1.本技术涉及电子设备技术领域,尤其涉及到一种摄像头模组及电子设备。
背景技术:
2.为了提升手机的产品竞争力,集成高性能镜头已成为当前手机的重要发展趋势,手机镜头的拍摄焦段、解析度、成像质量等方面都需要有更进一步的提升,因此单个焦段的镜头以及数码变焦的方式已经不能满足消费者的需求。目前市场上发布的手机镜头高倍光变基本都是“跳跃式”变焦,即通过分别搭载多颗不同焦距的镜头,配合基于算法的数码变焦,实现混合光学变焦,这就导致手机的镜头数量越来越多,不仅会占用更多的机身空间,也会影响手机的外观品质。
技术实现要素:
3.本技术提供了一种摄像头模组及电子设备,用以在采用一颗镜头的基础上实现混合变倍的拍摄效果,此外还可以提高成像质量。
4.第一方面,本技术提供了一种摄像头模组,该摄像头模组可包括镜头、可变光圈和感光元件,其中,镜头可包括沿物侧到像侧排列的多片透镜;可变光圈可设置于其中一片透镜的物侧,可变光圈的通光孔径可调节为第一通光孔径和第二通光孔径,当可变光圈的通光孔径为第一通光孔径时,可将镜头的光圈数调整为f1,当可变光圈的通光孔径为第二通光孔径时,可将镜头的光圈数调整为f2,f1与f2满足:f1≥f2;感光元件设置于镜头的成像面,感光元件包括感光区。摄像头模组可包括两个成像模式,分别为第一成像模式和第二成像模式,在第一成像模式下,镜头的光圈数为f1,感光元件可用于使镜头在感光区的全区域成像,并调整感光区的全区域的角分辨率为δ;在第二成像模式下,镜头的光圈数为f2,感光元件可用于使所述镜头在所述感光区的部分区域成像,并调整感光区的部分区域的角分辨率为nδ,n为大于或等于1且小于或等于3的自然数。
5.上述方案中,摄像头模组在第一成像模式时可实现角分辨率为δ的感光区全像素成像,在第二成像模式时可实现角分辨率为2*δ或3*δ的感光区部分像素成像,并且在两个成像模式之间切换时镜头的有效焦距是不变的,即利用一颗镜头同时实现了全像素一倍成像和部分像素二倍或三倍成像,实现主摄镜头和二倍或三倍长焦镜头的二合一;并且,在第二成像模式下,通过改变可变光圈的通光孔径将镜头的f数由f1切换到f2,使得中心像素成像相比于普通的二倍或三倍镜头具有更大的光圈,更高的光学品质。
6.在一些可能的实施方案中,在100lp/mm时所述镜头在所述感光区的全区域成像的衍射极限为mtf1l,在100lp/mm时所述镜头在所述感光区的部分区域成像的衍射极限为mtf2l,mtf1l与mtf2l满足:1≤|mtf2l/mtf1l|≤3。
7.在一些可能的实施方案中,镜头所包含的透镜的数量n满足:5≤n≤9。
8.在一些可能的实施方案中,所述可变光圈的通光孔径为所述第一通光孔径时,所述镜头的光圈数f1满足:1.6≤f1≤4;所述可变光圈的通光孔径为所述第二通光孔径时,所
述镜头的光圈数f2满足:1.1≤f2≤1.6。
9.在一些可能的实施方案中,所述镜头在所述感光区的全区域成像时所述镜头的半像高为y1,所述镜头在所述感光区的部分区域成像时所述镜头的半像高为y2,y1与y2满足:1<|y1/y2|≤3。
10.在一些可能的实施方案中,所述镜头在所述感光区的全区域成像时所述感光元件输出的像元大小为p1,所述镜头在所述感光区的部分区域成像时所述感光元件输出的像元大小为p2;
11.当n=1时,p1与p2满足:p1/p2=1;
12.当n=2时,p1与p2满足:p1/p2=4;
13.当n=3时,p1与p2满足:p1/p2=9。
14.在一些可能的实施方案中,所述镜头在所述感光区的全区域成像时所述镜头的半像高y1与所述镜头的总长ttl满足:0.5≤|y1/ttl|≤1.5。
15.在一些可能的实施方案中,所述可变光圈与所述镜头的成像面之间的距离l与所述镜头的总长ttl满足:0.5≤|l/ttl|≤1.2,即可变光圈可以设置于最靠近被摄物的透镜的物侧,也可以设置于其它相邻的两片透镜之间。
16.在一些可能的实施方案中,所述镜头在所述感光区的部分区域以角分辨率为nδ成像时输出的图像的像素为8m~32m像素,可有效保证成像质量。
17.在一些可能的实施方案中,所述镜头在所述感光区的全区域成像时的入瞳直径为epd1,所述镜头在所述感光区的部分区域成像时的入瞳直径为epd2,epd1与epd2满足:0.25≤|epd1/epd2|≤1。
18.在一些可能的实施方案中,所述镜头的焦距efl与所述镜头的总长ttl满足:0.5≤|efl/ttl|≤1.2。
19.在一些可能的实施方案中,镜头可包括沿物侧到像侧排列的八片透镜,分别为第一透镜、第二透镜、第三透镜、第四透镜、第五透镜、第六透镜、第七透镜和第八透镜;其中,第二透镜具有负光焦度;第五透镜具有正光焦度,且第五透镜的焦距f5与镜头的焦距efl满足:0.5≤|f5/efl|≤1.2;第六透镜具有负光焦度,第六透镜的焦距f6与镜头的焦距efl满足:1≤|f6/efl|≤100;第八透镜的物侧表面近光轴处为凹面,像侧表面近光轴处为凹面。
20.在一些可能的实施方案中,八片透镜可分别为非球面透镜,从而可以消除像差,提高成像质量,此时,各个透镜均可采用树脂材质,以降低镜头的制作工艺难度以及制作成本。
21.当镜头包括八片透镜时,镜头的具体结构形式可以为如下几种:
22.第二透镜具有负光焦度,其焦距f2与镜头的焦距efl的比值:|f2/efl|=1.70;第五透镜具有正光焦度,其焦距f5与镜头的焦距efl的比值:|f5/efl|=1.01;第六透镜具有负光焦度,其焦距f6与镜头的焦距efl的比值:|f6/efl|=1.09;镜头的焦距efl与镜头的总长ttl的比值:|efl/ttl|=0.8307;可变光圈的通光孔径为第一通光孔径时,镜头的光圈数f1为2.074,可变光圈的通光孔径为第一通光孔径时,镜头的光圈数f2为1.4758;或
23.第二透镜具有负光焦度,其焦距f2与镜头的焦距efl的比值:|f2/efl|=1.71;第五透镜具有正光焦度,其焦距f5与镜头的焦距efl的比值:|f5/efl|=1.07;第六透镜具有负光焦度,其焦距f6与镜头的焦距efl的比值:|f6/efl|=1.14;镜头的焦距efl与镜头的总
长ttl的比值:|efl/ttl|=0.830;可变光圈的通光孔径为第一通光孔径时,镜头的光圈数f1为2.075,可变光圈的通光孔径为第一通光孔径时,镜头的光圈数f2为1.461;或
24.第二透镜具有负光焦度,其焦距f2与镜头的焦距efl的比值:|f2/efl|=2.452;第五透镜具有正光焦度,其焦距f5与镜头的焦距efl的比值:|f5/efl|=1.49;第六透镜具有负光焦度,其焦距f6与镜头的焦距efl的比值:|f6/efl|=4.052;镜头的焦距efl与镜头的总长ttl的比值:|efl/ttl|=0.7269;可变光圈的通光孔径为第一通光孔径时,镜头的光圈数f1为1.99,可变光圈的通光孔径为第一通光孔径时,镜头的光圈数f2为1.15;或
25.第二透镜具有负光焦度,其焦距f2与镜头的焦距efl的比值:|f2/efl|=1.99;第五透镜具有正光焦度,其焦距f5与镜头的焦距efl的比值:|f5/efl|=1.14;第六透镜具有负光焦度,其焦距f6与镜头的焦距efl的比值:|f6/efl|=1.22;镜头的焦距efl与镜头的总长ttl的比值:|efl/ttl|=0.802;可变光圈的通光孔径为第一通光孔径时,镜头的光圈数f1为1.65,可变光圈的通光孔径为第一通光孔径时,镜头的光圈数f2为1.58;或
26.第二透镜具有负光焦度,其焦距f2与镜头的焦距efl的比值:|f2/efl|=2.42;第五透镜具有正光焦度,其焦距f5与镜头的焦距efl的比值:|f5/efl|=1.49;第六透镜具有负光焦度,其焦距f6与镜头的焦距efl的比值:|f6/efl|=4.01;镜头的焦距efl与镜头的总长ttl的比值:|efl/ttl|=0.731;可变光圈的通光孔径为第一通光孔径时,镜头的光圈数f1为3.97,可变光圈的通光孔径为第一通光孔径时,镜头的光圈数f2为1.14。
27.在一些可能的实施方案中,镜头可包括沿物侧到像侧排列的九片透镜,分别为第一透镜、第二透镜、第三透镜、第四透镜、第五透镜、第六透镜、第七透镜、第八透镜和第九透镜,其中,第二透镜具有负光焦度,其焦距f2与镜头的焦距efl的比值:|f2/efl|=2.11;第五透镜具有正光焦度,其焦距f5与镜头的焦距efl的比值:|f5/efl|=1.37;第六透镜具有负光焦度,其焦距f6与镜头的焦距efl的比值:|f6/efl|=3.33;镜头的焦距efl与镜头的总长ttl的比值:|efl/ttl|=0.788;可变光圈的通光孔径为第一通光孔径时,镜头的光圈数f1为2.36,可变光圈的通光孔径为第一通光孔径时,镜头的光圈数f2为1.42。
28.在一些可能的实施方案中,镜头可包括沿物侧到像侧排列的六片透镜,分别为第一透镜、第二透镜、第三透镜、第四透镜、第五透镜和第六透镜,其中,第二透镜具有负光焦度,其焦距f2与镜头的焦距efl的比值:|f2/efl|=5.23;第三透镜具有负光焦度,其焦距f3与镜头的焦距efl的比值:|f3/efl|=2.87;第四透镜具有正光焦度,其焦距f4与镜头的焦距efl的比值:|f4/efl|=12.04;镜头的焦距efl与镜头的总长ttl的比值:|efl/ttl|=0.81;可变光圈的通光孔径为第一通光孔径时,镜头的光圈数f1为1.79,可变光圈的通光孔径为第一通光孔径时,镜头的光圈数f2为1.41。
29.在一些可能的实施方案中,镜头可包括沿物侧到像侧排列的五片透镜,分别为第一透镜、第二透镜、第三透镜、第四透镜和第五透镜,其中,第二透镜具有负光焦度,其焦距f2与镜头的焦距efl的比值:|f2/efl|=1.97;第三透镜具有正光焦度,其焦距f3与镜头的焦距efl的比值:|f5/efl|=3.41;第四透镜具有正光焦度,其焦距f4与镜头的焦距efl的比值:|f4/efl|=1.20;镜头的焦距efl与镜头的总长ttl的比值:|efl/ttl|=0.74;可变光圈的通光孔径为第一通光孔径时,镜头的光圈数f1为1.94,可变光圈的通光孔径为第一通光孔径时,镜头的光圈数f2为1.45。
30.在一些可能的实施方案中,镜头可包括沿物侧到像侧排列的七片透镜,分别为第
一透镜、第二透镜、第三透镜、第四透镜、第五透镜、第六透镜和第七透镜,其中,第二透镜具有负光焦度,其焦距f2与镜头的焦距efl的比值:|f2/efl|=2.51;第五透镜具有负光焦度,其焦距f5与镜头的焦距efl的比值:|f5/efl|=1.81;第六透镜具有负光焦度,其焦距f6与镜头的焦距efl的比值:|f6/efl|=2.31;镜头的焦距efl与镜头的总长ttl的比值:|efl/ttl|=0.814;可变光圈的通光孔径为第一通光孔径时,镜头的光圈数f1为2.31,可变光圈的通光孔径为第一通光孔径时,镜头的光圈数f2为1.59。
31.第二方面,本技术还提供了一种电子设备,该电子设备包括壳体以及前述任一可能的实施方案中的摄像头模组,摄像头模组具体可设置于壳体内。该电子设备的摄像头模组可利用一颗镜头同时实现了全像素一倍成像和中心像素二倍或三倍成像,从而可以其在电子设备内的占用空间,提高电子设备的外观品质。
附图说明
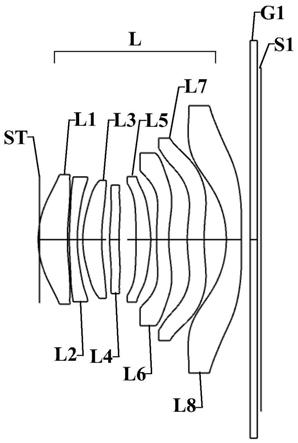
32.图1为本技术一实施例提供的摄像头模组的结构示意图;
33.图2a为图1中所示的摄像头模组处于第一成像模式时的结构示意图;
34.图2b为图1中所示的摄像头模组处于第二成像模式时的结构示意图;
35.图3a为第一种具体的摄像头模组处于第一成像模式时的结构示意图;
36.图3b为第一种具体的摄像头模组处于第二成像模式时的结构示意图;
37.图4a为图3a所示的摄像头模组的轴向色差曲线图;
38.图4b为图3b所示的摄像头模组的轴向色差曲线图;
39.图5a为图3a所示的摄像头模组的横向色差曲线图;
40.图5b为图3b所示的摄像头模组的横向色差曲线图;
41.图6a为图3a所示的摄像头模组的光学畸变曲线图;
42.图6b为图3b所示的摄像头模组的光学畸变曲线图;
43.图7a为第二种具体的摄像头模组处于第一成像模式时的结构示意图;
44.图7b为第二种具体的摄像头模组处于第二成像模式时的结构示意图;
45.图8a为图7a所示的摄像头模组的轴向色差曲线图;
46.图8b为图7b所示的摄像头模组的轴向色差曲线图;
47.图9a为图7a所示的摄像头模组的横向色差曲线图;
48.图9b为图7b所示的摄像头模组的横向色差曲线图;
49.图10a为图7a所示的摄像头模组的光学畸变曲线图;
50.图10b为图7b所示的摄像头模组的光学畸变曲线图;
51.图11a为第三种具体的摄像头模组处于第一成像模式时的结构示意图;
52.图11b为第三种具体的摄像头模组处于第二成像模式时的结构示意图;
53.图12a为图11a所示的摄像头模组的轴向色差曲线图;
54.图12b为图11b所示的摄像头模组的轴向色差曲线图;
55.图13a为图11a所示的摄像头模组的横向色差曲线图;
56.图13b为图11b所示的摄像头模组的横向色差曲线图;
57.图14a为图11a所示的摄像头模组的光学畸变曲线图;
58.图14b为图11b所示的摄像头模组的光学畸变曲线图;
59.图15a为第四种具体的摄像头模组处于第一成像模式时的结构示意图;
60.图15b为第四种具体的摄像头模组处于第二成像模式时的结构示意图;
61.图16a为图15a所示的摄像头模组的轴向色差曲线图;
62.图16b为图15b所示的摄像头模组的轴向色差曲线图;
63.图17a为图15a所示的摄像头模组的横向色差曲线图;
64.图17b为图15b所示的摄像头模组的横向色差曲线图;
65.图18a为图15a所示的摄像头模组的光学畸变曲线图;
66.图18b为图15b所示的摄像头模组的光学畸变曲线图;
67.图19a为第五种具体的摄像头模组处于第一成像模式时的结构示意图;
68.图19b为第五种具体的摄像头模组处于第二成像模式时的结构示意图;
69.图20a为图19a所示的摄像头模组的轴向色差曲线图;
70.图20b为图19b所示的摄像头模组的轴向色差曲线图;
71.图21a为图19a所示的摄像头模组的横向色差曲线图;
72.图21b为图19b所示的摄像头模组的横向色差曲线图;
73.图22a为图19a所示的摄像头模组的光学畸变曲线图;
74.图22b为图19b所示的摄像头模组的光学畸变曲线图;
75.图23a为第六种具体的摄像头模组处于第一成像模式时的结构示意图;
76.图23b为第六种具体的摄像头模组处于第二成像模式时的结构示意图;
77.图24a为图23a所示的摄像头模组的轴向色差曲线图;
78.图24b为图23b所示的摄像头模组的轴向色差曲线图;
79.图25a为图23a所示的摄像头模组的横向色差曲线图;
80.图25b为图23b所示的摄像头模组的横向色差曲线图;
81.图26a为图23a所示的摄像头模组的光学畸变曲线图;
82.图26b为图23b所示的摄像头模组的光学畸变曲线图;
83.图27a为第七种具体的摄像头模组处于第一成像模式时的结构示意图;
84.图27b为第七种具体的摄像头模组处于第二成像模式时的结构示意图;
85.图28a为图27a所示的摄像头模组的轴向色差曲线图;
86.图28b为图27b所示的摄像头模组的轴向色差曲线图;
87.图29a为图27a所示的摄像头模组的横向色差曲线图;
88.图29b为图27b所示的摄像头模组的横向色差曲线图;
89.图30a为图27a所示的摄像头模组的光学畸变曲线图;
90.图30b为图27b所示的摄像头模组的光学畸变曲线图;
91.图31a为第八种具体的摄像头模组处于第一成像模式时的结构示意图;
92.图31b为第八种具体的摄像头模组处于第二成像模式时的结构示意图;
93.图32a为图31a所示的摄像头模组的轴向色差曲线图;
94.图32b为图31b所示的摄像头模组的轴向色差曲线图;
95.图33a为图31a所示的摄像头模组的横向色差曲线图;
96.图33b为图31b所示的摄像头模组的横向色差曲线图;
97.图34a为图31a所示的摄像头模组的光学畸变曲线图;
98.图34b为图31b所示的摄像头模组的光学畸变曲线图;
99.图35a为第九种具体的摄像头模组处于第一成像模式时的结构示意图;
100.图35b为第九种具体的摄像头模组处于第二成像模式时的结构示意图;
101.图36a为图35a所示的摄像头模组的轴向色差曲线图;
102.图36b为图35b所示的摄像头模组的轴向色差曲线图;
103.图37a为图35a所示的摄像头模组的横向色差曲线图;
104.图37b为图35b所示的摄像头模组的横向色差曲线图;
105.图38a为图35a所示的摄像头模组的光学畸变曲线图;
106.图38b为图35b所示的摄像头模组的光学畸变曲线图;
107.图39为本技术实施例提供的电子设备的结构示意图。
具体实施方式
108.为方便理解本技术实施例提供的摄像头模组,首先对本技术中涉及到的相关英文简写以及名词概念进行简单说明:
109.f#f-number f数/光圈,是镜头的焦距/镜头的入瞳直径得出的相对值(相对孔径的倒数),光圈f值愈小,在同一单位时间内的进光量便愈多,光圈f值越大,景深愈小,拍照的背景内容将会虚化,类似长焦镜头的效果;
110.efl effect focal length镜头的有效焦距;
111.fov field of view视场角;
112.ttl total track length镜头的总长,具体指镜头最靠近被摄物的表面至成像面的距离;
113.bfl back focal length镜头的后焦长度,定义为镜头最靠近成像面的镜片至感光元件的距离;
114.mtf modulation transfer function调制传递函数;
115.epd entrance pupil diameter入瞳直径;
116.δ角分辨率,定义为光学系统能够分辨的最小角度的倒数,最小分辨角度的大小等于像元的边长大小除以镜头的焦距;
117.光焦度,等于像侧光束会聚度与物侧光束会聚度之差,正光焦度的透镜具有正的焦距、可使光线聚拢,负光焦度的透镜具有负的焦距、可使光线发散;
118.物侧可以理解为靠近被摄取物的一侧,像侧可以理解为靠近成像面的一侧;
119.透镜的物侧表面为透镜靠近被摄取物的一侧表面,透镜的像侧表面为透镜靠近成像面的一侧表面;
120.近光轴处可以理解为透镜表面靠近光轴的区域。
121.为了方便理解本技术实施例提供的摄像头模组,首先说明一下其应用场景。本技术实施例提供的摄像头模组可应用于电子设备中,用于使电子设备实现图像采集及视频采集等功能,其中,电子设备可以为现有技术中的手机、平板电脑或者笔记本电脑等常见终端。以手机为例,目前很多型号的手机常采用的变焦方式是通过搭载多颗不同焦距的镜头,配合基于算法的数码变焦,实现混合光学变焦,这种变焦方式虽然可以达到提高摄像头模组的变焦范围的目的,但另一方面也会由于镜头数量增多而导致摄像头模组的尺寸过大,
这样就会占用更多的机身空间,并且还会影响手机的外观品质。
122.基于此,本技术实施例提供了一种摄像头模组以及应用该摄像头模组的电子设备,该摄像头模组可在采用单颗镜头的基础上,实现主摄镜头和二倍或三倍长焦镜头的二合一,并且还可利用可变光圈使二倍或三倍成像时具有更大的光圈,提高成像质量。
123.参考图1所示,图1为本技术一实施例提供的摄像头模组的结构示意图。该摄像头模组可包括镜头l、可变光圈st、感光元件和滤光片g1,其中,镜头l可包括多片具有光焦度的透镜,这些透镜具体可沿物侧到像侧依次排列;可变光圈st设置于其中一片透镜的物侧,可通过改变其通光孔径来调整镜头l的光圈值,具体实施时,可变光圈st可位于最靠近被摄物的透镜的物侧,或者其它任意相邻的两片透镜之间,本技术对此不做具体限制,示例性地,可变光圈st与镜头l的成像面s1之间的距离l与镜头的总长ttl满足:0.5≤|l/ttl|≤1.2;滤光片g1设置于最靠近成像面s1的透镜的像侧,即该片透镜与成像面s1之间,可用于过滤光线中的红外光,以提高镜头l的有效分辨率和色彩还原性,使成像更加清晰、稳定;感光元件设置于镜头l的成像面s1,可用于对入射光线的光信号进行光电转换以及a/d(analog/digital,模拟信号/数字信号)转换,以将转换的电信号通过基板传输至电子设备的图形处理器或者中央处理器中,从而实现对光学影像的获取、转换和处理等功能。
124.继续参考图1,本技术实施例的镜头l所包含的透镜数量n满足:5≤n≤9,示例性地,n可以为5,6,7,8,9,这些透镜分别可以为非球面透镜,从而可以消除像差,提高成像质量,此时,各个透镜均可采用树脂材质,以降低镜头的制作工艺难度以及制作成本;当然,在本技术的其它实施例中,还可以使靠近被摄物的部分透镜采用玻璃材质,使靠近成像面的部分透镜采用树脂材质,本技术对此不作具体限制。图1中具体示出了采用八片式镜头的摄像头模组的结构。沿物侧到像侧,该镜头l依次包括第一透镜l1、第二透镜l2、第三透镜l3、第四透镜l4、第五透镜l5、第六透镜l6、第七透镜l7和第八透镜l8;其中,第二透镜l2具有负光焦度;第五透镜l5具有正光焦度,且第五透镜l5的焦距f5与镜头的焦距efl满足:0.5≤|f5/efl|≤1.2;第六透镜l6具有负光焦度,第六透镜l6的焦距f6与镜头的焦距efl满足:1≤|f6/efl|≤100;第八透镜l8的物侧表面近光轴处为凹面,像侧表面近光轴处为凹面。
125.此外,可变光圈st可采用现有技术中的可变光圈结构,其通光孔径的调节原理也可与现有技术中的相同,此处不过多赘述。在本技术实施例中,可变光圈st的通光孔径可被调节为第一通光孔径和第二通光孔径,当可变光圈st的通光孔径为第一通光孔径时,镜头l的f数可相应地调节为f1,当可变光圈st的通光孔径为第二通光孔径时,镜头l的f数可相应地调节为f2,其中,f1与f2之间满足:f1≥f2,示例性地,f1满足:1.6≤f1≤4;f2满足:1.1≤f2≤1.6。
126.本技术实施例提供的摄像头模组可包括两种成像模式,一并参考图2a和图2b所示,其中,图2a为该摄像头模组处于第一成像模式时的结构示意图,图2b为该摄像头模组处于第二成像模式时的结构示意图。当摄像头模组处于第一工作模式时,可通过调整可变光圈的通光孔径将镜头的f数调整为f1,感光元件用于使可使镜头l在其感光区的全区域进行成像,并将感光区的全区域的角分辨率调整为δ;当摄像头模组处于第二工作模式时,可通过调整可变光圈的通光孔径将镜头的f数调整为f2,感光元件用于使镜头l在其感光区的部分区域进行成像,并将感光区的全区域的角分辨率调整为nδ。需要说明的是,上述第一成像模式中,在感光区的全区域成像具体可理解为利用感光区内的全部像素进行成像,即全像
素成像,上述第二成像模式中,在感光区的部分区域成像则可理解为利用感光区内的部分区域的像素进行成像,该部分区域可以为感光区的中心区域或者其它任意区域,本技术对此不做具体限制,镜头l在感光区的部分区域成像时,相当于缩小了镜头的视场角,因此可实现类似长焦的拍摄效果。
127.上述实施例中,n可以取值为1,2或3,角分辨率的大小变化具体可通过控制感光元件输出的像元的大小来实现。例如,在第一成像模式下感光元件输出的像元大小为p1,在第二成像模式下感光元件输出的像元大小为p2,当p1与p2满足:p1/p2=1时,镜头可在两种成像模式下以相同的角分辨率进行成像,此时n=1;当p1与p2满足:p1/p2=4时,镜头可在第二成像模式下实现角分辨率为2*δ的成像;当p1与p2满足:p1/p2=9时,镜头可在第二成像模式下实现角分辨率为3*δ的成像。应当说明的是,该实施例中控制感光元件输出的像元的大小的具体方式与现有技术中的相同,此处不过多赘述。
128.在本技术一个具体的实施例中,摄像头模组在第二成像模式下可输出8m~32m像素的图像,可有效保证成像质量。
129.在采用上述结构时,摄像头模组处于第一成像模式时镜头的半像高为y1,摄像头模组处于第二成像模式时镜的半像高为y2,y1与y2满足:1<|y1/y2|≤3;摄像头模组处于第一成像模式时镜头的入瞳直径为epd1,摄像头模组处于第二成像模式时镜头的入瞳直径为epd2,epd1与epd2满足0.25≤|epd1/epd2|≤1。
130.此外,镜头的焦距efl与镜头的总长ttl可满足:0.5≤|efl/ttl|≤1.2;摄像头模组处于第一成像模式时镜头的半像高为y1与镜头的总长ttl可满足:0.5≤|y1/ttl|≤1.5。
131.通过以上描述可以看出,本技术实施例提供的摄像头模组在第一成像模式时可实现角分辨率为δ的感光区全像素成像,在第二成像模式时可实现角分辨率为2*δ或3*δ的感光区中心像素成像,并且在两个成像模式之间切换时镜头的有效焦距是不变的,即利用一颗镜头同时实现了全像素一倍成像和中心像素二倍或三倍成像,实现主摄镜头和二倍或三倍长焦镜头的二合一;并且,在第二成像模式下,通过改变可变光圈的通光孔径将镜头的f数由f1切换到f2,使得中心像素成像相比于普通的二倍或三倍镜头具有更大的光圈,更高的光学品质,在100lp/mm时中心像素成像的衍射极限mtf2l与全像素成像的衍射极限mtf1l之间可满足1≤|mtf2l/mtf1l|≤3。
132.为方便理解本技术实施例提供的变焦镜头的效果,下面结合具体的实施例对摄像头模组的成像效果进行详细的说明。
133.图3a和图3b示出了第一种具体的摄像头模组,其中,图3a为该摄像头模组处于第一成像模式时的结构示意图,图3b为该摄像头模组处于第二成像模式时的结构示意图。该摄像头模组的镜头包括八片具有光焦度的透镜,从物侧起依次为第一透镜l1、第二透镜l2、第三透镜l3、第四透镜l4、第五透镜l5、第六透镜l6、第七透镜l7和第八透镜l8,可变光圈st具体可位于第一透镜l1的物侧,滤光片g1则位于第八透镜l8的像侧。
134.本技术实施例中镜头的各透镜均可为非球面透镜,即镜头共包含16个非球面,一并参考表1a和表1b,其中,表1a为镜头中各透镜的曲率半径、厚度、折射率、阿贝系数,表1b为各透镜的非球面系数。
135.表1a
[0136][0137][0138]
表1b
[0139][0140]
表1b中所示的镜头的16个非球面中,所有扩展非球面面型z可利用但不限于以下非球面公式进行限定:
[0141][0142]
其中,z为非球面的矢高,r为非球面的归一化径向坐标,r等于非球面的实际径向坐标除以归一化半径r,c为非球面顶点球曲率,k为二次曲面常数,a2,a3,a4,a5,a6,a7,a8,a9,a10,a11,a12,a13为非球面系数。
[0143]
本技术实施例中,第二透镜l2具有负光焦度,其焦距f2与镜头的焦距efl的比值:|f2/efl|=1.70;第五透镜l5具有正光焦度,其焦距f5与镜头的焦距efl的比值:|f5/efl|=1.01;第六透镜l6具有负光焦度,其焦距f6与镜头的焦距efl的比值:|f6/efl|=1.09;镜头的焦距efl与镜头的总长ttl的比值:|efl/ttl|=0.8307。
[0144]
继续参考图3a所示,当摄像头模组处于第一成像模式时,镜头在感光区的全区域成像,镜头的半像高y1为5.8mm,入瞳直径epd1为3.0467mm,f数为2.074;参考图3b所示,当摄像头模组切换为第二成像模式时,镜头在感光区的部分区域成像,镜头的半像高y2为2.86mm,入瞳直径epd2为4.31mm,f数为1.4758;其中,epd1与epd2的比值:|epd1/epd2|=0.708,y1与y2的比值:|y1/y2|=2.028;此外,摄像头处于第一成像模式时镜头的半像高y1与镜头的总长ttl的比值:|y1/ttl|=0.77,入瞳直径epd1与镜头的总长ttl的比值:|epd1/ttl|=0.4056。镜头的各项基本参数具体请参考表2所示。
[0145]
表2
[0146][0147]
对图3a和图3b所示的摄像头模组进行仿真,下面结合附图详细说明其仿真结果。
[0148]
图4a为摄像头模组处于第一成像模式时的轴向色差曲线图,图中分别示出了650nm、610nm、555nm、510nm、470nm波长的颜色光聚焦深度位置的仿真结果,可以看出,镜头在第一成像模式下的轴向色差控制在一个很小的范围内;
[0149]
图4b为摄像头模组处于第二成像模式时的轴向色差曲线图,图中分别示出了650nm、610nm、555nm、510nm、470nm波长的颜色光聚焦深度位置的仿真结果,可以看出,镜头在第二成像模式下的轴向色差控制在一个很小的范围内;
[0150]
图5a为摄像头模组处于第一成像模式时的横向色差曲线图,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,虚线表示衍射极限范围-1.4um~1.4um之间,可以看出,五条光线的横向色差均在衍射极限内;
[0151]
图5b为摄像头模组处于第二成像模式时的横向色差曲线图,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,虚线表示衍射极限范围-1.0um~1.0um之间,可以看出,五条光线的横向色差均在衍射极限内;
[0152]
图6a为摄像头模组处于第一成像模式时的光学畸变曲线图,表示成像变形与理想形状的差异,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,可以看出在该模式下可将光学畸变控制在小于2%的范围内;
[0153]
图6b为摄像头模组处于第二成像模式时的光学畸变曲线图,表示成像变形与理想形状的差异,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,可以看出在该模式下可将光学畸变控制在小于2%的范围内。
[0154]
图7a和图7b示出了第二种具体的摄像头模组,其中,图7a为该摄像头模组处于第一成像模式时的结构示意图,图7b为该摄像头模组处于第二成像模式时的结构示意图。该摄像头模组的镜头包括八片具有光焦度的透镜,从物侧起依次为第一透镜l1、第二透镜l2、第三透镜l3、第四透镜l4、第五透镜l5、第六透镜l6、第七透镜l7和第八透镜l8,可变光圈st具体可位于第一透镜l1的物侧,滤光片g1则位于第八透镜l8的像侧。
[0155]
本技术实施例中镜头的各透镜均可为非球面透镜,即镜头共包含16个非球面,一并参考表3a和表3b,其中,表3a为镜头中各透镜的曲率半径、厚度、折射率、阿贝系数,表3b为各透镜的非球面系数。
[0156]
表3a
[0157][0158]
表3b
[0159][0160]
表3b中所示的镜头的16个非球面中,所有扩展非球面面型z可利用但不限于以下非球面公式进行限定:
[0161][0162]
其中,z为非球面的矢高,r为非球面的归一化径向坐标,r等于非球面的实际径向坐标除以归一化半径r,c为非球面顶点球曲率,k为二次曲面常数,a2,a3,a4,a5,a6,a7,a8,a9,a10,a11,a12,a13为非球面系数。
[0163]
本技术实施例中,第二透镜l2具有负光焦度,其焦距f2与镜头的焦距efl的比值:|f2/efl|=1.71;第五透镜l5具有正光焦度,其焦距f5与镜头的焦距efl的比值:|f5/efl|=1.07;第六透镜l6具有负光焦度,其焦距f6与镜头的焦距efl的比值:|f6/efl|=1.14;镜头的焦距efl与镜头的总长ttl的比值:|efl/ttl|=0.830。
[0164]
继续参考图7a所示,当摄像头模组处于第一成像模式时,镜头在感光区的全区域成像,镜头的半像高y1为5.8mm,入瞳直径epd1为3.037mm,f数为2.075;参考图7b所示,当摄像头模组切换为第二成像模式时,镜头在感光区的部分区域成像,镜头的半像高y2为2.86mm,入瞳直径epd2为4.29mm,f数为1.461;其中,epd1与epd2的比值:
[0165]
|epd1/epd2|=0.708,y1与y2的比值:|y1/y2|=2.028;此外,摄像头处于第一成像模式时镜头的半像高y1与镜头的总长ttl的比值:|y1/ttl|=0.77,入瞳直径epd1与镜头的总长ttl的比值:|epd1/ttl|=0.4053。镜头的各项基本参数具体请参考表4所示。
[0166]
表4
[0167][0168]
对图7a和图7b所示的摄像头模组进行仿真,下面结合附图详细说明其仿真结果。
[0169]
图8a为摄像头模组处于第一成像模式时的轴向色差曲线图,图中分别示出了650nm、610nm、555nm、510nm、470nm波长的颜色光聚焦深度位置的仿真结果,可以看出,镜头在第一成像模式下的轴向色差控制在一个很小的范围内;
[0170]
图8b为摄像头模组处于第二成像模式时的轴向色差曲线图,图中分别示出了650nm、610nm、555nm、510nm、470nm波长的颜色光聚焦深度位置的仿真结果,可以看出,镜头在第二成像模式下的轴向色差控制在一个很小的范围内;
[0171]
图9a为摄像头模组处于第一成像模式时的横向色差曲线图,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,虚线表示衍射极限范围-1.4um~1.4um之间,可以看出,五条光线的横向色差基本在衍射极限内;
[0172]
图9b为摄像头模组处于第二成像模式时的横向色差曲线图,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,虚线表示衍射极限范围-1.0um~1.0um之间,可以看出,五条光线的横向色差基本在衍射极限内;
[0173]
图10a为摄像头模组处于第一成像模式时的光学畸变曲线图,表示成像变形与理想形状的差异,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,可以看出在该模式下可将光学畸变控制在小于2%的范围内;
[0174]
图10b为摄像头模组处于第二成像模式时的光学畸变曲线图,表示成像变形与理想形状的差异,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,可以看出在该模式下可将光学畸变控制在小于2%的范围内。
[0175]
图11a和图11b示出了第三种具体的摄像头模组,其中,图11a为该摄像头模组处于第一成像模式时的结构示意图,图11b为该摄像头模组处于第二成像模式时的结构示意图。该摄像头模组的镜头包括八片具有光焦度的透镜,从物侧起依次为第一透镜l1、第二透镜l2、第三透镜l3、第四透镜l4、第五透镜l5、第六透镜l6、第七透镜l7和第八透镜l8,可变光圈具体st可位于第一透镜l1的物侧,滤光片g1则位于第八透镜l8的像侧。
[0176]
本技术实施例中镜头的各透镜均可为非球面透镜,即镜头共包含16个非球面,一并参考表5a和表5b,其中,表5a为镜头中各透镜的曲率半径、厚度、折射率、阿贝系数,表5b为各透镜的非球面系数。
[0177]
表5a
[0178][0179]
表5b
[0180]
[0181][0182]
表5b中所示的镜头的16个非球面中,所有扩展非球面面型z可利用但不限于以下非球面公式进行限定:
[0183][0184]
其中,z为非球面的矢高,r为非球面的归一化径向坐标,r等于非球面的实际径向坐标除以归一化半径r,c为非球面顶点球曲率,k为二次曲面常数,a2,a3,a4,a5,a6,a7,a8,a9,a10,a11,a12,a13为非球面系数。
[0185]
本技术实施例中,第二透镜l2具有负光焦度,其焦距f2与镜头的焦距efl的比值:|f2/efl|=2.452;第五透镜l5具有正光焦度,其焦距f5与镜头的焦距efl的比值:|f5/efl|=1.49;第六透镜l6具有负光焦度,其焦距f6与镜头的焦距efl的比值:|f6/efl|=4.052;镜头的焦距efl与镜头的总长ttl的比值:|efl/ttl|=0.7269。
[0186]
继续参考图11a所示,当摄像头模组处于第一成像模式时,镜头在感光区的全区域成像,镜头的半像高y1为5.8mm,入瞳直径epd1为2.8mm,f数为1.99;参考图11b所示,当摄像头模组切换为第二成像模式时,镜头在感光区的部分区域成像,镜头的半像高y2为3.00mm,入瞳直径epd2为4.84mm,f数为1.15;其中,epd1与epd2的比值:|epd1/epd2|=0.579,y1与y2的比值:|y1/y2|=1.933;此外,摄像头处于第一成像模式时镜头的半像高y1与镜头的总长ttl的比值:|y1/ttl|=0.757,入瞳直径epd1与镜头的总长ttl的比值:|epd1/ttl|=0.3656。镜头的各项基本参数具体请参考表6所示。
[0187]
表6
[0188][0189]
对图11a和图11b所示的摄像头模组进行仿真,下面结合附图详细说明其仿真结果。
[0190]
图12a为摄像头模组处于第一成像模式时的轴向色差曲线图,图中分别示出了650nm、610nm、555nm、510nm、470nm波长的颜色光聚焦深度位置的仿真结果,可以看出,镜头在第一成像模式下的轴向色差控制在一个很小的范围内;
[0191]
图12b为摄像头模组处于第二成像模式时的轴向色差曲线图,图中分别示出了650nm、610nm、555nm、510nm、470nm波长的颜色光聚焦深度位置的仿真结果,可以看出,镜头在第二成像模式下的轴向色差控制在一个很小的范围内;
[0192]
图13a为摄像头模组处于第一成像模式时的横向色差曲线图,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,虚线表示衍射极限范围-1.3um~1.3um之间,可以看出,五条光线的横向色差基本在衍射极限内;
[0193]
图13b为摄像头模组处于第二成像模式时的横向色差曲线图,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,虚线表示衍射极限范围-0.78um~0.78um之间,可以看出,五条光线的横向色差基本在衍射极限内;
[0194]
图14a为摄像头模组处于第一成像模式时的光学畸变曲线图,表示成像变形与理想形状的差异,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,可以看出在该模式下可将光学畸变控制在小于4%的范围内;
[0195]
图14b为摄像头模组处于第二成像模式时的光学畸变曲线图,表示成像变形与理想形状的差异,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,可以看出在该模式下可将光学畸变控制在小于4%的范围内。
[0196]
图15a和图15b示出了第四种具体的摄像头模组,其中,图15a为该摄像头模组处于第一成像模式时的结构示意图,图15b为该摄像头模组处于第二成像模式时的结构示意图。该摄像头模组的镜头包括八片具有光焦度的透镜,从物侧起依次为第一透镜l1、第二透镜l2、第三透镜l3、第四透镜l4、第五透镜l5、第六透镜l6、第七透镜l7和第八透镜l8,可变光圈st具体可位于第一透镜l1的物侧,滤光片g1则位于第八透镜l8的像侧。
[0197]
本技术实施例中镜头的各透镜均可为非球面透镜,即镜头共包含16个非球面,一并参考表7a和表7b,其中,表7a为镜头中各透镜的曲率半径、厚度、折射率、阿贝系数,表7b
为各透镜的非球面系数。
[0198]
表7a
[0199][0200]
表7b
[0201]
[0202][0203]
表7b中所示的镜头的16个非球面中,所有扩展非球面面型z可利用但不限于以下非球面公式进行限定:
[0204][0205]
其中,z为非球面的矢高,r为非球面的归一化径向坐标,r等于非球面的实际径向坐标除以归一化半径r,c为非球面顶点球曲率,k为二次曲面常数,a2,a3,a4,a5,a6,a7,a8,a9,a10,a11,a12,a13为非球面系数。
[0206]
本技术实施例中,第二透镜l2具有负光焦度,其焦距f2与镜头的焦距efl的比值:|f2/efl|=1.99;第五透镜l5具有正光焦度,其焦距f5与镜头的焦距efl的比值:|f5/efl|=1.14;第六透镜l6具有负光焦度,其焦距f6与镜头的焦距efl的比值:|f6/efl|=1.22;镜头的焦距efl与镜头的总长ttl的比值:|efl/ttl|=0.802。
[0207]
继续参考图15a所示,当摄像头模组处于第一成像模式时,镜头在感光区的全区域成像,镜头的半像高y1为5.4mm,入瞳直径epd1为3.62mm,f数为1.65;参考图15b所示,当摄像头模组切换为第二成像模式时,镜头在感光区的部分区域成像,镜头的半像高y2为5.3mm,入瞳直径epd2为3.774mm,f数为1.58;其中,epd1与epd2的比值:|epd1/epd2|=0.96,y1与y2的比值:|y1/y2|=1.02;此外,摄像头处于第一成像模式时镜头的半像高y1与镜头的总长ttl的比值:|y1/ttl|=0.724,入瞳直径epd1与镜头的总长ttl的比值:|epd1/ttl|=0.486。镜头的各项基本参数具体请参考表8所示。
[0208]
表8
[0209]
[0210][0211]
对图15a和图15b所示的摄像头模组进行仿真,下面结合附图详细说明其仿真结果。
[0212]
图16a为摄像头模组处于第一成像模式时的轴向色差曲线图,图中分别示出了650nm、610nm、555nm、510nm、470nm波长的颜色光聚焦深度位置的仿真结果,可以看出,镜头在第一成像模式下的轴向色差控制在一个很小的范围内;
[0213]
图16b为摄像头模组处于第二成像模式时的轴向色差曲线图,图中分别示出了650nm、610nm、555nm、510nm、470nm波长的颜色光聚焦深度位置的仿真结果,可以看出,镜头在第二成像模式下的轴向色差控制在一个很小的范围内;
[0214]
图17a为摄像头模组处于第一成像模式时的横向色差曲线图,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,虚线表示衍射极限范围-1.1um~1.1um之间,可以看出,五条光线的横向色差基本在衍射极限内;
[0215]
图17b为摄像头模组处于第二成像模式时的横向色差曲线图,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,虚线表示衍射极限范围-1.1um~1.1um之间,可以看出,五条光线的横向色差基本在衍射极限内;
[0216]
图18a为摄像头模组处于第一成像模式时的光学畸变曲线图,表示成像变形与理想形状的差异,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光可以看出在该模式下可将光学畸变控制在小于2%的范围内;
[0217]
图18b为摄像头模组处于第二成像模式时的光学畸变曲线图,表示成像变形与理想形状的差异,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,可以看出在该模式下可将光学畸变控制在小于2%的范围内。
[0218]
图19a和图19b示出了第五种具体的摄像头模组,其中,图19a为该摄像头模组处于第一成像模式时的结构示意图,图19b为该摄像头模组处于第二成像模式时的结构示意图。该摄像头模组的镜头包括八片具有光焦度的透镜,从物侧起依次为第一透镜l1、第二透镜l2、第三透镜l3、第四透镜l4、第五透镜l5、第六透镜l6、第七透镜l7和第八透镜l8,可变光圈st具体可位于第一透镜l1的物侧,滤光片g1则位于第八透镜l8的像侧。
[0219]
本技术实施例中镜头的各透镜均可为非球面透镜,即镜头共包含16个非球面,一并参考表9a和表9b,其中,表9a为镜头中各透镜的曲率半径、厚度、折射率、阿贝系数,表9b为各透镜的非球面系数。
[0220]
表9a
[0221][0222][0223]
表9b
[0224][0225][0226]
表9b中所示的镜头的16个非球面中,所有扩展非球面面型z可利用但不限于以下非球面公式进行限定:
[0227][0228]
其中,z为非球面的矢高,r为非球面的归一化径向坐标,r等于非球面的实际径向坐标除以归一化半径r,c为非球面顶点球曲率,k为二次曲面常数,a2,a3,a4,a5,a6,a7,a8,a9,a10,a11,a12,a13为非球面系数。
[0229]
本技术实施例中,第二透镜l2具有负光焦度,其焦距f2与镜头的焦距efl的比值:|f2/efl|=2.42;第五透镜l5具有正光焦度,其焦距f5与镜头的焦距efl的比值:|f5/efl|=1.49;第六透镜l6具有负光焦度,其焦距f6与镜头的焦距efl的比值:|f6/efl|=4.01;镜头的焦距efl与镜头的总长ttl的比值:|efl/ttl|=0.731。
[0230]
继续参考图18a所示,当摄像头模组处于第一成像模式时,镜头在感光区的全区域成像,镜头的半像高y1为5.8mm,入瞳直径epd1为1.4mm,f数为3.97;参考图18b所示,当摄像头模组切换为第二成像模式时,镜头在感光区的部分区域成像,镜头的半像高y2为1.95mm,入瞳直径epd2为4.84mm,f数为1.14;其中,epd1与epd2的比值:|epd1/epd2|=0.289,y1与y2的比值:|y1/y2|=2.97;此外,摄像头处于第一成像模式时镜头的半像高y1与镜头的总长ttl的比值:|y1/ttl|=0.762,入瞳直径epd1与镜头的总长ttl的比值:|epd1/ttl|=0.184。镜头的各项基本参数具体请参考表10所示。
[0231]
表10
[0232][0233]
对图19a和图19b所示的摄像头模组进行仿真,下面结合附图详细说明其仿真结果。
[0234]
图20a为摄像头模组处于第一成像模式时的轴向色差曲线图,图中分别示出了650nm、610nm、555nm、510nm、470nm波长的颜色光聚焦深度位置的仿真结果,可以看出,镜头在第一成像模式下的轴向色差控制在一个很小的范围内;
[0235]
图20b为摄像头模组处于第二成像模式时的轴向色差曲线图,图中分别示出了650nm、610nm、555nm、510nm、470nm波长的颜色光聚焦深度位置的仿真结果,可以看出,镜头在第二成像模式下的轴向色差控制在一个很小的范围内;
[0236]
图21a为摄像头模组处于第一成像模式时的横向色差曲线图,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,虚线表示衍射极限范围-2.7um~2.7um之间,可以看出,五条光线的横向色差基本在衍射极限内;
[0237]
图21b为摄像头模组处于第二成像模式时的横向色差曲线图,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,虚线表示衍射极限范围-0.78um~0.78um之间,可以看出,五条光线的横向色差基本在衍射极限内;
[0238]
图22a为摄像头模组处于第一成像模式时的光学畸变曲线图,表示成像变形与理想形状的差异,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,可以看出在该模式下可将光学畸变控制在小于3%的范围内;
[0239]
图22b为摄像头模组处于第二成像模式时的光学畸变曲线图,表示成像变形与理想形状的差异,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,可以看出在该模式下可将光学畸变控制在小于2%的范围内。
[0240]
图23a和图23b示出了第六种具体的摄像头模组,其中,图23a为该摄像头模组处于第一成像模式时的结构示意图,图23b为该摄像头模组处于第二成像模式时的结构示意图。该摄像头模组的镜头包括九片具有光焦度的透镜,从物侧起依次为第一透镜l1、第二透镜l2、第三透镜l3、第四透镜l4、第五透镜l5、第六透镜l6、第七透镜l7、第八透镜l8和第九透镜l9,可变光圈st具体可位于第一透镜l1的物侧,滤光片g1则位于第九透镜l9的像侧。
[0241]
本技术实施例中镜头的各透镜均可为非球面透镜,即镜头共包含18个非球面,一
并参考表11a和表11b,其中,表9a为镜头中各透镜的曲率半径、厚度、折射率、阿贝系数,表11b为各透镜的非球面系数。
[0242]
表11a
[0243][0244][0245]
表11b
[0246][0247][0248]
表11b中所示的镜头的18个非球面中,所有扩展非球面面型z可利用但不限于以下非球面公式进行限定:
[0249][0250]
其中,z为非球面的矢高,r为非球面的归一化径向坐标,r等于非球面的实际径向坐标除以归一化半径r,c为非球面顶点球曲率,k为二次曲面常数,a2,a3,a4,a5,a6,a7,a8,a9,a10,a11,a12,a13为非球面系数。
[0251]
本技术实施例中,第二透镜l2具有负光焦度,其焦距f2与镜头的焦距efl的比值:|f2/efl|=2.11;第五透镜l5具有正光焦度,其焦距f5与镜头的焦距efl的比值:|f5/efl|=1.37;第六透镜l6具有负光焦度,其焦距f6与镜头的焦距efl的比值:|f6/efl|=3.33;镜头的焦距efl与镜头的总长ttl的比值:|efl/ttl|=0.788。
[0252]
继续参考图23a所示,当摄像头模组处于第一成像模式时,镜头在感光区的全区域成像,镜头的半像高y1为5.1mm,入瞳直径epd1为3.0mm,f数为2.36;参考图23b所示,当摄像头模组切换为第二成像模式时,镜头在感光区的部分区域成像,镜头的半像高y2为2.5mm,入瞳直径epd2为5.0mm,f数为1.42;其中,epd1与epd2的比值:|epd1/epd2|=0.6,y1与y2的比值:|y1/y2|=2.04;此外,摄像头处于第一成像模式时镜头的半像高y1与镜头的总长ttl
的比值:|y1/ttl|=0.57,入瞳直径epd1与镜头的总长ttl的比值:|epd1/ttl|=0.33。镜头的各项基本参数具体请参考表12所示。
[0253]
表12
[0254][0255]
对图23a和图23b所示的摄像头模组进行仿真,下面结合附图详细说明其仿真结果。
[0256]
图24a为摄像头模组处于第一成像模式时的轴向色差曲线图,图中分别示出了650nm、610nm、555nm、510nm、470nm波长的颜色光聚焦深度位置的仿真结果,可以看出,镜头在第一成像模式下的轴向色差控制在一个很小的范围内;
[0257]
图24b为摄像头模组处于第二成像模式时的轴向色差曲线图,图中分别示出了650nm、610nm、555nm、510nm、470nm波长的颜色光聚焦深度位置的仿真结果,可以看出,镜头在第二成像模式下的轴向色差控制在一个很小的范围内;
[0258]
图25a为摄像头模组处于第一成像模式时的横向色差曲线图,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,虚线表示衍射极限范围-1.6um~1.6um之间,可以看出,五条光线的横向色差均在衍射极限内;
[0259]
图25b为摄像头模组处于第二成像模式时的横向色差曲线图,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,虚线表示衍射极限范围-0.95um~0.95um之间,可以看出,五条光线的横向色差均在衍射极限内;
[0260]
图26a为摄像头模组处于第一成像模式时的光学畸变曲线图,表示成像变形与理想形状的差异,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,可以看出在该模式下可将光学畸变控制在小于1%的范围内;
[0261]
图26b为摄像头模组处于第二成像模式时的光学畸变曲线图,表示成像变形与理想形状的差异,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,可以看出在该模式下可将光学畸变控制在小于1%的范围内。
[0262]
图27a和图27b示出了第七种具体的摄像头模组,其中,图27a为该摄像头模组处于第一成像模式时的结构示意图,图27b为该摄像头模组处于第二成像模式时的结构示意图。该摄像头模组的镜头包括六片具有光焦度的透镜,从物侧起依次为第一透镜l1、第二透镜l2、第三透镜l3、第四透镜l4、第五透镜l5和第六透镜l6,可变光圈st具体可位于第一透镜
l1的物侧,滤光片g1则位于第六透镜l6的像侧。
[0263]
本技术实施例中镜头的各透镜均可为非球面透镜,即镜头共包含12个非球面,一并参考表13a和表13b,其中,表13a为镜头中各透镜的曲率半径、厚度、折射率、阿贝系数,表13b为各透镜的非球面系数。
[0264]
表13a
[0265][0266][0267]
表13b
[0268][0269]
表13b中所示的镜头的12个非球面中,所有扩展非球面面型z可利用但不限于以下非球面公式进行限定:
[0270][0271]
其中,z为非球面的矢高,r为非球面的归一化径向坐标,r等于非球面的实际径向坐标除以归一化半径r,c为非球面顶点球曲率,k为二次曲面常数,a2,a3,a4,a5,a6,a7,a8,a9,a10为非球面系数。
[0272]
本技术实施例中,第二透镜l2具有负光焦度,其焦距f2与镜头的焦距efl的比值:|f2/efl|=5.23;第三透镜l3具有负光焦度,其焦距f3与镜头的焦距efl的比值:|f3/efl|=2.87;第四透镜l4具有正光焦度,其焦距f4与镜头的焦距efl的比值:|f4/efl|=12.04;镜头的焦距efl与镜头的总长ttl的比值:|efl/ttl|=0.81。
[0273]
继续参考图27a所示,当摄像头模组处于第一成像模式时,镜头在感光区的全区域成像,镜头的半像高y1为3.8mm,入瞳直径epd1为3.0mm,f数为1.79;参考图27b所示,当摄像头模组切换为第二成像模式时,镜头在感光区的部分区域成像,镜头的半像高y2为2.0mm,入瞳直径epd2为3.8mm,f数为1.41;其中,epd1与epd2的比值:|epd1/epd2|=0.789,y1与y2的比值:|y1/y2|=1.9;此外,摄像头处于第一成像模式时镜头的半像高y1与镜头的总长ttl的比值:|y1/ttl|=0.56,入瞳直径epd1与镜头的总长ttl的比值:|epd1/ttl|=0.445。镜头的各项基本参数具体请参考表12所示。
[0274]
表14
[0275][0276]
对图27a和图27b所示的摄像头模组进行仿真,下面结合附图详细说明其仿真结果。
[0277]
图28a为摄像头模组处于第一成像模式时的轴向色差曲线图,图中分别示出了650nm、610nm、555nm、510nm、470nm波长的颜色光聚焦深度位置的仿真结果,可以看出,镜头在第一成像模式下的轴向色差控制在一个很小的范围内;
[0278]
图28b为摄像头模组处于第二成像模式时的轴向色差曲线图,图中分别示出了650nm、610nm、555nm、510nm、470nm波长的颜色光聚焦深度位置的仿真结果,可以看出,镜头在第二成像模式下的轴向色差控制在一个很小的范围内;
[0279]
图29a为摄像头模组处于第一成像模式时的横向色差曲线图,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,虚线表示衍射极限范围-1.2um~1.2um之间,可以看出,五条光线的横向色差均在衍射极限内;
[0280]
图29b为摄像头模组处于第二成像模式时的横向色差曲线图,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,虚线表示衍射极限范围-0.95um~0.95um之间,可以看出,五条光线的横向色差基本在衍射极限内;
[0281]
图30a为摄像头模组处于第一成像模式时的光学畸变曲线图,表示成像变形与理想形状的差异,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,可以看出在该模式下可将光学畸变控制在小于1.2%的范围内;
[0282]
图30b为摄像头模组处于第二成像模式时的光学畸变曲线图,表示成像变形与理想形状的差异,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,可以看出在该模式下可将光学畸变控制在小于1.2%的范围内。
[0283]
图31a和图31b示出了第八种具体的摄像头模组,其中,图31a为该摄像头模组处于第一成像模式时的结构示意图,图31b为该摄像头模组处于第二成像模式时的结构示意图。该摄像头模组的镜头包括五片具有光焦度的透镜,从物侧起依次为第一透镜l1、第二透镜l2、第三透镜l3、第四透镜l4和第五透镜l5,可变光圈st具体可位于第一透镜l1与第二透镜l2之间,滤光片g1则位于第六透镜l6的像侧。
[0284]
本技术实施例中镜头的各透镜均可为非球面透镜,即镜头共包含10个非球面,一并参考表15a和表15b,其中,表15a为镜头中各透镜的曲率半径、厚度、折射率、阿贝系数,表
15b为各透镜的非球面系数。
[0285]
表15a
[0286][0287]
表15b
[0288][0289][0290]
表15b中所示的镜头的10个非球面中,所有扩展非球面面型z可利用但不限于以下非球面公式进行限定:
[0291][0292]
其中,z为非球面的矢高,r为非球面的归一化径向坐标,r等于非球面的实际径向坐标除以归一化半径r,c为非球面顶点球曲率,k为二次曲面常数,a2,a3,a4,a5,a6,a7,a8,
a9,a10,a11,a12,a13为非球面系数。
[0293]
本技术实施例中,第二透镜l2具有负光焦度,其焦距f2与镜头的焦距efl的比值:|f2/efl|=1.97;第三透镜l3具有正光焦度,其焦距f3与镜头的焦距efl的比值:|f5/efl|=3.41;第四透镜l4具有正光焦度,其焦距f4与镜头的焦距efl的比值:|f4/efl|=1.20;镜头的焦距efl与镜头的总长ttl的比值:|efl/ttl|=0.74。
[0294]
继续参考图31a所示,当摄像头模组处于第一成像模式时,镜头在感光区的全区域成像,镜头的半像高y1为5.0mm,入瞳直径epd1为3.27mm,f数为1.94;参考图31b所示,当摄像头模组切换为第二成像模式时,镜头在感光区的部分区域成像,镜头的半像高y2为2.5mm,入瞳直径epd2为4.36mm,f数为1.45;其中,epd1与epd2的比值:|epd1/epd2|=0.75,y1与y2的比值:|y1/y2|=2;此外,摄像头处于第一成像模式时镜头的半像高y1与镜头的总长ttl的比值:|y1/ttl|=0.59,入瞳直径epd1与镜头的总长ttl的比值:|epd1/ttl|=0.39。镜头的各项基本参数具体请参考表16所示。
[0295]
表16
[0296][0297]
对图31a和图31b所示的摄像头模组进行仿真,下面结合附图详细说明其仿真结果。
[0298]
图32a为摄像头模组处于第一成像模式时的轴向色差曲线图,图中分别示出了650nm、610nm、555nm、510nm、470nm波长的颜色光聚焦深度位置的仿真结果,可以看出,镜头在第一成像模式下的轴向色差控制在一个很小的范围内;
[0299]
图32b为摄像头模组处于第二成像模式时的轴向色差曲线图,图中分别示出了650nm、610nm、555nm、510nm、470nm波长的颜色光聚焦深度位置的仿真结果,可以看出,镜头在第二成像模式下的轴向色差控制在一个很小的范围内;
[0300]
图33a为摄像头模组处于第一成像模式时的横向色差曲线图,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,虚线表示衍射极限范围-1.3um~1.3um之间,可以看出,五条光线的横向色差均在衍射极限内;
[0301]
图33b为摄像头模组处于第二成像模式时的横向色差曲线图,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,虚线表示衍射极限范围-0.98um~0.98um之间,可以看出,五条光线的横向色差均在衍射极限内;
[0302]
图34a为摄像头模组处于第一成像模式时的光学畸变曲线图,表示成像变形与理想形状的差异,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,可以看出在该模式下可将光学畸变控制在小于2.5%的范围内;
[0303]
图34b为摄像头模组处于第二成像模式时的光学畸变曲线图,表示成像变形与理想形状的差异,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,可以看出在该模式下可将光学畸变控制在小于2.5%的范围内。
[0304]
图35a和图35b示出了第九种具体的摄像头模组,其中,图35a为该摄像头模组处于第一成像模式时的结构示意图,图35b为该摄像头模组处于第二成像模式时的结构示意图。该摄像头模组的镜头包括七片具有光焦度的透镜,从物侧起依次为第一透镜l1、第二透镜l2、第三透镜l3、第四透镜l4、第五透镜l5、第六透镜l6和第七透镜l7,可变光圈st具体可位于第一透镜l1的物侧,滤光片g1则位于第七透镜l7的像侧。
[0305]
本技术实施例中镜头的各透镜均可为非球面透镜,即镜头共包含14个非球面,一并参考表17a和表17b,其中,表17a为镜头中各透镜的曲率半径、厚度、折射率、阿贝系数,表17b为各透镜的非球面系数。
[0306]
表17a
[0307][0308][0309]
表17b
[0310][0311]
表17b中所示的镜头的14个非球面中,所有扩展非球面面型z可利用但不限于以下非球面公式进行限定:
[0312][0313]
其中,z为非球面的矢高,r为非球面的归一化径向坐标,r等于非球面的实际径向坐标除以归一化半径r,c为非球面顶点球曲率,k为二次曲面常数,a2,a3,a4,a5,a6,a7,a8,a9,a10,a11,a12,a13为非球面系数。
[0314]
本技术实施例中,第二透镜l2具有负光焦度,其焦距f2与镜头的焦距efl的比值:|f2/efl|=2.51;第五透镜l5具有负光焦度,其焦距f5与镜头的焦距efl的比值:|f5/efl|=1.81;第六透镜l6具有负光焦度,其焦距f6与镜头的焦距efl的比值:|f6/efl|=2.31;镜头的焦距efl与镜头的总长ttl的比值:|efl/ttl|=0.814。
[0315]
继续参考图35a所示,当摄像头模组处于第一成像模式时,镜头在感光区的全区域成像,镜头的半像高y1为5.8mm,入瞳直径epd1为3.0mm,f数为2.31;参考图35b所示,当摄像头模组切换为第二成像模式时,镜头在感光区的部分区域成像,镜头的半像高y2为2.9mm,入瞳直径epd2为4.35mm,f数为1.59;其中,epd1与epd2的比值:|epd1/epd2|=0.69,y1与y2的比值:|y1/y2|=2.0;此外,摄像头处于第一成像模式时镜头的半像高y1与镜头的总长ttl的比值:|y1/ttl|=0.682,入瞳直径epd1与镜头的总长ttl的比值:|epd1/ttl|=0.353。镜头的各项基本参数具体请参考表18所示。
[0316]
表18
[0317][0318]
对图35a和图35b所示的摄像头模组进行仿真,下面结合附图详细说明其仿真结果。
[0319]
图36a为摄像头模组处于第一成像模式时的轴向色差曲线图,图中分别示出了650nm、610nm、555nm、510nm、470nm波长的颜色光聚焦深度位置的仿真结果,可以看出,镜头在第一成像模式下的轴向色差控制在一个很小的范围内;
[0320]
图36b为摄像头模组处于第二成像模式时的轴向色差曲线图,图中分别示出了650nm、610nm、555nm、510nm、470nm波长的颜色光聚焦深度位置的仿真结果,可以看出,镜头在第二成像模式下的轴向色差控制在一个很小的范围内;
[0321]
图37a为摄像头模组处于第一成像模式时的横向色差曲线图,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,虚线表示衍射极限范围-1.55um~1.55um之间,可以看出,五条光线的横向色差基本在衍射极限内;
[0322]
图37b为摄像头模组处于第二成像模式时的横向色差曲线图,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,虚线表示衍射极限范围-1.1um~1.1um之间,可以看出,五条光线的横向色差均在衍射极限内;
[0323]
图38a为摄像头模组处于第一成像模式时的光学畸变曲线图,表示成像变形与理想形状的差异,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,可以看出在该模式下可将光学畸变控制在小于2%的范围内;
[0324]
图38b为摄像头模组处于第二成像模式时的光学畸变曲线图,表示成像变形与理想形状的差异,图中的五条实线曲线分别为650nm、610nm、555nm、510nm、470nm波长的颜色光,可以看出在该模式下可将光学畸变控制在小于2%的范围内。
[0325]
由上述第一种具体的变焦镜头、第二种具体的变焦镜头、第三种具体的变焦镜头、第四种具体的变焦镜头、第五种具体的变焦镜头、第六种具体的变焦镜头、第七种具体的变焦镜头、第八种具体的变焦镜头及第九种具体的变焦镜头的结构及仿真效果可以看出,本技术实施例提供的摄像头模组在两种不同的成像模式下均可获得较好的成像效果。
[0326]
参考图39所示,本技术实施例还提供了一种电子设备100,该电子设备100可以为现有技术中的手机、平板电脑或者笔记本电脑等常见终端。电子设备100包括壳体110以及前述任一实施例中的摄像头模组120,摄像头模组120可设置于壳体110内。该电子设备100
的摄像头模组120可利用一颗镜头同时实现了全像素一倍成像和中心像素二倍或三倍成像,从而可以减小其在电子设备100内的占用空间,提高电子设备100的外观品质。
[0327]
以上,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。