1.本发明涉及水下机器人领域,特别是一种用于水下机器人的绕线装置。
背景技术:
2.auv(自主式水下机器人)、arv(自主/遥控双模式水下机器人)、rov(遥控式水下机器人)等具备不同功能的水下机器人在测试和使用环节需要带缆操作。线缆一般为电力载波线或者光纤线,其一端连接在水下机器人身上,另一端与岸基箱连接,通过岸基箱可以实时控制姿态、监测程序执行等步骤,其测试所用到的线缆范围一般从几十米到几百米不等,主要在湖边、海、河、码头、科考船等户外场景下进行带缆测试和使用。但在实际使用过程中会存在以下问题:
3.1、线缆难收纳,收纳不整齐占用空间;
4.2、线缆使用后会出现缠线、弯曲、打结等情况,严重时导致部分线缆处于应力集中,长久会造成线缆损伤;
5.3、传统手工收放线缆速度慢,效率低;
6.4、使用电动设备收放线缆,遇到线缆带水、海浪、雨雪等情况,电动设备容易失效且造价昂贵,改造困难;
7.5、200
‑
300米中大长度线缆较重,运输、移动、开展工作均比较困难;
8.6、当线缆两侧均连接时,线缆每沿着绕线轮轴向旋转一圈,线缆自身也会发生周向旋转,如果不予梳理,会使线缆处于应力集中,导致线缆损坏、无法绕线的情况出现。
技术实现要素:
9.本发明的目的在于克服现有技术存在的上述缺陷,提出了一种用于水下机器人的绕线装置,其实现了整齐排线、自主收放线、移动方便、便于携带和操作,有效地防止炸线等情况发生。
10.本发明的技术方案是:一种用于水下机器人的绕线装置,其中,包括岸基箱、储物盒、光纤控制盒和绕线机构,储物盒、光纤控制盒和绕线机构位于岸基箱内,光纤控制盒通过光纤与绕线机构连接;
11.所述绕线机构包括绕线轴、滑环、左侧板、左支座、右侧板、右支座和插拔手轮,绕线轴呈空心状,绕线轴的左端设有滑环、左侧板和左支座,绕线轴的右端设有右侧板、右支座和插拔手轮,绕线轴的两端分别通过与左侧板、右侧板固定连接,绕线轴的两端外侧分别设有左支座和右支座,左支座和右支座分别通过平圆头螺栓ⅰ与岸基箱的底部固定连接,左支座和右支座内均固定设有立式轴承座;
12.所述滑环包括滑环定子端和滑环动子端,滑环定子端位于滑环动子端的外侧,滑环定子端通过光纤与光纤控制箱连接,滑环定子端的内端面与滑环动子端转动连接,滑环定子端位于左支座的立式轴承座内,滑环定子端的外侧设有滑环外端定位套筒,滑环定子端的内端设有滑环内端定位套筒,滑环外端定位套筒呈形,包括垂直固定连接的连
接板和套筒,滑环外端定位套筒的连接板与立式轴承座的外端面固定连接,滑环外端定位套筒的套筒套在滑环定子端的环形外侧,滑环内端定位套筒套在滑环定子端的环形外侧,滑环定子端的内侧端面与滑环内端定位套筒固定连接,滑环外端定位套筒与滑环内端定位套筒之间固定连接;
13.所述立式轴承座和滑环外端定位套筒之间设有左侧外轮轴,左侧板的中心设有通孔,左侧外轮轴穿过该通孔,左侧外轮轴的环形外表面设有轴肩,轴肩与立式轴承座的内表面之间设有轴用弹簧卡簧ⅰ,左侧外轮轴的内端面与左侧板的内侧端面固定连接,左侧外轮轴的内端面还与滑环保护座固定连接,滑环保护座位于滑环内端定位套筒的外侧,光纤的一端与滑环动子端连接,另一端穿过绕线轴的槽口缠绕在绕线轴上;
14.所述绕线轴的右端还设有右侧外轮轴,右侧外轮轴穿过右侧板中心的通孔,右侧外轮轴的内端面与右侧板的内侧端面固定连接,右侧外轮轴位于右支座的立式轴承座内,右侧外轮轴的环形外表面设有轴肩,轴肩与立式轴承座的内表面之间设有轴用弹簧卡簧ⅰ,右侧外轮轴的外端套有插拔手轮,立式轴承座的外侧端面与止动法兰固定连接,止动法兰套在右侧外轮轴的外侧,止动法兰内设有蝶形螺栓ⅰ,蝶形螺栓ⅰ的端部与右侧外轮轴接触。
15.本发明中,所述连接光纤控制盒和绕线机构的光纤外侧设有光纤包络管,光纤包络管的两端分别与光纤控制盒和绕线机构固定连接,光纤包络管、滑环外端定位套筒的连接板依次通过圆柱头螺栓与立式轴承座的外端面固定连接。
16.所述左侧外轮轴的外端与立式轴承座的内表面之间呈过渡配合,右侧外轮轴与立式轴承座之间呈过渡配合。
17.所述插拔手轮与右侧外轮轴之间呈间隙配合,方便插拔手轮的插入与拔出。
18.所述左支座和右支座分别固定连接有支撑架,支撑架的另一端分别固定有前端棍棒,前端棍棒的端部分别设有水密插头和水密插头固定套,水密插头和水密插头固定套呈对应设置,水密插头固定套用于固定水密插头,水密插头与光纤的自由端固定连接。
19.所述滑环动子的前端固定有“一字型”导动杆,“一字型”导动杆设置在滑环保护座的凹槽内,通过滑环保护座约束“一字型”导动杆,使滑环动子端与绕线轴保持同步运动。
20.本发明的有益效果是:
21.(1)通过插拔手轮旋转带动绕线轴转动,完成收放线缆工作;
22.(2)通过蝶形螺旋ⅰ的旋开和旋紧,控制收线缆的速度,防止炸线情况发生;
23.(3)通过固定滑环定子端,保护滑环动子端,解决线缆缠线、弯曲、打结等情况;
24.(4)通过岸基箱设计,消除线缆带水、海浪、雨雪等工况影响,针对200
‑
300米中大长度线缆较重等情况,也能够轻便的运输、移动以及开展工作;
25.(5)该装置简单可靠、结构紧凑、便携方便、便于操作、价格低廉,所缠线缆最多可达360米,能够适应恶劣工况环境。
附图说明
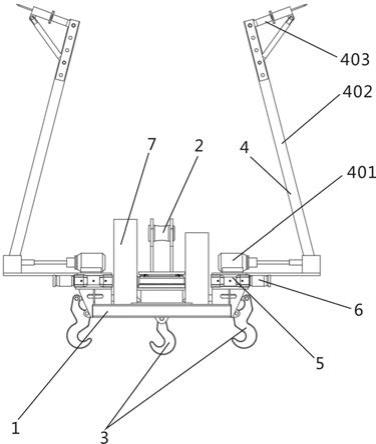
26.图1是本发明的立体结构示意图;
27.图2是本发明的俯视结构示意图;
28.图3是绕线机构的剖面结构示意图。
29.图中:1岸基箱;2储物盒;3光纤控制盒;4光纤包络管;5圆柱头螺栓ⅰ;6滑环外端定
位套筒;7轴用弹簧卡簧ⅰ;8立式轴承座;9左支座;10平圆头螺栓ⅰ;11左侧板;12左侧外轮轴;13圆柱头螺栓ⅱ;14圆柱头螺栓ⅲ;15开槽锥端紧定螺栓ⅰ;16滑环定子端;17滑环保护座;18滑环内端定位套筒;19圆柱头螺栓ⅳ;20滑环动子端;21绕线轴;22光纤;23圆柱头螺栓
ⅴ
;24圆柱头螺栓
ⅵ
;25右侧外轮轴;26右侧板;27右支座;28止动法兰;29蝶形螺栓ⅰ;30圆柱头螺栓
ⅶ
;31插拔手轮;32水密插头;33水密插头固定套;34支撑架;35前端辊棒;36圆柱头螺栓
ⅷ
;37圆柱头螺栓
ⅸ
。
具体实施方式
30.为了使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。
31.在以下描述中阐述了具体细节以便于充分理解本发明。但是本发明能够以多种不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似推广。因此本发明不受下面公开的具体实施方式的限制。
32.如图1至图3所示,本发明所述的用于水下机器人的绕线装置包括岸基箱1、储物盒2、光纤控制盒3和绕线机构,储物盒2、光纤控制盒3和绕线机构位于岸基箱1内,岸基箱1起到了装载和运输的作用。本实施例中,储物盒2通过胶粘的方式固定在岸基箱1内,光纤控制盒3通过圆柱头螺栓固定在岸基箱1内。光纤控制盒3通过光纤与绕线机构连接,光纤控制盒3内装有光纤交换机、电源等光纤信号传输物品,用于采集并传输绕线机构的工作信号,连接光纤控制盒3和绕线机构的光纤外侧设有光纤包络管4,光纤包络管4的两端分别通过圆柱头螺栓ⅰ5与光纤控制盒3和绕线机构固定连接。
33.绕线机构包括绕线轴21、滑环、左侧板11、左支座9、右侧板26、右支座27和插拔手轮31,绕线轴21呈空心状,绕线轴21的左端设有滑环、左侧板11和左支座9,绕线轴21的右端设有右侧板26、右支座27和插拔手轮31,绕线轴21的两端分别通过圆柱头螺栓
ⅴ
23与左侧板11、右侧板26固定连接,绕线轴21的两端外侧分别设有左支座9和右支座27,左支座9和右支座27分别通过平圆头螺栓ⅰ10与岸基箱1的底部固定连接,左支座9和右支座27内均设有立式轴承座8,立式轴承座8位于左支座9和右支座27的内孔中,立式轴承座8通过圆柱头螺栓
ⅷ
36与左支座9和右支座27固定连接。
34.滑环包括滑环定子端16和滑环动子端20,滑环定子端16位于滑环动子端20的外侧,滑环定子端16通过光纤与光纤控制箱3连接,滑环定子端16的内端面与滑环动子端20转动连接。滑环定子端16位于左支座9的立式轴承座8内,滑环定子端16的外侧设有滑环外端定位套筒6,滑环定子端16的内端设有滑环内端定位套筒18。滑环外端定位套筒6呈形,包括垂直固定连接的连接板和套筒,如图3所示,光纤包络管4、滑环外端定位套筒6的连接板依次通过圆柱头螺栓ⅰ5与立式轴承座8的外端面固定连接,滑环外端定位套筒6的套筒套在滑环定子端16的环形外侧。滑环内端定位套筒18套在滑环定子端16的环形外侧,滑环定子端16的内侧端面通过圆柱头螺栓ⅳ19与滑环内端定位套筒18固定连接。滑环外端定位套筒6与滑环内端定位套筒18之间通过开槽锥端紧定螺栓ⅰ15固定连接。
35.立式轴承座8和滑环外端定位套筒6之间设有左侧外轮轴12,左侧板11的中心设有通孔,左侧外轮轴12穿过该通孔。左侧外轮轴12的外端与立式轴承座8的内表面之间呈过渡配合,左侧外轮轴12的环形外表面设有轴肩,轴肩与立式轴承座8的内表面之间设有轴用弹
簧卡簧ⅰ7,轴肩和轴用弹簧卡簧ⅰ7共同作用,对左侧外轮轴12起到了轴向定位的作用。左侧外轮轴12的内端面与左侧板11的内侧端面之间通过圆柱头螺栓ⅱ13固定连接,同时左侧外轮轴12的内端面通过圆柱头螺栓ⅲ14与滑环保护座17固定连接。滑环保护座17位于滑环内端定位套筒18的外侧,滑环动子端20与滑环定子端16的连接端位于滑环保护座17内,滑环保护座17对滑环动子端20起到了保护作用。光纤22的一端与滑环动子端20连接,另一端穿过绕线轴21右侧的槽口缠绕在绕线轴21上。
36.本说明中,滑环定子端16与绕线轴21的左端固定连接,滑环定子端16和滑环动子端20转动连接。由于滑环动子端的前端固定有“一字型”导动杆,“一字型”导动杆设置在滑环保护座17的凹槽内,通过滑环保护座17约束“一字型”导动杆,使滑环动子端20与绕线轴21保持同步运动,防止滑环动子端20与光纤22之间之间产生转速不一致,导致光纤打结。
37.绕线轴21的右端还设有右侧外轮轴25,右侧外轮轴25穿过右侧板中心的通孔,右侧外轮轴25的内端面通过圆柱头螺栓
ⅵ
24与右侧板26的内侧端面固定连接。右侧外轮轴25位于右支座27的立式轴承座8内,右侧外轮轴25与立式轴承座8之间呈过渡配合。右侧外轮轴25的环形外表面设有轴肩,轴肩与立式轴承座8的内表面之间设有轴用弹簧卡簧ⅰ7,轴肩和轴用弹簧卡簧ⅰ7共同作用,对右侧外轮轴25起到了轴向定位的作用。右侧外轮轴25的外端套有插拔手轮31,本实施例中,插拔手轮31与右侧外轮轴25之间呈间隙配合,方便插拔手轮31的插入与拔出。立式轴承座8的外侧端面通过圆柱头螺栓
ⅶ
30与止动法兰28固定连接,止动法兰28套在右侧外轮轴25的外侧,止动法兰28内设有蝶形螺栓ⅰ29,止动法兰28设有内螺纹,蝶形螺栓ⅰ29与止动法兰28的内螺纹之间形成螺纹连接,旋转蝶形螺栓ⅰ29时,实现了蝶形螺栓ⅰ29的旋进或旋出,当蝶形螺栓ⅰ29旋进时,蝶形螺栓ⅰ29与右侧外轮轴25之间的接触量变大,使右侧外轮轴25转动过程中的摩擦力变大,从而改变右侧外轮轴25的转动速度,因此通过改变蝶形螺栓ⅰ29与右侧外轮轴25之间的接触量,控制右侧外轮轴25的转动速度,从而改变整个绕线轴21的转动速度,从而控制进出线的速度。
38.左支座9和右支座27分别通过圆柱头螺栓固定连接有支撑架34,支撑架34的另一端分别固定有前端棍棒35,前端棍棒35的端部分别设有水密插头32和水密插头固定套33,水密插头固定套33用于固定水密插头32,水密插头32与光纤22的自由端固定连接,一方面可以防止光纤22在岸基箱内松散,另一方面,带有光纤端部的水密插头32可以直接与水下机器人连接。
39.利用该装置实现放线和收线的工作过程如下所述:当水下机器人在测试和操作环节需要带缆操作时,打开岸基箱1,将水密插头32从水密插头固定套33上取下,连接至水下机器人,旋开止动法兰28上的蝶形螺栓ⅰ29,并通过蝶形螺栓ⅰ29控制右侧外轮轴25的转动速度,由于右侧外轮轴25与右侧板26固定连接,而右侧板26固定在绕线轴21的端部,因此右侧外轮轴25的转动速度与绕线轴21的转动速度相同,从而控制缠绕在绕线轴21上的光纤的放线速度,当光纤22的长度达到预期长度后,旋紧蝶形螺栓ⅰ29,绕线轴21停止转动,从而停止放线。
40.收线过程中,从储物盒2中取出插拔手轮31,将插拔手轮31插入至右侧外轮轴25的端部,旋开止动法兰上的蝶形螺栓ⅰ29,摇动插拔手轮31,即可将光纤重新缠绕在绕线轴21上,实现光纤的收回,当光纤全部收回后,再次旋紧止动法兰28,并将水密插头32取下并固定在水密插头固定套33内,插拔手轮31取下并放入储物盒2中。
41.以上对本发明所提供的水下机器人的绕线装置进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。