,提高了边框装配的自动化程度,降低了人工劳动强度、节省了人工成本优点、生产线效率更高。
4、本实用新型通过搬运机器人,降低人工成本,提供自动化生产效率。
附图说明
图1是本实用新型的一种基于多工业机器人的木窗自动化生产线的示意图;
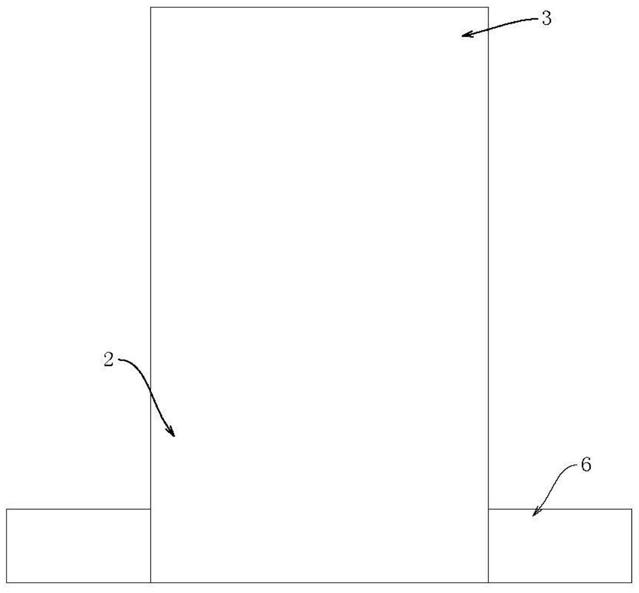
图2是本实用新型的一种基于多工业机器人的木窗自动化生产线的木窗装配台(包括边框和图案板)的示意图;
图3是本实用新型的一种基于多工业机器人的木窗自动化生产线的木窗装配台示意图;
图4是本实用新型的一种基于多工业机器人的木窗自动化生产线的木窗装配台的边框定位块示意图;
附图中各部件的标记:1、木板切割机;2、铣削搬运机械手;3、木图案铣削中心;4、边框切割机;5、边框搬运机械手;6、木窗装配台;61、工作台;62、图案定位组件;621、图案定位板;63、边框定位组件;631、边框定位块;632、横向定位部;633、纵向定位部;634、限位部;64、图案板;65、窗边框;66、气缸;7、成型搬运机械手;8、自动上色设备;81、喷涂机械手;82、变位机;9、堆垛机;10、立体仓储;11、agv搬运机器人;12、视觉检查系统;121、计算机。
具体实施方式
下面结合附图和具体实施例对本实用新型的发明目的作进一步详细地描述,实施例不能在此一一赘述,但本实用新型的实施方式并不因此限定于以下实施例。
如图1所示,一种基于多工业机器人的木窗自动化生产线,包括木板切割机1、铣削搬运机械手2、木图案铣削中心3、边框切割机4、边框搬运机械手5、木窗装配台6、成型搬运机械手7、自动上色设备8、堆垛机9、视觉检查系统12、立体仓储10和搬运机器人11,木板切割机1通过铣削搬运机械手2与木图案铣削中心3连接,木图案铣削中心3通过通铣削搬运机械手2与木窗装配台6连接,边框切割机4通过边框搬运机械手5与木窗装配台6连接,视觉检查系统12与木窗装配台6连接,视觉检查系统12与成型搬运机械手7连接,木窗装配台6通过成型搬运机械手7与自动上色设备8连接,自动上色设备8通过成型搬运机械手7与堆垛机9连接,堆垛机9与立体仓储10连接。木板切割机1和边框切割机4均与搬运机器人11连接。
木板切割机1为光纤激光切割机robust-fl600,其作用是通过对原木的切割,得到固定形状的木板;铣削搬运机械手2为abb机器人,型号为irb4600_40_255_c_02,其作用是对半成品的图案板64在木图案铣削中心3、木板切割机1和木窗装配台6之间搬运;木图案铣削中心3为哈斯vf-2立体加工中心,其作用是将切割玩的木板通过铣削得到图案板64;边框切割机4为光纤激光切割机robust-fl600,其作用是将原木制成窗边框65;边框搬运机械手5为abb机器人,型号为irb4600_40_255_c_03,其作用是将窗边框65从边框切割机4运输到木窗装配台6;木窗装配台6的主要作用是将窗边框65和图案板64组装起来,得到半成品木窗;成型搬运机械手7为abb机器人,型号为irb4600_40_255_c_04,其作用是将半成品的木窗运输到自动上色设备8或者将成品木窗运输到堆垛机9;自动上色设备8包括变位机82和喷涂机械手81,喷涂机械手81为abb喷涂机械手,自动上色设备8的作用是将半成品木窗进行上色,得到成品木窗;堆垛机9的主要作用是将成品木窗放入到立体仓储10内;视觉检查系统12的主要作用是判断半成品木窗是否合格;立体仓储10的主要作用是用于储存成品的木窗;搬运机器人11为agv搬运机器人,给边框切割机4和木板切割机1输送原木。
视觉检查系统12包括计算机121和相机(未显示),相机安装于木窗装配台6的上方,相机和成型搬运机械手7均与计算机121连接。自动上色设备8包括喷涂机械手81和变位机82,成型搬运机械手7与变位机82连接,喷涂机械手81与变位机82连接。
木窗装配台6包括工作台61、4个气缸66、控制器、图案定位组件61和边框定位块63,该控制器为plc控制器,图案定位组件61包括4块图案定位板621,4块图案定位板621对称地安装于工作台61中部,图案定位板621用于图案板64的固定。边框定位块63包括4对边框定位块,每个边框定位块包括纵向定位部633和横向定位部632,纵向定位部633的一端与横向定位部632的一端垂直连接,纵向定位部633和横向定位部632形成限位部634,限位部634用于对窗边框65的两端定位;4对边框定位块对称地安装于所述图案定位组件61的外侧并固定在工作台上,4个气缸66分别安装于每对边框定位块63的外侧中部,4个气缸66通过电磁阀与plc控制器连接。
木窗装配台6的工作流程:铣削搬运机械手2将图案板64放到4块图案定位板621之间,图案定位板621对图案板64起定位作用,边框搬运机械手5再将4块边框分别放到8块边框定位块上,窗边框65的两端被边框定位块限位,4块边框处于互相垂直状态。装置启动时,plc控制器通过电磁阀控制4个气缸66的气杆伸出并推动4个窗边框65向图案板64靠近,窗边框65本体与图案板64组合,窗边框65两端互相垂直组合,完成半成品的木窗,plc控制器通过电磁阀控制4个气缸66的气杆缩回放开半成品的木窗。
一种基于多工业机器人的木窗自动化生产线的工作流程:agv搬运机器人11将原木放到木板切割机1的传送带的前端,原木由传送带输送到木板切割机1内,木板切割机1将原木切割成设定的木板形状,得到半成品图案板64,并将其通过传送带输送到传动带末端,当传送带末端有半成品图案板64时,木板切割机1会停止工作。铣削搬运机械手2从传送带末端抓取半成品图案板64,放入图案铣削中心进行铣削精加工,得到成品图案板64。铣削搬运机械手2从图案铣削中心抓取成品图案板64,再将成品图案板64放到木窗装配台6上。同时agv搬运机器人11也将原木运输到边框切割机4的传送带的前端,传送带将原木运输到边框切割机4内,原木切割成窗边框65,并将窗边框65传送到传送带的末端,当传送带末端存在窗边框65时,边框切割机4停止工作。木窗装配台6下达指令给边框搬运机械手5,边框搬运机械手5将窗边框65从边框切割机4的传送带末端取出并放到木窗装配台6上。当窗边框65和图案板64都放入木窗装配台6上,木窗装配台6开始进行装配,得到半成品木窗。视觉检查系统12通过相机对半成品木窗确认是否合格;判定不合格,半成品木窗放到不良品存放处,判定合格,则视觉检查系统12的计算机121下达指令给成型搬运机械手7,将半成品的木窗从木窗装配台6放到变位机82上。喷涂机械手81对半成品木窗进行喷涂上色,得到成品木窗。成型搬运机械手7将成品木窗从变位机82放到堆垛机9上。堆垛机9将成品木窗放入到立体仓储10的单元格内。
上述具体实施方式为本实用新型的优选实施例,并不能对本实用新型进行限定,其他的任何未背离本实用新型的技术方案而所做的改变或其它等效的置换方式,都包含在本实用新型的保护范围之内。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。