本发明涉及根据独立权利要求前序部分的用于产生粗糙化表面的设备和方法。
本发明在独立权利要求1和12中定义。从属权利要求和以下描述给出了进一步的发展。
背景技术
从US2018/0126488A1、DE102016103578A1、DE102017200080A1已知激光处理模块。DE102009024957B3描述了一种用于激光沉积焊接的设备。DE102016103578A1描述了用于激光粗糙化的机器概念。
粗糙化表面通常在粗糙化后进行热涂覆。这种粗糙化用于例如改进施加到粗糙化表面上的金属或非金属(喷涂)层的粘合拉伸强度。这方面的一个示例是在内燃机缸膛中的应用。热喷涂涂层具有低摩擦和耐磨性能,能够优化内燃机,特别是在减少废气排放方面。在粗糙化和热涂覆之后,通常进行珩磨操作,该操作有时分多个步骤进行,并且可以将注射模制的表面改变成摩擦学上合适的形貌。
技术实现要素:
本发明的第一方面涉及激光处理设备的进一步发展,激光处理设备特别地用于激光粗糙化,该激光处理被导向至彼此间隔一定距离的多个工件开口的表面,工件开口的表面特别地可以是缸膛的表面。这种设备包括至少一个工作站。工作站可以设计为使其包括工件保持器。工件保持器可以布置在工作站中,或者可以布置成在工作站中进行处理。“可以布置”在这种情况下意味着它可以例如通过转台移动到工作站中,其中待加工的工件可以布置在转台上或布置在转台上的工件保持器中。在实际处理过程中,工件保持器在任何情况下都在工作站中。可以想到其他类型的转移装置,其可以具有工件保持器或者可以将工件保持器移动到工作站中。下面将参照本发明的第二方面讨论转移装置。结合本发明第二方面解释的个别、多个或所有特征也将被视为本发明第一方面的可能的进一步发展。转台(形成转移装置)可以设计为没有升降功能的常规转盘或转台,但也可以设计为升降转盘。在本发明的意义上,转台指的是可以通过围绕旋转轴线或转盘轴线的旋转运动来实施工件输送的转盘。工件通常在圆形路径上输送,尽管也可以叠加额外的平移运动,从而在通过转台输送的过程中可能导致工件运动偏离理想的圆形路径。本发明意义上的转台可以设计成类似于工作台,例如具有(例如圆形)平坦的支撑表面,但是它也可以是具有预期工件位置的不同(例如十字形)结构(例如工件保持器,例如具有分度机构,该分度机构可以是分度销)。
刚刚描述的工作站还包括激光处理模块。该激光处理模块具有模块轴线。在这种情况下,模块轴线是指激光处理模块的轴线。典型地,激光处理模块被设计成沿着模块轴线的细长方向。
工作站还具有定位装置。定位装置被设计并布置成在工作站中布置的进行处理的工件与激光处理模块之间产生相对运动。例如,定位装置可以移动激光处理模块。这种定位装置可以例如经由滑动件或复合滑动布置来实施。也可以想到,定位装置改变工件的位置。例如,定位装置可以通过上面已经提到的升降转盘的升降功能来实施。也可以设想在工作站中以平移方式移动的工件保持器。定位装置还可以具有用于移动激光处理模块和工件的机构或者保持工件的工件保持器。工件与激光处理模块之间的相对运动可以相应地通过移动两个部件来实施。沿着水平和/或竖直延伸的运动轴线的平移相对运动优选地是可能的。
激光处理模块具有光束引导光学器件。光束引导光学器件被设计成在排出方向上将用于表面处理的激光束引导到待处理的表面上。排出方向是指激光束离开激光处理模块的方向。排出方向被布置成相对于模块轴线和正交于模块轴线的平面倾斜。激光处理模块也被设计并布置成使激光束围绕模块轴线旋转。这意味着激光束在排出方向上围绕模块轴线旋转。因此,排出方向包括圆锥或截头圆锥的侧向表面中激光束的所有排出方向,圆锥或截头圆锥具有对应于排出方向的倾斜度。
光束引导光学器件具有准直器单元,准直器单元用于准直来自辐射源的激光束。光束引导光学器件还包括聚焦单元,通过该聚焦单元,已经准直的激光束被聚焦或者可以被聚焦。光束引导光学器件还具有限定排出方向的光束偏转装置。限定排出方向的光束偏转装置被设计并布置成将用于表面处理的激光束从主光学方向偏转到排出方向。光束偏转装置被布置在光束路径中准直器单元下游,特别是聚焦单元的下游。
优选地,激光束首先在光束引导光学器件的方向上被引入准直器单元,并且然后在准直状态下经由聚焦单元上的相对应光学元件被聚焦,并且然后被聚焦单元引导到光束偏转装置,该光束偏转装置使激光束在排出方向上偏转,使得激光束从激光处理模块射出而没有任何进一步的偏转。因此,光束偏转装置限定了激光束的排出方向。在激光束被光束偏转装置在排出方向导向后,不发生进一步偏转。
根据本发明,现在规定激光处理模块包括旋转装置。该旋转装置被设计成使光束偏转装置相对于准直器单元或相对于准直器单元和聚焦单元围绕模块轴线旋转。这种旋转导致出射的激光束围绕模块轴线旋转。激光处理模块包括光路中在限定排出方向的光束偏转装置上游的另外光束偏转装置。这个另外的光束偏转装置使激光束在主光学方向上偏转。利用本构造,可以实现激光处理模块的细长设计。此外,激光处理模块的很少部件必须机械移动是有利的。可以减轻处理模块的磨损。旋转装置或具有相对应旋转装置的光束引导光学器件可以被设计成沿着主光学方向是细长的。
本发明的第二方面涉及一种设备,该设备特别地可以涉及根据权利要求1的前序部分或者根据本发明的第一方面的本发明的刚刚描述的实施例。然而,该设备不必根据刚刚描述的第一方面来设计,而是可以独立地设计并且设计用于激光粗糙化特别是表面,特别是工件开口,特别是缸膛的表面。根据第二方面的设备在任何情况下都包括至少一个装载和卸载站。在装载和卸载站中,待处理的工件可以被装载到设备中,此外,已经处理的工件可以从设备中移出(卸载)。例如,装载和卸载站可以经由传送带连接到其他处理机。然而,也可以想到,装载和卸载站可以经由入口装载机或手动装载和卸载。
根据第二发明方面的设备还具有工作站。工作站可以根据开头提到的第一发明方面的工作站来设计。在任何情况下,工作站都有在工作站中用于处理工件的激光处理模块。该激光处理模块优选根据第一发明方面的激光处理模块的特征来设计。
根据第二发明方面的设备还具有转移装置。转移装置又设计成在装载和卸载站与工作站之间进行工件转移。刚刚描述的第二发明方面的特征也可以在第一发明方面的设备中提供。出于本发明的目的,设备因此可以包括两个发明方面的个别特征。这导致特别有利的设备。根据第二发明方面的设备的特征在于,转移装置设计成执行通过旋转运动将待处理的工件从装载和卸载站转移到工作站的过程,并且同时执行通过相同的旋转运动将已处理的工件从工作站转移到装载和卸载站的过程。处理过的工件从工作站到装载和卸载站的工件转移和从装载和卸载站到工作站的工件转移因此可以同时进行。这样,根据本发明的设备的循环时间可以有利地得到改进。根据本发明的设备的特征还在于,它包括闭合装置,该闭合装置被布置和设计成在屏蔽状态下以激光安全的方式将装载和卸载站与工作站的工作空间分开。这确保了在激光处理期间,在上述转移过程中从工作站转移到装载和卸载站的已经被处理的工件可以从那里移出,同时在转移过程中从装载和卸载站转移到工作站的工件的激光处理过程可以在工作站中进行。
现在将描述两个发明方面的进一步发展。这两个方面的设备,特别地是第一方面的设备,可以包括旋转装置,该旋转装置包括直接驱动装置。这意味着用于旋转装置的驱动装置不是外部设计的,而是经由力传递装置,例如V形带、齿形带或类似的力传递机构传递到激光处理模块。
还可以进一步规定,直接驱动被设计为中空轴驱动装置。这意味着驱动装置的一个部件相对于壳体不可旋转地连接,另一个部件相对于壳体可旋转地布置,并且当驱动装置操作时,两个部件在相反方向旋转,旋转围绕中空轴驱动装置的轴线进行,并且两个零件围绕该轴线布置。中空轴驱动装置的轴线特别地与模块轴线重合。
中空轴驱动装置的定子优选以旋转固定的方式连接到激光处理模块的壳体。中空轴驱动装置的转子可以围绕中空轴驱动装置的轴线(其旋转轴线)旋转。该旋转轴线可以对应于模块轴线。
中空轴驱动装置的转子通常被制成中空的,使得光束可以沿着模块轴线被引导通过中空轴驱动装置的中空转子。所描述的直接驱动装置允许激光束的非常精确的旋转,并且通过将其设计为中空轴驱动装置,特别是利用刚刚描述的定子和转子的设计,激光处理模块的非常紧凑的设计是可能的,由此激光束的旋转可以以非常高的精度和速度进行。
这使得该设备可以非常灵活地设计。例如,可以提供至少两个这样的激光处理模块,激光处理模块又可以用于处理两个工件,或者根据工作循环,用于处理相同的工件(例如不同的开口)。这与上述转移装置相结合是特别有利的,特别是如果它可以将两个工件分别移入工作站或其工作空间。转盘作为设备内部转移系统的组合提供了特别的优点,特别是与开头和下面描述的激光处理模块的设计相结合。转移系统允许工作站的快速装载,其中,进而,经由设计有旋转光束偏转装置的激光处理模块,可以非常快速和精确地进行处理。激光处理模块具有较低水平的惯性,因为在旋转过程中,必须只使少数低质量的部件运动。因此,工作站的快速装载(转移系统)与工作站中的快速处理相结合,这允许整体较低的循环时间。这由闭合装置进一步支持,该闭合装置仅需要最小的打开阶段,以便允许同时装载和卸载工作站(转移系统的旋转运动)。因此,激光处理模块、转移装置和闭合装置相互补充,并且相互协调,以确保设备以低非生产时间实现最高可能的计时。
因为限定排出方向的光束偏转装置相对于该系统的其他光学部件旋转,所以它们可以被设计成刚性的,从而节省空间并且坚固。有利的是,在光学作用部件(影响激光束的类型或轮廓和/或方向)之外的操作期间只有光束偏转装置旋转或能够旋转。其他光学作用部件可以刚性连接到激光处理模块的壳体。
聚焦单元可以例如以旋转固定的方式连接到壳体;特别地,聚焦单元可以布置在转子内。聚焦单元可以经由延伸到转子中并连接到壳体的套筒状元件来保持。
激光束可以经由光导的连接点耦合或可耦合到激光处理模块中。
激光处理模块优选具有至少两个,特别是至少三个光束偏转装置。
离开激光处理模块的激光束的最终方向通过第一限定排出方向的光束偏转装置来确定。第一另外的光束偏转装置使激光束从特别地正交倾斜于主光学方向的一个方向,特别是其中准直器单元使激光束准直的准直器方向,偏转到主光学方向。沿着主光学方向,激光束撞击限定排出方向的光束偏转装置。借助于第二另外的光束偏转装置,光束可以被偏转,例如来自连接点,并且被引导到准直器单元上。然而,这种偏转是可选的。光束也可以在没有先前偏转的情况下被引导到准直器单元上。光导的连接点的位置可以在激光处理模块上相应地调整。
另一个光束偏转装置可以设计成干涉镜。另外的光束偏转装置可以沿着光束路径布置在准直器单元的下游。
聚焦单元特别地可以设置在第一光束偏转装置与限定排出方向的光束偏转装置之间。
在聚焦单元的下游,可以提供可透过辐射的密封单元,可透过辐射的密封单元防止污物渗透到激光处理模块或其具有准直器单元和聚焦单元的光路中。
被设计为干涉镜的另外的光束偏转装置被设计并布置成使得它将激光束在预期方向上引导到其他光学作用部件上(影响激光束的类型和/或方向),特别是引导到聚焦单元上,然后引导到限定排出方向的光束偏转装置上。通过被设计为干涉镜,另外的光束偏转装置可以在传感器连接点的方向上引导来自处理过的表面的光信号(例如,从处理过的表面发射的发射和/或反射的辐射信号)。为此,其被布置成使得激光束沿着光路在预期方向上被引导至工件表面,同时来自工件表面沿着光路的光信号与激光束的光路解耦,并且被馈送至传感器连接点(例如,经由另外的光学作用部件)。
可以规定激光处理模块包括锥形主轴部分。主轴部分通常是旋转对称的和细长的,或者换句话说,被设计成细长的。主轴部分用于插入待处理的工件开口中,并被相应地设计。这在处理缸膛时特别有利。特别地,可以设置为直接驱动装置布置在距主轴部分一定距离处。该间距与沿模块轴线的视图相关。直接驱动装置通常布置在主轴部分上方。“上方”是指主轴部分的直接驱动装置布置在工件开口的一侧,在插入过程中主轴部分从该侧被引入工件开口内。
由于主光学方向与模块轴线重合,光束引导光学器件被设计成使得激光束部分地沿着模块轴线行进,并沿着该轴线被引导到光束偏转装置上。特别地,激光束可以沿着模块轴线从聚焦单元被引导到光束偏转装置。换句话说,激光束在聚焦单元与光束偏转装置之间沿着模块轴线行进。
激光处理模块可以包括工艺气体流动路径。该工艺气体流动路径可以包括沿着主光学方向延伸的一部分。该部分可以布置在第一另外的光束偏转装置与限定排出方向的光束偏转装置之间。工艺气体流动路径优选地被布置和设计成使得工艺气体经由激光束的出口开口离开激光处理模块,并且经由工艺气体流动路径被引导至待处理的工件表面上的点。为此,出口开口可以设计成类似喷嘴(对流出的工艺气体施加一个方向)。
关于定位装置,可以规定,定位装置可以在布置在工作站中以进行处理的工件与激光处理模块之间产生相对运动,该相对运动在正交于模块轴线的平面中或者在模块轴线的方向上进行;特别地,模块轴线可以在竖直方向上延伸,设备通常对准,并且工件与激光处理模块之间的相对运动可以相应地在水平和竖直方向上进行。例如,激光处理模块在水平方向上从一个缸膛移动到下一个缸膛,并且可以想到主轴部分在竖直方向下降到相应的缸膛中。
如上文所描述,定位装置可以包括滑动布置,特别是可以规定提供复合滑动布置,利用该复合滑动布置可以实现彼此正交的相对运动方向。特别地,可以在彼此正交的方向上进行的相对运动也可以叠加进行(在同时的意义上)。
激光处理模块可以被设计成直接布置在滑动布置上。如上面所叙述的,对于第一发明方面,第二发明方面的个别特征可以个别提供或者以各种组合提供,反之亦然。在这两个方面,但特别是在第二发明方面,可以规定,转移装置被设计成转盘。因此,转移装置形成工件输送装置,该工件输送装置经由旋转运动将工件转移进出工作站。转移装置可以设计成具有板形表面。支撑表面可以设置在个别工件插座或预期的工件位置之间,其也在旋转运动期间旋转。
特别地,可以规定转移装置被设计为升降转盘,除了旋转运动之外,该升降转盘还能够沿着旋转轴线进行提升和降低运动。转盘可以设计成在相同的转移过程中同时将至少两个工件从装载和卸载站转移到工作站,反之亦然,将至少两个工件同时从工作站转移到装载和卸载站。为此目的,转移装置(或转盘)通常具有用于工件的相应数量的插座(或为工件提供的位置),每个插座都以180度偏移布置在转盘上。特别地,180度偏移布置使得能够以简单的方式允许工件同时被运进和运出装载和卸载站或工作站。
闭合装置可以包括可打开和可关闭的分隔壁。分隔壁与转移装置的组合使用允许特别短的装载时间。分隔壁打开,同时转移装置开始旋转。转移装置的这种旋转运动使得工作站同时被装载和卸载。一旦工件经过分隔壁的位置,就可以再次关闭分隔壁。这种分隔壁可以具有双壁结构,以便满足主动激光保护。腔可以由外壁通过这种双壁外壁来界定,并且分隔壁还可以包括传感器单元,该传感器单元被设计并布置成检测来自激光处理模块的激光辐射何时穿透到腔中。以这种方式,一旦在包围腔的外壁的一部分被激光损坏并且激光辐射穿透内部,在界定腔的另一外壁被破坏并且激光辐射可以从工作站或工作空间穿透到周围环境之前,闭合装置实际上可以进行检测。然后可以相应地紧急关闭激光处理模块。这增加了根据本发明的设备的安全性。
工作空间可以设计有抽吸装置。抽吸装置特别地可以包括布置在工作空间中的多个抽吸开口。特别地,在工作站的工作空间中处理过的工件的处理位置,抽吸开口可以布置在被加工的工件的下方。激光处理模块可以从上方引入工件开口并进行激光处理。抽吸装置或抽吸开口可以产生从处理过的开口的顶部进入抽吸装置的空气或气体流,并高效地吸走在激光处理过程中出现的任何污物。相应地,可能阻碍或使进一步激光处理变得困难或损害其品质的气体污染物也被吸出。
还可以规定该设备包括与工作站的工作空间分开的至少一个光束源隔室。用于为处理提供的激光束的辐射源可以布置在光束源隔室中。可以提供光导,以便将激光束从辐射源引导到工作空间中或者引导到工作站处的激光处理模块。因此,可以规定,用于激光处理模块的辐射源在空间上与工作站分开地布置在单独的光束源隔室中。这增加了系统的操作安全性。这也使得更容易保护辐射源免受污染。因此,工作空间也可以设计成较小的体积,使得抽吸污染空气简单高效。
本发明还涉及一种方法。因此,这种方法涉及一种用于对工件开口进行激光处理,特别地是对工件开口进行激光粗糙化的方法,其中这种工件开口特别地可以是缸膛的表面。使用用于激光处理的设备来执行相对应的方法。这种用于激光处理的设备可以是例如根据第一或第二发明方面或根据它们的通用术语的设备。
该方法包括以下步骤:
将待处理的工件定位在设备的工作站中;
将设备的激光处理模块的主轴部分定位在位于工作站中的工件的待处理工件开口中;
待处理工件的定位意味着经由旋转运动进行的转移过程,该转移过程通过上述转移设备进行。激光处理模块的主轴部分在工件开口中的定位可以是例如通过移动激光处理模块的缩回运动;为此,激光处理模块优选在竖直方向上移动,特别是向下移动。还可以想到,工件实际上被推到激光处理模块的主轴部分上。两个部件的叠加移动也是可以想到的。借助于经由激光处理模块导入工件开口的特别连续的激光束来照射已处理的工件开口的表面。
在表面的这种照射期间,激光束围绕模块轴线旋转。旋转优选以恒定的角速度进行。然而,角速度也可以是可变的。
当执行该方法时,使用激光处理模块,该激光处理模块包括光束引导光学器件,该光束引导光学器件被设计成将用于表面处理的激光束在相对于模块轴线和正交于模块轴线的平面倾斜的排出方向上引导到待处理的表面上。
根据本发明的方法的特征在于,对于激光束的旋转,使用于表面处理的激光束在排出方向上偏转的激光处理模块的光束偏转装置相对于用于准直来自辐射源的激光束的激光处理模块的准直器单元或者相对于激光处理模块的准直器单元和聚焦单元(聚焦单元被设计成使准直激光束聚焦)围绕模块轴线旋转,以便实现出射激光束围绕模块轴线的旋转。
光束偏转装置的旋转运动可以与工件与激光处理模块的光束偏转装置之间的平移相对叠加。平移相对运动可以通过激光处理模块、工件或两者的运动来实现,或者通常通过工件与激光处理模块之间的相对运动来实现。平移相对运动相应地沿着模块轴线的方向导向。特别地,可以想到,激光处理模块以沿着模块轴线的平移方式(以相应提供的速度)被引入工件开口中,并且平行于该引入运动,激光围绕模块轴线的旋转被叠加,因此(以连续或增量平移运动)工件的表面被照射。
可以规定平移运动连续发生。这导致激光的一种螺旋的,横移的路径。然而,平移运动也可以逐步进行,使得光束偏转装置几乎总是旋转360度,然后激光器在一个步骤中进一步向内移动到工件开口中。这可以导致表面的准环形扫描路径。激光束不必扫描整个360度的表面。
可以规定,激光处理模块包括旋转装置,该旋转装置被设计成使光束偏转装置相对于准直器装置或相对于准直器装置和聚焦单元围绕模块轴线旋转。这种旋转导致出射激光束围绕模块轴线旋转。旋转装置可以包括直接驱动装置,当从模块轴线方向看时,该直接驱动装置布置在待处理工件的工件开口前方的激光处理模块的主轴部分的外侧,特别是在主轴部分的上方或主轴部分的插入方向上。换句话说,然而,在用主轴部分进行处理的过程中,激光处理模块没有缩回直到直接驱动装置进入到工件开口中。
可以规定,在根据本发明的方法的范围内,激光处理步骤之后是对处理过的表面进行刷扫,以便例如移出由脏污引起的表面的过度不平整。作为这点的替代或补充,也可以发生吹除。为此目的,根据本发明的设备还可以包括相对应的刷扫站或吹除站,该刷扫站或吹除站在空间上与工作站分开布置。具体而言,可以规定工件可以经由设备的工件输送装置从装载和卸载站馈送到刷扫站和/或吹除站。
在根据本发明的方法中,可以在激光处理的同时提供对处理过程的监测。为了这种监测,来自处理过的表面的光信号最初可以沿着用于激光处理模块中的处理的激光的光路被引导,并且通过光束偏转装置与激光束的光路解耦,该光束偏转装置特别地可以被设计为干涉镜。该解耦信号然后可以被馈送到传感器连接点。
在根据本发明的方法中,在转移装置的转移过程中,待处理的工件可以定位在设备的工作站中,在转移过程中,已经处理的工件同时通过转移装置的旋转运动从工作站移出。可以规定,在转移过程中,两个工件被送进和送出工作站。在待处理的工件开口的表面的照射期间,可以通过激光处理模块对每个工件同时处理一个工件开口。也有可能最初使用两个不同的激光处理模块在工件中同时处理至少两个工件开口,然后通过激光处理模块处理另外的工件开口;这些另外的工件开口例如可以是另一个工件中的两个工件开口。
在根据本发明的方法中,可以规定在空间上将工作空间与装载和卸载站分开的闭合装置被打开以执行转移过程。从空间上看,在转移过程中离开工作站的那些工件和在转移过程中移动到工作站的工件同时经过闭合装置。然后关闭该闭合装置,使得工作空间与装载和卸载站在空间上分开。
还可以通过形成在转移装置上的转台来提供壁状闭合装置,该转台最初通过旋转转台枢转到打开位置,并且当旋转完成180°时,在与初始状态相反的位置再次将工作站或工作空间与装载和卸载站分开。例如,竖直布置在转盘或转台上的壁可以设置在转台或转盘的两个相对布置的工件保持器之间。
在根据本发明的方法中,可以规定通过激光处理具有多个待处理开口的至少一个工件;在这种情况下,当前未处理的开口可以在激光处理期间被使用中分配给激光处理模块的覆盖物覆盖。
激光处理模块可以包括至少一个第一密封气体装置或第一密封气体流动路径,第一密封气体装置或第一密封气体流动路径具有密封气体出口,该密封气体出口布置在激光束的出口开口的区域中,但是与激光束的出口开口相距一定距离。密封气体出口特别地可以布置在主轴部分上。密封气体出口特别地可以布置在包括出口的主轴部分的一半上。当沿着模块轴线观察时,密封气体入口可以布置在激光处理模块的壳体上用于该第一密封气体流动路径,与旋转装置(直接驱动装置)相距一定距离,特别是布置成与主轴部分相对(当沿着模块轴线观察时,旋转装置布置在密封气体入口与密封气体出口之间)。密封气体出口特别地可以布置在主轴部分上,位于主轴的旋转部分与主轴部分的相对于壳体不可旋转的部分之间。密封气体出口可以设计成在周向方向上是圆形的。特别地,第一密封气体流动路径也可以被设计成使得密封气体流过旋转装置的中空轴驱动装置的转子与定子之间的间隙。
激光处理模块可替代地或附加地也可以设计有第二密封气体装置或第二密封气体流动路径(术语“第一”和“第二”在此仅用于区分两个密封气体流动路径,并不旨在将密封气体流动路径中的任何一个描述为另一个的条件。然而,激光处理模块优选地具有这里描述的两个密封气体流动路径)。
第二密封气体装置(第二密封气体入口)的连接件可以布置在壳体的其中布置准直器单元的一部分中。壳体的这一部分可以与包括旋转装置(直接驱动装置)的壳体部分分开设计。该部分特别地可以设计成在径向方向上是细长的。第二密封气体流动路径可以特别包括准直器单元区域中,特别是从激光源到准直器单元的连接点的光路,以及从准直器单元到聚焦单元的光路。可以规定,(第二密封气体装置的)密封气体填充套筒状元件,聚焦单元从其内部保持在该套筒状元件中。
在根据本发明的方法中,密封气体被引入激光处理模块,使得其相对于大气处于过压状态,从而密封气体总是在任何泄漏点和第一密封气体流动路径的出口处渗透到外部,并且防止激光处理模块中的杂质进入。
到目前为止描述的密封气体流动路径彼此流体分离,并且每个都具有它们自己的入口。可以想象,两个密封气体流动路径彼此流体连接,特别是具有单个公共入口。
激光处理模块还可以包括工艺气体连接件和工艺气体流动路径。
特别地,如果激光处理模块被设计成没有密封单元,则可以提供工艺气体的使用。工艺气体被引入激光处理模块。工艺气体流动路径特别设计成使得工艺气体沿着用于保持聚焦单元的套筒状元件的外部流动。
工艺气体优选在出口开口方向流动,并经由出口开口离开激光处理模块。出口开口优选地被配置成使得它形成一种类型的喷嘴,该喷嘴将工艺气体的出射束导向到工件表面上被激光束处理的点上。工艺气体包围激光束,因此在处理表面时可以作为一种保护气体。
激光处理模块可以被设计成使得工艺气体流动路径通过密封件与第一密封气体流动路径分开。密封件特别地可以布置在壳体的静止部分与激光处理模块的可由旋转装置旋转的部分之间。
根据本发明,特别是在根据本发明的方法中,工艺气体和密封气体各自可以是氮气。密封气体也可以是净化的压缩空气。
激光处理之后可以是光学或触觉表面测量装置,该装置通过测量来检查处理结果,或者在偏离目标品质的情况下,对后续零件的处理执行反馈功能,利用该反馈功能来优化处理参数。
可以规定可以经由转移装置的旋转运动来打开和关闭该关闭装置。可以规定,形成闭合装置的分隔壁面向工作站的一侧随着每次转移过程而改变。可以规定,闭合装置包括固定地布置在转盘上的分隔壁。
附图说明
下面参照附图解释本发明的更多细节和特征,其中:
图1是根据本发明的用于激光处理的设备的透视图,设备的壳体未示出;
图2是通过根据本发明的示意性示出的设备的剖视图;
图3是示意性示出的根据本发明的设备的平面图,该设备的壳体仅被部分示出;
图4是设备壳体的平面图,具有穿过壳体的部分开口;
图5示出了在根据本发明的设备中使用的激光处理模块;
图6是通过图5的激光处理模块的示意图的剖视图;
图7是来自图5和6的激光处理模块的光束路径的示意图;
图8是对应于图6的剖视图,其中示出了第一密封气体装置或其密封气流;
图9是对应于图6的剖视图,其中示出了第二密封气体装置或其密封气流;
图10是对应于图6的剖视图,其中示出了工艺气体流动路径;
图11是分隔壁的示意图;并且
图12是替代分隔壁的示意图。
在下图中,相应的零件和区域具有相同的附图标记。
具体实施方式
图1示出了用于激光处理的设备10的示意性透视图。在本例中,该设备被设计用于激光粗糙化彼此相距一定距离的多个工件开口的表面,在本例中即缸膛。该设备包括工作站12,在该工作站中,待处理的工件14可以进行激光处理,在本例中,工件14由具有多个缸膛16的缸体形成。
待处理的工件通过转移装置18馈送到工作站12。在本例中,转移装置18被设计成转盘的形式。
转移装置18被设计并且布置成使得它能够通过在从装载和卸载站22到工作站12的转移过程中的旋转运动来转移工件14,工件14经由带式输送机20被输送到装载和卸载站22。同时,借助于转移装置18,(已经被处理过的)工件14可以在相同的转移过程中同时从工作站12移动到装载和卸载站22。
在本例中,设备10被显示为没有通常存在的壳体24。设备10包括机床26。除了机床26之外,该设备还包括定位装置28,在本例中,该定位装置被设计为滑动布置30(在这种情况下为复合滑动布置)。两个激光处理模块32布置在滑动布置30或定位装置28上。下面结合图5至7详细解释激光处理模块32及其结构。
一个或多个激光处理模块32与相对应工件14之间的相对运动可以通过定位装置28实现。在本例中,激光处理模块32为此目的移动,而工件14保持在它们相对于机床26的位置。
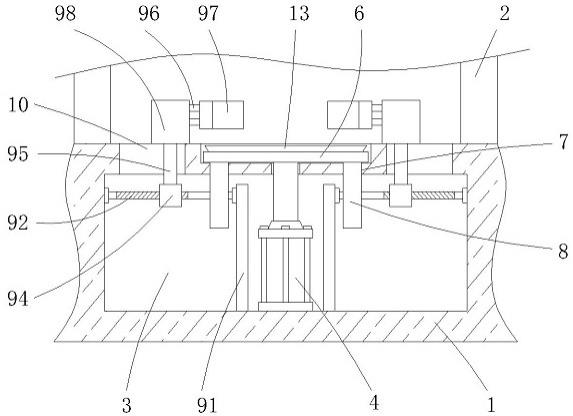
图2以示意性侧剖视图示出了图1的设备10。在图2中,示意性地示出了壳体24。壳体限定了布置在工作站周围的工作空间34。除了工作空间34之外,设备10还包括与工作空间34分开的辐射源隔室36。辐射源38布置在辐射源隔室36中,辐射源38提供用于处理的激光束,其被耦合到激光处理模块32中。辐射源38经由光导40连接到激光处理模块32,用于使激光束耦合进入。
设备10具有第一抽吸装置42,其通常使工作空间34通风。此外,设备10具有用于每个激光处理模块32的第二或多个第二抽吸装置44,在每种情况下,每个第二抽吸装置44在待处理的工件开口下方具有抽吸开口。激光处理模块32每个都具有隔膜装置45,该隔膜装置45被设计成使得它可以关闭与用于处理的开口相距一定距离的任何工件开口。每个激光处理模块32可以相对于相应的隔膜装置45移动。隔膜装置45可以放置在缸体14上,并且激光处理模块32可以通过隔膜装置45中的开口插入工件或缸体14或缸膛16中。
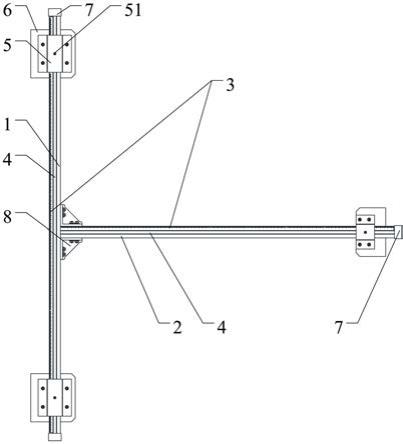
从图2和图3中可以清楚地看出,设备10具有闭合装置46,该闭合装置包括可以打开和关闭的分隔壁48。这可以竖直或水平移动,以打开和关闭。在本例中,分隔壁48被设计成可在竖直方向上移动,这在图2中由带有附图标记50的双箭头表示。
工作站12或工作站12的工作空间可以通过闭合装置46或可以打开和关闭的分隔壁而与装载和卸载站22分开。在这种情况下,可分开意味着辐射安全的分开,使得如果例如激光处理模块32在没有提供工件14的情况下意外开启,则从激光处理模块32出射的激光束不能从工作空间穿透到装载和卸载站22中。
为此目的,如果分隔壁48和其他壁具有双壁结构是有利的。在这种双壁结构中,分隔壁46内的腔51可以由外壁52界定。分隔壁46可以包括传感器单元54,其仅在图3中象征性地示出,并且被设计并布置成检测何时来自激光处理模块32的激光器的激光辐射穿透到分隔壁48的腔51中。
传感器单元54因此可以检测分隔壁46的外壁是否被激光束破坏,并且因此可以在界定腔51的两个外壁都被激光完全穿透之前执行激光处理模块32的紧急关闭。
闭合装置46与转移装置18相结合提供了本设备10的特殊优点。转移装置18可以同时装载工作站12,并且通过转移过程中的旋转运动将已经处理的工件从工作站12卸载回装载和卸载站22。为此,闭合装置46必须打开。由于装载和卸载过程可以同时进行,因此闭合装置46只需要最小的打开时间,并且确保了本设备10的特别高的循环时间和操作安全性。为了更进一步增加循环时间,规定设计成转盘的转移装置18,在这种情况下,每次转移过程可以将两个工件14从装载和卸载站22转移到工作站12,反之亦然,并且可以在相同的转移过程中同时将两个工件14从工作站12转移到装载和卸载站22。
定位装置28被设计成使得两个激光处理模块32可以用于处理不同的工件14,但是同时,定位装置28也允许激光处理模块32移动,使得两个激光处理模块32可以处理相同的工件14,例如在相邻的开口中。这也由激光处理模块32被设计得特别纤细和节省空间的事实来支持。为此,激光处理模块32具有特殊的结构,其允许同时具有高精度和可靠性的紧凑设计。激光处理模块32各自如图5至7所示构造。
图7示出了激光处理模块32的光束引导光学器件60的基本结构。光束引导光学器件60具有准直器单元62。可以使用相应的操作装置63来设置准直器单元62,或者可以使用操作装置63来设置准直光束的直径。准直器单元62也可以被设计成使得它可以被机电调整。光束引导光学器件60还具有设计为聚焦透镜的聚焦单元64。除了准直器单元62和聚焦单元64之外,光束引导光学器件60还具有限定排出方向的光束偏转装置66。光束偏转装置66限定了排出方向90,即激光束离开激光处理模块32而不进一步偏转或者被导向到待处理表面上的方向。激光束86沿着主光学方向67撞击限定排出方向的光束偏转装置66,主光学方向67沿着模块轴线84延伸。光束引导光学器件60还包括第一另外的光束偏转装置68和第二另外的光束偏转装置69。
第一另外的光束偏转装置68使激光束86在主光学方向67上偏转。激光束86沿着主光学方向67经过聚焦单元64。
第二另外的光束偏转装置69使激光束86在倾斜于主光学方向67的方向71(在本例中是正交的)上偏转。在倾斜于主光学方向67的方向71上,光束撞击第一另外的光束偏转装置68。
图5在侧视图中示出了激光处理模块32,光束引导光学器件60布置在壳体78中。
本激光处理模块32被设计成使得形成旋转装置70的直接驱动装置72以及光束成形和偏转光学部件(光束引导光学部件60)都被布置在激光处理模块32中。这使得激光处理模块32易于替换、紧凑并且抗损坏。所有上述部件可以以密封的方式容纳在激光处理模块32中,并且激光处理模块32仅具有最少的连接点(例如用于使激光束86耦合进入的光导40的连接点102)。因此,该装置可以通过另外的激光处理模块32以简单的方式进行补充,该激光处理模块32与转移装置相结合,允许关于设备的时钟速率的高度灵活性。因此,可以提供多个激光处理模块32,这些激光处理模块32中每个模块可以处理多个工件,以便以特别高的通过量移动该设备。转移设备可以在每个转移过程中将多个工件输送到工作站中。另一方面,如果只需要一个小的循环,该设备可以是准降级的,其中,例如,每个转移过程只有一个工件被移动到工作站中,并且只有一个激光处理模块32被提供来顺序处理个别工件开口。
在图6的剖视图中,特别清楚地示出了激光处理模块32包括旋转装置70。旋转装置70在本例中以直接驱动装置72的形式实施,该直接驱动装置72被设计为中空轴驱动装置74。
中空轴驱动装置74的定子76不可旋转地连接到激光处理模块32的壳体78。中空轴驱动装置74的转子80布置在激光处理模块32中,使得其能够围绕与模块轴线84重合的旋转轴线82旋转。图5和6示出了正交于模块轴线84布置的平面85。
当中空轴驱动装置74被致动时,使转子80和连接到其上的部件围绕模块轴线84旋转。结果,使光束偏转装置66旋转,使得被提供用于处理的准直和聚焦的激光束86以围绕模块轴线84旋转的方式在排出方向(在这种情况下由带有附图标记90的箭头示出)上从激光处理模块32出射,并且相应地撞击待处理工件14的工件开口16的表面92。
排出方向90相对于模块轴线84和正交于模块轴线84布置的平面85倾斜,即,它相对于两者以不同于零度的角度(相对于平面85的角度α和相对于模块轴线84的角度β)延伸。优选地,角度α和角度β都为至少10°,为至少20°,至少30°。
激光处理模块32具有主轴部分94,该主轴部分94被设计用于插入待处理的工件开口16中。主轴部分94包括用于激光束86的出口开口95。激光束86在排出方向90上从出口开口95离开激光处理模块32。
当沿着模块轴线84观察时,直接驱动装置72或中空轴驱动装置74布置在距主轴部分94一定距离处,主轴部分94又设计成插入待处理的工件开口16中。
通过将激光处理模块32的驱动装置设计为直接驱动装置72,或者在本例中,设计为中空轴驱动装置74,激光处理模块32可以被制造得非常紧凑。激光束86的出口开口95可以有利地引入待处理的工件开口16中,使得工件开口16的表面可以通过主轴部分94高效地处理,主轴部分94经由轴承布置98相对于激光处理模块32的壳体78的其余部分可旋转地布置。通过提供直接驱动装置72,特别精确的处理是可能的,其与激光处理模块32的紧凑设计相结合。此外,设备10可以以简单的方式配备有另外的激光处理模块32,使得设备10的循环时间非常可变或者可以以简单的方式增加。
直接驱动装置72被设计成相对于主轴部分94沿着模块轴线84偏移。作为偏移布置的结果,主轴部分94可以被设计成不包括直接驱动装置72的任何部分,并且可以被设计成相应地纤细的。
在激光处理模块的操作过程中,主轴部分94可以插入工件开口中,并且然后通过旋转光束偏转装置66,从激光处理模块32出射的激光束86可以围绕模块轴线84在排出方向90上旋转。激光处理模块32下降到工件开口中可以叠加在激光束86的这种旋转上。激光处理模块通常可以相对于工件沿着模块轴线84移动(激光处理模块32和/或工件14移动)。这种移动可以一步一步地进行,使得激光处理以准环形或连续的方式进行,使得沿着开口表面的一种螺旋路径被激光处理。
由于光束偏转装置66相对于系统的其他光学部件旋转,因此它们可以设计成刚性的,从而节省空间并且坚固。只有光束偏转装置66旋转。在本例中,聚焦单元64以旋转固定的方式连接到壳体78。聚焦单元64布置在转子80内。聚焦单元64经由套筒状元件101保持,套筒状元件101延伸到转子80中并连接到壳体78。套筒状元件101与模块轴线84同心布置。
激光束经由光导40的连接点102耦合到激光处理模块32中。连接点102可以被设计并布置成使得激光束最初相对于主光学方向87偏移(如图所示)或倾斜地耦合到激光处理模块32中。借助于第二另外的光束偏转装置69,激光束86在本例中被引导到准直器单元62,并由此被引导到第二另外的光束偏转装置68,该第二另外的光束偏转装置68在本例中被设计为干涉镜。第二另外的光束偏转装置68将激光束86偏转到聚焦单元64上,并从那里通过射线可透过的密封单元100,经由光束偏转装置66,通过出口开口95到达待处理的表面92上。射线可透过的密封单元100是可选的。
第一另外的光束偏转装置68被设计为干涉镜,以便在传感器连接点104的方向上引导来自处理过的表面92的光信号。第一另外的光束偏转装置68将来自处理过的表面92的光信号沿着主光学方向引导到传感器连接点104。
可透过辐射的密封单元100沿着光束方向布置在光束偏转装置64的前方,并且被配置成防止在激光处理期间出现的粒子或其他污染物进入激光处理模块32的光束路径。
在本设备10中实施的两个发明的各个方面也可以各自个别地提供,但是如果两个发明的方面都在根据本发明的设备中实施,则是特别有利的。
图8示出了剖视图(对应于图6的剖视图),为了清楚起见,没有示出大多数附图标记。在图8中,示出了第一密封气体装置106或其流动路径。密封气体(如箭头所示)防止杂质进入光路。密封气体经由第一密封气体入口108被引入激光处理模块32。密封气体出口110布置在主轴部分94上。密封气体出口110被设计成在周向方向U(主轴部分的圆周)上是圆形的。第一密封气体流动路径或密封气体装置106也可以特别设计成使得密封气体流过旋转装置的中空轴驱动装置的转子80与定子76之间的间隙。
替代地或附加地,激光处理模块32也可以设计有第二密封气体装置112或第二密封气体流动路径。为了清楚起见,这在图9中示出。第二密封气体装置112经由第二密封气体连接件114被馈送密封气体。密封气体连接件114布置在壳体78的一部分116中,准直器单元62布置在该部分中。壳体78的该部分116与壳体78的包括旋转装置70(直接驱动装置)的部分118分开设计。
第二密封气体装置112的密封气体围绕准直器62流动。第二密封气体装置112的密封气体填充套筒状元件101,其中聚焦单元64保持在该套筒状元件中。
在图10中,在对应于图6、8和9的图示中示出了工艺气体的使用。工艺气体流动路径120被设计成使得工艺气体(由箭头示出)沿着用于保持聚焦单元64的套筒状元件101的外部流动。
图10的激光处理模块32与图6、8和9所示的不同之处在于,没有设置密封单元100。工艺气体连续流过主轴部分94的内部。
激光处理模块32可以被设计成使得工艺气体流动路径120经由密封件122与第一密封气体流动路径106分开。密封件122特别地可以布置在壳体78的静止部分124与激光处理模块32的可由旋转装置70旋转的部分126之间。
工艺气体经由工艺气体入口被引入激光处理模块32。它围绕套筒状元件101的外部流动。它在主轴部分94内流动。工艺气体经由出口开口95离开激光处理模块32。出口开口95被配置成使得它形成一种类型的喷嘴,该喷嘴将工艺气体的出射流导向到工件表面上被激光束处理的点上。因此,当处理表面时,工艺气体可以作为一种保护气体。
图11中示出了具有腔51的分隔壁46。分隔壁具有外壁52,外壁进而包括第一侧表面52a和第二侧表面52b,第一侧表面52a和第二侧表面52b一起界定腔51。
根据本发明的闭合装置46在图12中示意性示出,其中分隔壁连接到转移装置18,并经由其旋转运动打开和关闭。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。