一种u肋打磨系统
技术领域
1.本实用新型涉及u肋的焊接打磨技术领域,尤其涉及一种u肋打磨系统。
背景技术:
2.钢箱梁是桥梁承重结构中的重要组成部分,主要用于提供支撑,避免桥梁变形。钢箱梁一般由u肋和底板焊接而成。
3.在钢箱梁的加工制作过程中,由于钢箱梁的加工制作往往需要很多根u肋,一般u肋的长度为12
‑
20米,现场为节省存放空间,同一规格的u 肋均成摞叠放,导致上下两根u肋之间的空隙很小,加上u肋自重较大,目前还没有专门针对u肋进行上下料的自动化设备,通常是靠人工通过操作天车的方式,在需要焊接时自上而下一根一根的取下来放于底板或者放于焊接前的其它工序设备上,因此导致钢箱梁的生产中人力成本较高,而且工作效率非常低。另外,在焊接前,为减少u肋与桥面板连接缝焊出现焊接缺陷,在角焊缝施焊前需对u肋腹板边缘侧进行打磨除锈。由于u肋两侧的腹板不平行,且腹板的厚度不一,目前u肋打磨主要依靠工人手持电动工具进行打磨,人工打磨不仅效率低、精度低,而且打磨区域的粉尘大,作业环境艰苦。
技术实现要素:
4.为解决上述技术问题之一,本实用新型公开了一种u肋打磨系统,可以实现u肋的高效取料或者码放作业,而且可以实现自动化的打磨除锈,节省了人力成本,同时还可以大大提高钢箱梁的焊接作业中的整体工作效率。
5.本实用新型是通过以下技术方案实现的实用新型目的,一种u肋打磨系统,包括u肋堆取料机、传送装置及u肋打磨机;所述u肋堆取料机为两台,分别设于待取u肋长度方向上的两侧,取料时两台所述u肋堆取料机分别作用于待取u肋的两个端部,并且两台所述u肋堆取料机配合作业,将待取u 肋的两端同时抬起并转移;所述传送装置布置于所述u肋堆取料机的移动范围之内,所述u肋堆取料机取完一根u肋后放于所述传送装置上;所述u肋打磨机用于打磨u肋的腹板的预设区域;所述传送装置与所述u肋打磨机紧邻布置,所述传送装置可将放于其上的u肋传送至打磨机进行打磨。
6.在上述技术方案的基础上,本实用新型还公开了以下进一步的改进方案。
7.进一步,所述u肋堆取料机包括行走部、横移部及升降部;所述行走部沿u肋的长度方向行走移动;所述横移部安装于所述行走部上,并可在所述行走部上沿垂直于所述u肋的长度方向上行走移动;所述升降部安装于所述横移部上,并可在所述横移部上沿竖直方向上上下移动;通过所述行走部、所述横移部及所述升降部各自的移动,使得所述升降部作用于u肋的一端,完成堆取作业。
8.进一步,所述行走部包括行走底座及横梁;所述行走底座为两个,分别设于所述横梁的两端;所述行走底座上设有行走轮及与其驱动连接的行走驱动装置。
9.进一步,所述横移部包括立梁、横移导轨及固定于所述立梁上的横移滑座;所述立
梁通过所述横移滑座活动连接于所述行走部上;所述横移导轨为直线导轨,沿垂直于所述行走部的运行方向上水平固定安装于所述行走部上;所述横移滑座与所述横移导轨配合且滑动连接。
10.进一步,所述横移部还包括横移驱动装置及横移齿条;所述横移驱动装置固定安装于所述立梁上,所述横移齿条水平固定安装于所述横移部上;所述横移驱动装置上传动连接有横移齿轮,所述横移齿轮与所述横移齿条配合且传动连接;在所述横移驱动装置的驱动下,所述立梁可沿所述横移导轨水平移动。
11.进一步,所述升降部包括升降驱动装置、升降座、升降导轨及取料板;所述升降驱动装置固定安装于所述横移部上,并与所述升降座传动连接;所述升降导轨为直线导轨,沿竖直方向上固定安装于所述横移部上;所述升降座与所述升降导轨配合且滑动连接;所述取料板固定连接于所述升降座上,所述取料板用于插入u肋的顶板下侧进行堆取作业;在所述升降驱动装置的驱动下,可带动所述升降座沿所述竖直导轨上下移动,进而带动所述取料板上下移动。
12.进一步,所述升降驱动装置传动连接有升降丝杠,所述升降座上安装有与所述升降丝杠配合的固定螺母,通过所述升降驱动装置带动所述升降丝杠旋转进而驱动所述升降座上下移动。
13.进一步,所述取料板设于所述升降座底部,并向前伸出;
14.所述升降座的前侧,安装有u肋检测元件,所述u肋检测元件位于所述取料板的上方。
15.进一步,所述升降座的前侧安装有悬臂支架,所述u肋检测元件安装于所述悬臂支架上,所述u肋检测元件与所述升降座前侧间的距离大于所述取料板的前端面与所述升降座前侧面间的距离;所述取料板与所述u肋检测元件的相对位置为预先设定值;所述u肋检测元件对u肋的检测方式为向下检测。
16.进一步,所述u肋检测元件数量为一个,位于所述取料板的正上方靠前的预设位置,用于检测u肋的顶面;或
17.所述u肋检测元件数量为两个,分别位于所述取料板的正上方的两侧且靠前的预设位置,用于检测u肋的两侧壁;或
18.所述u肋检测元件数量为三个,分别位于所述取料板的正上方以及正上方的两侧且靠前的预设位置,分别用于检测u肋的顶板及两侧壁。
19.进一步,所述升降座的前侧设有用于将u肋压紧在取料板上的压下装置;所述压下装置包括压下气缸、压头及压下滑轨;所述压下气缸的缸筒部固定安装于所述升降座上,所述压下气缸的缸杆朝下并与所述压头连接;所述压下滑轨竖直安装于所述升降座的前侧;所述压头与所述压下滑轨配合且滑动连接。
20.进一步,所述升降座底部还设有限制取料板插入u肋内部深度的止停机构;所述止停机构包括顶板、连接轴、止停安装座、复位弹簧及止停开关;所述顶板设于所述升降座的前侧,所述顶板的一端与所述取料板的顶部滑动连接,另一端与所述连接轴固定连接;所述连接轴穿过所述升降座,在所述升降座的后侧与所述止停开关可触发连接;所述止停安装座安装于所述升降座的背侧,所述止停开关安装于所述止停安装座上,所述止停开关与所述行走部电连接;所述复位弹簧安装于所述止停安装座内并套设于所述连接轴上;所述顶
板被u肋向后顶住后,带动所述连接轴向后移动,进而触发所述止停开关,通过控制系统控制所述行走部停止前进。
21.进一步,所述u肋打磨机,包括机架、第一导轨及打磨部;所述第一导轨为直线导轨,水平固定安装于所述机架上,所述第一导轨的长度方向与待打磨u肋的行进方向垂直;所述打磨部通过所述第一导轨活动连接于所述机架,所述打磨部可沿所述第一导轨移动;所述打磨部包括打磨组件及角度调节组件;所述打磨组件用于打磨u肋的腹板边缘部;所述打磨组件可在所述角度调节组件的调节下改变打磨角度,以适应u肋。
22.进一步,所述打磨部还包括打磨座及横移调整组件,所述打磨组件及所述角度调节组件均安装于所述打磨座上;所述打磨座与所述第一导轨配合且活动连接;所述横移调整组件固定安装于所述机架,同时与所述打磨座传动连接。
23.进一步,所述横移调整组件包括第一丝杠、第一螺母、手柄及轴承座;所述第一螺母固定安装于所述打磨座;所述轴承座固定安装于所述机架;所述第一丝杠通过所述轴承座与所述第一螺母配合连接;所述第一丝杠的端部安装有所述手柄;旋转所述手柄,可驱动所述打磨座沿所述第一导轨移动。
24.进一步,所述打磨组件包括打磨架及两个相对布置的第一打磨头;所述打磨架通过转轴转动连接于所述打磨座上,所述转轴的轴线方向与u肋的运行方向平行;两个所述第一打磨头均安装于所述打磨架上,通过两个所述第一打磨头可对u肋的其中一侧腹板的内外表面同时打磨;所述角度调节组件安装于所述打磨座及打磨架之间。
25.进一步,所述打磨组件还包括第二导轨及伸缩机构;所述第二导轨固定安装于所述打磨架上;用于打磨u肋腹板内侧的所述第一打磨头为固定头,用于打磨u肋腹板外侧的所述第一打磨头为活动头,所述活动头下侧设有活动头座,所述活动头座滑动连接于所述第二导轨;所述伸缩机构一端固定于所述打磨架,另一端固定于所述活动头座,通过所述伸缩机构可驱动所述活动头座沿所述第二导轨移动,进而调节所述活动头与所述固定头之间的间距。
26.进一步,所述伸缩机构为气缸或电动推杆。
27.进一步,所述第一打磨头为砂轮、砂带轮、钢丝轮及千叶轮中的一种或两种的组合。
28.进一步,两个所述第一打磨头各自通过一对同步带轮及第一电机独立驱动,两个所述第一打磨头均布置于所述同步带轮及所述第一电机的上方。
29.进一步,所述第一打磨头为激光喷头或喷砂头中的一种或两种的组合。
30.进一步,所述打磨组件还包括两个第二打磨头;两个所述第二打磨头相对布置并且设于两个所述第一打磨头的进料侧或出料侧;所述第一打磨头为砂轮、砂带轮、钢丝轮及千叶轮中的一种或两种的组合,所述第二打磨头为激光喷头或喷砂头中的一种或两种的组合。
31.进一步,所述打磨组件还包括两个第二打磨头;两个所述第二打磨头相对布置并且设于两个所述第一打磨头的进料侧或出料侧;所述第一打磨头为激光喷头或喷砂头中的一种或两种的组合,所述第二打磨头为砂轮、砂带轮、钢丝轮及千叶轮中的一种或两种的组合。
32.进一步,所述打磨组件还包括集尘罩及除尘系统,所述集尘罩罩设于所述第一打
磨头外部,并与所述除尘系统通过管道连通。
33.进一步,所述打磨组件还包出入检测元件;
34.所述出入检测元件设于所述第一打磨头的入料侧,用于检测是否有u肋进入。
35.进一步,所述角度调节组件包括第二丝杠、第二螺母及第二电机;所述第二丝杠与所述第二电机传动连接,并且两者均安装于所述打磨座上;所述第二螺母固定安装于所述打磨架上;所述第二丝杠与所述第二螺母配合连接。
36.进一步,所述打磨部为两个,沿u肋的运行方向并排且相对布置,两个所述打磨部分别用于打磨u肋的两个腹板。
37.进一步,所述u肋打磨机还包括多个导向轮轴,多个所述导向轮轴分别布置于所述打磨部的两侧,用于对u肋进行导向;所述导向轮轴上设有两个导向槽或导向凸棱。
38.本实用新型公开的一种u肋打磨系统,包括u肋堆取料机、传送装置及 u肋打磨机;所述u肋堆取料机为两台,分别设于待取u肋长度方向上的两侧,取料时两台所述u肋堆取料机分别作用于待取u肋的两个端部,并且两台所述u肋堆取料机配合作业,将待取u肋的两端同时抬起并转移;所述传送装置布置于所述u肋堆取料机的移动范围之内,所述u肋堆取料机取完一根u肋后放于所述传送装置上;所述u肋打磨机用于打磨u肋的腹板的预设区域;所述传送装置与所述u肋打磨机紧邻布置,所述传送装置可将放于其上的u肋传送至打磨机进行打磨。通过本实用新型所公开的一种打磨系统,不仅可以解决u肋的上下料(堆取)问题,而且可以通过堆取料机取完料后直接放于传送装置,再自动送入u肋打磨机进行自动打磨,整个过程几乎不需人工操作,也省去了动用车间天车吊取u肋的繁琐工作,使得钢箱梁的加工制造效率大大提高。
39.另外,本实用新型所公开的一种u肋堆取料机,包括行走部、横移部及升降部;所述行走部可沿u肋的长度方向行走移动;所述横移部安装于所述行走部上,并可在所述行走部上沿垂直于所述u肋的长度方向上行走移动;所述升降部安装于所述横移部上,并可在所述横移部上沿竖直方向上上下移动;通过所述行走部、所述横移部及所述升降部各自的移动,使得所述升降部作用于u肋的一端,完成堆取作业。
40.具体的,可以在u肋两端分别设置一台本实用新型所公开的u肋堆取料机,通过该u肋堆取料机上设置的可升降的取料板,在对待取的u肋进行精准定位后,将取料板准确插入两根u肋之间的空隙,最后通过取料板的升降,实现u肋的自动化取料和卸料,进而提高工作效率。可以解决u肋自动上下料的难题,
41.本实用新型利用传感器检测到u肋两端的侧壁,对两根u肋之间的空隙进行定位,实现将取料板对准两根u肋之间的空隙,分别沿立梁、横梁进行自动移动,将待取料的u肋与其它u肋分开,可实现u肋的自动上下料,大大提高了钢箱梁的整体焊接的工作效率。
42.本实用新型所提供的一种u肋打磨机,可以实现u肋的两腹板的自动化打磨,并且可以通过调节打磨架的倾斜角度,调整砂轮的打磨端面与u肋腹板待打磨区域平行,实现对u肋两侧腹板端部的倾斜面进行自动打磨。
附图说明
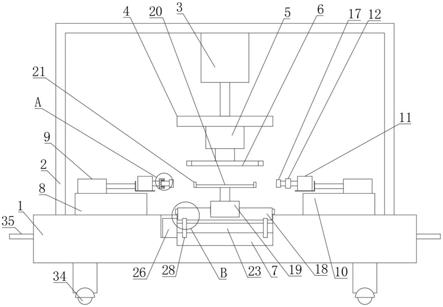
43.图1为本实用新型公开的一种u肋打磨系统的具体实施方式的整体结构示意图;
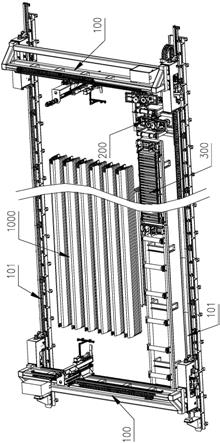
44.图2为所述的一种u肋堆取料机的具体实施方式的整体结构示意图;
45.图3为图2所示u肋堆取料机的另一个角度的立体示意图;
46.图4、图5为所述升降部的局部结构示意图;
47.图6为所述的一种u肋打磨机的具体实施方式立体结构示意图;
48.图7为图6所示u肋打磨机的俯视结构示意图。
49.其中,图中件号表示为:
50.100、u肋堆取料机,101、行走轨道,111、行走底座,112、横梁,121、立梁,122、横移导轨,123、横移滑座,124、横移驱动装置,125、横移齿条,131、升降驱动装置,132、升降座,133、升降导轨,134、取料板,136、升降丝杠,137、u肋检测元件,138、悬臂支架,139、压下气缸,140、压头,141、压下滑轨,142、顶板,143、连接轴,144、止停安装座,145、复位弹簧,146、止停开关;
51.300、传送装置,1000、u肋;
52.200、u肋打磨机,201、机架,202、第一导轨,203、打磨座,204、第一丝杠,205、手柄,206、轴承座,207、打磨架,208、第一打磨头,2081、固定头,2082、活动头,209、转轴,210、第二导轨,211、伸缩机构,212、活动头座,213、同步带轮,214、第一电机,215、第二打磨头,216、集尘罩,217、出入检测元件,218、第二丝杠,219、第二螺母,220、第二电机, 221、导向轮轴,222、凸棱。
具体实施方式
53.下面将参考附图并结合实施例来详细说明本实用新型。以下结合附图对本实用新型的原理和特征进行描述,需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
54.请参考图1至图7,图1为本实用新型公开的一种u肋打磨系统的具体实施方式的整体结构示意图;图2为所述的一种u肋堆取料机的具体实施方式的整体结构示意图;图3为图2所示u肋堆取料机的另一个角度的立体示意图;
55.图4、图5为所述升降部的局部结构示意图;图6为所述的一种u肋打磨机的具体实施方式立体结构示意图;图7为图6所示u肋打磨机的俯视结构示意图。
56.本实用新型公开的一种u肋打磨系统,包括u肋堆取料机100、传送装置300及u肋打磨机200。
57.对于u肋堆取料机100,其行走方式可以为轨道式,也可以采用无轨方式,如采用胶轮的方式。本实用新型以有轨方式进行阐述。
58.具体的,所述u肋堆取料机100为两台,分别设于待取u肋1000长度方向上的两侧,所述堆取料机100设有行走轨道101,两台所述u肋堆取料机100均可沿所述行走轨道101移动;取料时两台所述u肋堆取料机100分别作用于待取u肋1000的两个端部,并且两台所述u肋堆取料机100配合作业,将待取u肋1000的两端同时抬起并转移;所述传送装置300布置于所述u肋堆取料机100的移动范围之内,所述u肋堆取料机100取完一根u 肋后放于所述传送装置300上;所述u肋打磨机200用于打磨u肋1000的腹板的预设区域(u肋1000的两腹板端部的内外表面);所述传送装置300 与所述u肋打磨机200紧邻布置,所述传送装置300可将放于其上的u肋传送至所述u肋打磨机200进行打磨。
59.其中,传送装置300可以为辊道式传送机构,其布置方向与u肋1000 的码放长度平行,以方便u肋堆取料机100取完u肋1000后直接放于其上。传送装置300与u肋打磨机200相接布置,放于传送装置300上的u肋1000 可以直接送入u肋打磨机200进行打磨。
60.本实用新型所公开的一种u肋堆取料机100,用于堆放或提取u肋1000,其一种具体实施方式为,包括行走部、横移部及升降部;所述行走部设有行走轨道101,所述行走部可在所述行走轨道101上沿u肋1000的长度方向行走移动;所述横移部安装于所述行走部上,并可在所述行走部上沿垂直于所述u肋的长度方向上行走移动;所述升降部安装于所述横移部上,并可在所述横移部上沿竖直方向上上下移动;通过所述行走部、所述横移部及所述升降部各自的移动,使得所述升降部作用于u肋的一端,完成堆取作业。
61.其中,另一种具体实施方式中,也可以将升降部设于行走部上,横移部安装于升降部上,由横移部作为执行终端进行u肋1000的起吊。
62.通过所述行走部、所述横移部及所述升降部各自的移动,可以实现将u 肋在其长度方向上、垂直于其长度的方向上以及竖直方向上三个自由度的动作,进而实现u肋的取料或者码放作业。
63.具体来说,在该u肋堆取料机的具体实施方式中,所述行走部包括行走底座111及横梁112;所述行走底座111为两个,分别设于所述横梁112的两端;所述行走底座111上设有行走驱动装置及行走轮,所述行走轮在所述行走驱动装置的驱动下沿所述行走轨道101行驶。根据行走部所移动的距离,在u肋两端的堆取料机下的行走轨道101可以为整体式,也可以为独立的两段。设置行走轨道101,可以使得行走过程中更稳定,承载力也更强。横梁 112的长度一般要超过u肋的码放区的宽度,确保横移部能够移动到任意一排u肋的位置。
64.所述横移部包括立梁121、横移导轨122及固定于所述立梁121上的横移滑座123;所述立梁121通过所述横移滑座123活动连接于所述行走部上;所述横移导轨122为直线导轨,沿垂直于所述行走部的运行方向上水平固定安装于所述行走部上;所述横移滑座123与所述横移导轨122配合且滑动连接。
65.通过驱动横移滑座123,可以使其在横移导轨122上也即在横梁112上横向移动,进而将u肋进行横向转移,为确保移动的平稳性,可以通过齿轮齿条的传动方式实现。具体为,所述横移部还包括横移驱动装置124及横移齿条125;所述横移驱动装置124固定安装于所述立梁121上,所述横移齿条125水平固定安装于所述横移部上;所述横移驱动装置124上传动连接有横移齿轮,所述横移齿轮与所述横移齿条125配合且传动连接;在所述横移驱动装置124的驱动下,所述立梁121可沿所述横移导轨122水平移动。通过这种方式,不仅可以实现移动的平稳性,而且由于是齿轮齿条的啮合传动形式,可以实现精确控制,以确保定位准确,实现智能化无人操作。
66.所述升降部包括升降驱动装置131、升降座132、升降导轨133及取料板134;所述升降驱动装置131固定安装于所述横移部上,并与所述升降座 132传动连接;所述升降导轨133为直线导轨,沿竖直方向上固定安装于所述横移部上;所述升降座132与所述升降导轨133配合且滑动连接;所述取料板134固定连接于所述升降座132上,所述取料板134用于插入u肋的顶板142下侧进行堆取作业;在所述升降驱动装置131的驱动下,可带动所述升降座132沿所述竖直导轨上下移动,进而带动所述取料板134上下移动。
67.为了确保升降过程的平稳,所述升降驱动装置131传动连接有升降丝杠 136,所述
升降座132上安装有与所述升降丝杠136配合的固定螺母,通过所述升降驱动装置131带动所述升降丝杠136旋转进而驱动所述升降座132 上下移动。
68.所述取料板134设于所述升降座132底部,并向前伸出;所述升降座132 的前侧,安装有u肋检测元件137,所述u肋检测元件137位于所述取料板134的上方。需要说明的是,这里所说的“前”,指的是当堆取料机置于u 肋的两端时,从u肋端部向u肋中央的方向。
69.所述升降座132的前侧安装有悬臂支架138,所述u肋检测元件137安装于所述悬臂支架138上,所述u肋检测元件137与所述升降座132前侧间的距离大于所述取料板134的前端面与所述升降座132前侧面间的距离;以确保移动过程中u肋检测元件137检测到u肋后发出控制信号。
70.所述取料板134与所述u肋检测元件137的相对位置为预先设定值;这样可以根据u肋检测元件137发回的位置信号,通过换算得出取料板134当前的位置信息,进而控制取料板134的移动。作为优选,所述u肋检测元件 137对u肋的检测方式为向下检测,也即将u肋检测元件137安装于u肋的上方,自上向下进行检测。u肋检测元件137可以为激光检测,也可以为其它方式。
71.对于u肋检测元件137的设置,可以有三种具体实施方式:1)所述u 肋检测元件137数量为一个,位于所述取料板134的正上方靠前的预设位置,用于检测u肋的顶面;2)所述u肋检测元件137数量为两个,分别位于所述取料板134的正上方的两侧且靠前的预设位置,用于检测u肋的两侧壁; 3)所述u肋检测元件137数量为三个,分别位于所述取料板134的正上方以及正上方的两侧且靠前的预设位置,分别用于检测u肋的顶板142及两侧壁。用一个u肋检测元件时,可用于检测u肋的有无,用两个u肋检测元件,可以利用u肋的两侧壁向外张开的特点用来检测u肋的两侧壁,同时还可以进行对中,用三个u肋检测元件,其中一个位于正中间,用于检测u肋的顶壁,另外两个用来检测u肋的两侧壁,用于对中,这种组合方式最为精确。
72.在取料板134取到u肋后,转移过程中容易晃动,为避免意外状况的发生,在所述升降座132的前侧还设有用于将u肋压紧在取料板134上的压下装置。
73.具体来说,所述压下装置包括压下气缸139、压头140及压下滑轨141;所述压下气缸139的缸筒部固定安装于所述升降座132上,所述压下气缸139 的缸杆朝下并与所述压头140连接;所述压下滑轨141竖直安装于所述升降座132的前侧;所述压头140与所述压下滑轨141配合且滑动连接。
74.当取料板134开始插入u肋时,为控制其插入位置,所述升降座132底部还设有限制取料板134插入u肋内部深度的止停机构。
75.具体来说,所述止停机构包括顶板142、连接轴143、止停安装座144、复位弹簧145及止停开关146;所述顶板142设于所述升降座132的前侧,所述顶板142的一端与所述取料板134的顶部滑动连接,另一端与所述连接轴143固定连接;所述连接轴143穿过所述升降座132,在所述升降座132 的后侧与所述止停开关146可触发连接;所述止停安装座144安装于所述升降座132的背侧,所述止停开关146安装于所述止停安装座144上,所述止停开关146与所述行走部电连接;所述复位弹簧145安装于所述止停安装座 144内并套设于所述连接轴143上;所述顶板142被u肋向后顶住后,带动所述连接轴143向后移动,进而触发所述止停开关146(止停开关146与控制行走部的驱动装置信号连接),通过控制系统控制所述行走部
停止前进。
76.该u肋堆取料机的堆取过程可以为,先控制行走部移动到u肋的两端,停止行走部,控制横移部沿横梁112移动到待取u肋的位置,并通过u肋检测元件137检测到u肋后,再次控制行走部向u肋的方向进给,带动取料板 134插入到上下u肋之间的孔隙中,通过止停机构,可控制插入深度插入到位后停止进给,然后控制取料板134升起,进而将u肋提起,再通过控制各移动部的动作,将u肋放于指定位置即可。
77.通过本实用新型所提供的u肋堆取料机,可以解决现有技术中只能通过人工操作天车带来的种种弊端,实现层叠码放的u肋的逐一取料并转移,也可以实现u肋的层叠码放,并且通过控制程序的设置,可以实现全自动识别与无人化操作,大大提高工作效率,并且可以减少人力成本。
78.在本实用新型公开的一种u肋打磨系统中,所述的u肋打磨机200的一种具体实施方式为,包括机架201、第一导轨202及打磨部;所述第一导轨 202为直线导轨,水平固定安装于所述机架201上,所述第一导轨202的长度方向与待打磨u肋的行进方向垂直;所述打磨部通过所述第一导轨202活动连接于所述机架201,所述打磨部可沿所述第一导轨202移动;所述打磨部包括打磨组件及角度调节组件;所述打磨组件用于打磨u肋的腹板边缘部;所述打磨组件可在所述角度调节组件的调节下改变打磨角度,以适应u肋。
79.在上述u肋打磨机200的具体实施方式中,由于u肋较长,一般为12 米以上,因此打磨时,有两种打磨方式,一是打磨设备保持不动,u肋移动,二是保持u肋不动,打磨设备移动。本实用新型公开的具体实施方式中,机架201可以安装在固定位置保持不动,通过驱动设备将待打磨u肋送入本打磨机的打磨部进行边移动边打磨即可。
80.在u肋的打磨过程中,为了调整打磨部的横向位置以及打磨的角度,以适应u肋的腹板打磨位置,可以通过手动或自动的方式调节打磨部的横向位置,使其沿第一轨道移动到合适位置,通过角度调节组件,可以调节打磨部的俯仰角,以调节打磨角度。
81.具体的,所述打磨部还包括打磨座203及横移调整组件,所述打磨组件及所述角度调节组件均安装于所述打磨座203上;所述打磨座203与所述第一导轨202配合且活动连接;所述横移调整组件固定安装于所述机架201,同时与所述打磨座203传动连接。
82.打磨座203,一方面用于承载打磨机的打磨部分,另一方面与第一导轨 202配合,起到承上启下的作用。
83.横移调整组件的实现方式可以为手动,也可以为电动。本实用新型公开了一种手动的实现方式的具体实施列,如图1和图2所示。所述横移调整组件包括第一丝杠204、第一螺母、手柄205及轴承座206;所述第一螺母(图中未示出)固定安装于所述打磨座203;所述轴承座206固定安装于所述机架201;所述第一丝杠204通过所述轴承座206与所述第一螺母配合连接;所述第一丝杠204的端部安装有所述手柄205;旋转所述手柄205,可驱动所述打磨座203沿所述第一导轨202移动。
84.因为在打磨部分的横向位置调整时,调整距离不长,因此采用丝杆螺母的传动形式,并且设置手动调节的方式,一是可以利用其自锁的特点,二是可以方便控制调整位置。由于第一丝杠204通过轴承座206安装在机架201 上,而第一螺母安装在打磨座203上,所以调整时,只需通过转动手柄205,即可将打磨座203进行横向的双方向自由调整,调节方便,并且效率高。
85.本实用新型公开的u肋打磨机200的具体实施例中,所述打磨组件包括打磨架207及两个相对布置的第一打磨头208;所述打磨架207通过转轴209 转动连接于所述打磨座203上,所述转轴209的轴线方向与u肋的运行方向平行;两个所述第一打磨头208均安装于所述打磨架207上,通过两个所述第一打磨头208可对u肋的其中一侧腹板的内外表面同时打磨;所述角度调节组件安装于所述打磨座203及打磨架207之间。
86.通过打磨架207的设置,可以将第一打磨头208安装于其上,而打磨架 207通过转轴209转动连接于打磨座203上,再利用角度调节组件,可以通过调节打磨架207,进而带动第一打磨头208进行角度调节即可。第一打磨头208设置为相对的两个,可以同时对u肋的其中一个腹板的内外表面同时打磨,以提高打磨效率。
87.上述的角度调节组件,一种优选的实施方式为,包括第二丝杠218、第二螺母219及第二电机220;所述第二丝杠218与所述第二电机220传动连接,并且两者均安装于所述打磨座203上;所述第二螺母219固定安装于所述打磨架207上;所述第二丝杠218与所述第二螺母219配合连接。该角度调节组件采用电动方式驱动丝杠螺母的方式实现调节,便于实现自动化控制。
88.作为优选,所述打磨组件还包括第二导轨210及伸缩机构211;所述第二导轨210固定安装于所述打磨架207上;用于打磨u肋腹板内侧的所述第一打磨头208为固定头2081,用于打磨u肋腹板外侧的所述第一打磨头208 为活动头2082,所述活动头2082下侧设有活动头座212,所述活动头座212 滑动连接于所述第二导轨210;所述伸缩机构211一端固定于所述打磨架 207,另一端固定于所述活动头座212,通过所述伸缩机构211可驱动所述活动头座212沿所述第二导轨210移动,进而调节所述活动头2082与所述固定头2081之间的间距。因为u肋的厚度不一,而且打磨完一根u肋,更换另一根时,u肋的横向位置也会有变化,因此,要确保每次打磨时打磨头都要能接触到u肋的腹板表面,通过上述结构,可以很方便的调节打磨头的位置,确保打磨头的位置能够始终适应u肋的位置。
89.作为优选,所述伸缩机构211为气缸或电动推杆。
90.具体的,两个第一打磨头208可以为砂轮、砂带轮、钢丝轮及千叶轮中的一种,也可以两个第一打磨头208分别选用其中一种。
91.由于砂轮、砂带轮、钢丝轮及千叶轮均为旋转式打磨轮,作为一种优选的实施方式,两个所述第一打磨头208可以各自通过一对同步带轮213及第一电机214独立驱动,两个所述第一打磨头208均布置于所述同步带轮213 及所述第一电机214的上方。采用上下的方式安装,可以利用打磨座203和打磨架207之间的空间来安装电机等驱动部件,而且打磨时可以不干涉上部的u肋,整体结构紧凑、合理,而且占用空间小。
92.所述的第一打磨头208除了用旋转式打磨轮的方式外,还可以有另一种实施方式,即第一打磨头208可以采用激光喷头或喷砂头中的一种或两种的组合。
93.为了进一步的实现打磨效果,本实用新型中的所述打磨组件还可以包括两个第二打磨头215;两个所述第二打磨头215相对布置并且设于两个所述第一打磨头208的进料侧或出料侧;所述第一打磨头208为砂轮、砂带轮、钢丝轮及千叶轮中的一种或两种的组合,所述第二打磨头215为激光喷头或喷砂头中的一种或两种的组合。采用两种打磨方式进行组合式打磨,可以使得u肋腹板的打磨精度进一步提高。
94.采用上述组合式打磨方式下,两个第一打磨头208也可以为激光喷头或喷砂头中
的一种或两种的组合,两个所述第二打磨头215为砂轮、砂带轮、钢丝轮及千叶轮中的一种或两种的组合。
95.打磨时,为了避免粉尘污染,在一种优选的实施方式中,所述打磨组件还包括集尘罩216及除尘系统,所述集尘罩216罩设于所述第一打磨头208 外部,并与所述除尘系统通过管道连通。
96.为了更好的实现智能化、自动化打磨作业,所述打磨组件还包括出入检测元件217;所述出入检测元件217设于所述第一打磨头208的入料侧,用于检测是否有u肋进入,在第一打磨头208的出料侧也可以再设置一个出入检测元件217。当待打磨u肋即将进入第一打磨头208时,位于入料侧的出入检测元件217通过传感器感应到物料后,发出信号给控制中心,由控制中心控制打磨机开始启动第一打磨头208工作,当u肋打磨完毕从打磨机离开时,位于出料侧的出入检测元件217检测到物料已离开的信号,发出信号给控制中心,再有控制中心控制打磨机停止运行。这样可以最大限度的避免空转,节省能耗,而且可以最大限度的实现自动化操作。
97.本实用新型所公开的u肋打磨机200,为了提高打磨效率,所述打磨部可以设为两个,沿u肋的运行方向并排且相对布置,两个所述打磨部分别用于打磨u肋的两个腹板,这样就可以实现u肋两侧腹板的同时打磨。可以理解的是,对于其中一个打磨部所需要的调节机构,要相应的配备。
98.打磨时,u肋倒扣着做进给运动,为了确保u肋在打磨过程中始终保持平稳进给,所述u肋打磨机还包括多个导向轮轴221,多个所述导向轮轴221 分别布置于所述打磨部的两侧,用于对u肋进行导向;所述导向轮轴221上设有两个导向槽或导向凸棱222,通过导向槽或导向凸棱222,可以将u肋的两个腹板进行定位,避免产生晃动,进而提高打磨精度,同时也可以避免因u肋晃动造成打磨机构收到撞击损伤。
99.本实用新型所公开的一种u肋打磨机,可以通过调节打磨架207的倾斜角度,调整打磨头的打磨端面与u肋腹板待打磨区域平行,实现对u肋两侧腹板端部的倾斜面进行自动打磨。与此同时,两个打磨头一个为固定、另一个活动,可以通过调节活动头2082来调整两个打磨头的打磨间距,以适用打磨不同u肋腹板厚度的变化。整个结构设计合理,结构紧凑,可以实现自动化、智能化工作,大大提高了钢箱梁的生产效率,同时节省了人力成本。
100.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
101.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
102.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特
征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
103.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
104.尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。