1.本发明涉及一种钢箱梁悬挂运输装置,具体涉及一种自动连续行走悬挂系统及顶推方法,属于交通工程技术领域。
背景技术:
2.目前对大跨径钢箱梁节段拼装均采用桥面吊机悬臂吊装,通常情况是将钢箱梁节段运输至待安装位置,利用桥面吊机起吊安装,对于不具备将节段运输至待安装位置时,通常采用在箱梁上设置u型吊架,将节段从墩柱位置通过梁下运梁,运至待安装位置后在用桥梁吊机进行转换安装,该工艺对于宽度较宽、重量较重的钢箱梁节段来说,需要一个大型的u型吊架,且刚度要求高,经济性较差。
技术实现要素:
3.本发明目的是提供了一种自动连续行走悬挂系统及顶推方法,能够实现钢箱梁等构件自动连续平稳推进。
4.本发明为实现上述目的,通过以下技术方案实现:一种自动连续行走悬挂系统,包括轨道装置、行走架装置和推进装置,行走架装置包括行走架及安装在行走架上的两个行走轮组,行走轮组与轨道装置配合能沿其行走;推进装置包含液压控制系统和两组推进单元,每组推进单元均包括推进油缸和止推件,推进油缸分布固定于行走架两端内部,并与对应的止推件连接,液压控制系统与其中一个止推件连接。
5.所述自动连续行走悬挂系统优选方案,止推件包括壳体,壳体内部具有止推腔,壳体上部设有上滑动部,止推腔上设有两组移动组件和支撑块,壳体下部设有支撑体,壳体底部设有下滑动部,上滑动部和下滑动部均具有与轨道配合的槽体,两组移动组件对称设置在壳体左右两侧,移动组件包括t形块和压缩块,两个压缩块之间设有压缩弹簧,压缩块与支撑块相互配合。
6.所述自动连续行走悬挂系统优选方案,压缩块与支撑块之间采用锥形配合。
7.所述自动连续行走悬挂系统优选方案,轨道装置包括轨道梁和轨道锚固座,轨道梁由钢板焊接形成箱型结构,通过轨道锚固座与钢箱梁可拆卸连接为一体。
8.所述自动连续行走悬挂系统优选方案,行走轮组包括轮架和四个行走轮总成,行走轮总成包括轮轴、行走轮和定位轴承,轮轴设在轮架上,轮轴一端设置行走轮,另一端设置两个定位轴承,轮架为三角形结构,底部设有与行走架连接的连接部。
9.所述自动连续行走悬挂系统优选方案,行走架由钢板焊接形成箱型结构,且具有安装行走轮组的空腔。
10.一种利用自动连续行走悬挂系统进行顶推方法,包括以下步骤:s1、在已安装的钢箱梁底部安装轨道装置,并依次安装行走架装置及推进装置,同
时启动止推件制动;s2、关闭靠近液压控制系统的止推件制动,启动推进油缸,推动行走悬挂装置前行;s3、油缸一个行程后,关闭远离液压控制系统的制动,启动靠近液压控制系统的制动,推进油缸处于回顶状态,继续拉动行走悬挂装置前行;s4、重复上述步骤,直至行走到位。
11.本发明的优点在于:1.将行走轨道固定于钢箱梁腹板底部,通过前后两个推进油缸相互交叉配合驱动悬挂装置自动连续前进,直至待安装位置。该动力驱动装置也可以加装于钢箱梁等构件顶推施工,实现钢箱梁等构件自动连续平稳推进, 工作效率高。
12.2. 动力装置可加装于钢箱梁等构件顶推施工,推广应用范围广阔,经济效益好。
13.3、相比同类型悬挂系统推进技术,具有结构简单,操作方便等特点。
附图说明
14.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
15.图1为本发明实施例的主视示意图。
16.图2为本发明实施例的俯视示意图。
17.图3为本发明实施例的侧视示意图。
18.图4为本发明实施例的止推件结构示意图。
19.图5为本发明实施例的行走轮组俯视示意图。
20.图6为本发明实施例的行走轮组主视示意图。
21.图7为本发明实施例的行走架装置主视示意图。
22.图8为本发明实施例的行走架装置侧视示意图。
23.图9为本发明实施例的行走架装置俯视示意图。
24.图10为本发明实施例的行走架主视示意图。
25.图11为本发明实施例的行走架侧视示意图。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
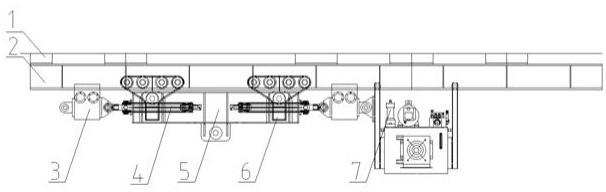
27.参考图1、图2及图3,一种自动连续行走悬挂系统,包括轨道装置、行走架装置和推进装置,轨道装置包括轨道梁2及与轨道梁2通过螺栓8连接为一体的轨道锚固座1,轨道梁2由钢板焊接形成箱型结构,通过轨道锚固座1与钢箱梁可拆卸连接为一体;行走架装置包括行走架5及安装在行走架上的两个行走轮组6,行走轮组6与轨道梁2配合能沿其行走;
推进装置包含液压控制系统和两组推进单元,每组推进单元均包括推进油缸4和止推件3,推进油缸4分布固定于行走架5两端内部,并与对应的止推件3连接,液压控制系统7与其中一个止推件3连接。
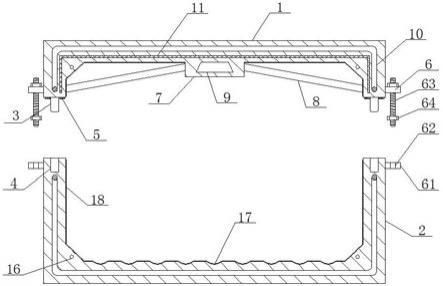
28.参考图4,止推件包括壳体,壳体内部具有止推腔,壳体上部设有上滑动部31,止推腔上设有两组移动组件和支撑块35,壳体下部设有支撑体36,壳体底部设有下滑动部37,上滑动部31和下滑动部37均具有与轨道配合的槽体,两组移动组件对称设置在壳体左右两侧,移动组件包括t形块34和压缩块33,两个压缩块33之间设有压缩弹簧32,压缩块33与支撑块35相互配合。
29.本实施例中,压缩块33与支撑块35之间采用锥形配合。
30.参考图5、图6、图7、图8及图9,行走轮组包括轮架62和四个行走轮总成,行走轮总成包括轮轴61、行走轮63和定位轴承64,轮轴61设在轮架62上,轮轴61一端设置行走轮63,另一端设置两个定位轴承64,轮架62为三角形结构,底部设有与行走架连接的连接部65。
31.参考图10及图11,行走架由钢板焊接形成箱型结构,且具有安装行走轮组的空腔51。
32.一种利用所述自动连续行走悬挂系统进行顶推方法,包括以下步骤:s1、在已安装的钢箱梁底部安装轨道装置,并依次安装行走架装置及推进装置,同时启动止推件制动;s2、关闭靠近液压控制系统的止推件制动,启动推进油缸,推动行走悬挂装置前行;s3、油缸一个行程后,关闭远离液压控制系统的制动,启动靠近液压控制系统的制动,推进油缸处于回顶状态,继续拉动行走悬挂装置前行;s4、重复上述步骤,直至行走到位。
33.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种自动连续行走悬挂系统,其特征在于:包括轨道装置、行走架装置和推进装置,行走架装置包括行走架及安装在行走架上的两个行走轮组,行走轮组与轨道装置配合能沿其行走;推进装置包含液压控制系统和两组推进单元,每组推进单元均包括推进油缸和止推件,推进油缸分布固定于行走架两端内部,并与对应的止推件连接,液压控制系统与其中一个止推件连接。2.根据权利要求1所述自动连续行走悬挂系统,其特征在于:止推件包括壳体,壳体内部具有止推腔,壳体上部设有上滑动部,止推腔上设有两组移动组件和支撑块(35),壳体下部设有支撑体,壳体底部设有下滑动部,上滑动部(31)和下滑动部均具有与轨道配合的槽体,两组移动组件对称设置在壳体左右两侧,移动组件包括t形块(34)和压缩块(33),两个压缩块(33)之间设有压缩弹簧(32),压缩块(33)与支撑块(35)相互配合。3.根据权利要求2所述自动连续行走悬挂系统,其特征在于:压缩块(33)与支撑块(35)之间采用锥形配合。4.根据权利要求1所述自动连续行走悬挂系统,其特征在于:轨道装置包括轨道梁和轨道锚固座,轨道梁由钢板焊接形成箱型结构,通过轨道锚固座与钢箱梁可拆卸连接为一体。5.根据权利要求1所述自动连续行走悬挂系统,其特征在于:行走轮组包括轮架(62)和四个行走轮总成,行走轮总成包括轮轴(61)、行走轮(63)和定位轴承(64),轮轴(61)设在轮架(62)上,轮轴(61)一端设置行走轮(63),另一端设置两个定位轴承(64),轮架(62)为三角形结构,底部设有与行走架连接的连接部(65)。6.根据权利要求1所述自动连续行走悬挂系统,其特征在于:行走架由钢板焊接形成箱型结构,且具有安装行走轮组的空腔(51)。7.一种利用权利要求1至6任意所述自动连续行走悬挂系统进行顶推方法,其特征在于:包括以下步骤:s1、在已安装的钢箱梁底部安装轨道装置,并依次安装行走架装置及推进装置,同时启动止推件制动;s2、关闭靠近液压控制系统的止推件制动,启动推进油缸,推动行走悬挂装置前行;s3、油缸一个行程后,关闭远离液压控制系统的制动,启动靠近液压控制系统的制动,推进油缸处于回顶状态,继续拉动行走悬挂装置前行;s4、重复上述步骤,直至行走到位。
技术总结
本发明提供了一种自动连续行走悬挂系统及顶推方法,能够实现钢箱梁等构件自动连续平稳推进。自动连续行走悬挂系统包括轨道装置、行走架装置和推进装置,推进装置包含液压控制系统和两组推进单元,每组推进单元均包括推进油缸和止推件,推进油缸分布固定于行走架两端内部,并与对应的止推件连接,液压控制系统与其中一个止推件连接。利用所述自动连续行走悬挂系统进行顶推方法,包括以下步骤:启动止推件制动;关闭靠近液压控制系统的止推件制动,启动推进油缸,推动行走悬挂装置前行;油缸一个行程后,关闭远离液压控制系统的制动,启动靠近液压控制系统的制动,推进油缸处于回顶状态,继续拉动行走悬挂装置前行。继续拉动行走悬挂装置前行。继续拉动行走悬挂装置前行。
技术研发人员:张光桥 冉海英 邢浩 王发军 李莹炜 赵秋红 王培光 万雨帆 赵连旨 张进海 邢希瑞 杨旭
受保护的技术使用者:山东省路桥集团有限公司
技术研发日:2021.07.22
技术公布日:2021/10/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。