1.本实用新型涉及一种社区清洁设备,具体涉及一种用于封闭式小区的智能清扫车。
背景技术:
2.随着生活水平的不断提高,封闭式小区在城市中已经成为主流形式。当遇到下雨天时,封闭式小区的道路中就会出现大量积水,给行人造成极大的困扰。
3.另外,小区中经常会有大量住户饲养宠物,由此导致宠物粪便清理问题。虽然小区中会有相应要求,或依靠宠物主人的自觉,但实际情况中,还是有很多时候,在小区中有未处理的宠物粪便。如果依靠物业清洁人员进行定时巡检,由于其存在巡检周期,因此会导致宠物粪便得不到及时清洁,同样会给行人带来困扰。
技术实现要素:
4.本实用新型针对现有技术中的上述不足,提供了一种能够解决现有技术中封闭式小区中的积水和宠物粪便难以及时清理的问题的用于封闭式小区的智能清扫车。
5.为解决上述技术问题,本实用新型采用了下列技术方案:
6.提供了一种用于封闭式小区的智能清扫车,其包括外壳,外壳内设置有运动部、动力部、吸水部、清扫部和控制部;
7.所述外壳包括相互连接的上外壳和底板,上外壳呈圆盘形,上外壳下部外侧套设有保护套,上外壳上部安装有摄像头;
8.所述运动部包括设置于主体部下方的车轮;所述动力部设置于底板上并与运动部传动连接;
9.所述清扫部包括设置于底板上偏离动力部一侧的承接口,承接口内套设有承接袋,承接口一侧设置有支架,支架上安装有连接推杆,承接口邻近支架一侧与弯折板铰接,弯折板邻近支架一端与底板铰接,弯折板偏离支架一端与连接推杆铰接;
10.所述吸水部包括位于延伸部下方的管口,管口安装于设置在底板上的管口推杆输出端,管口通过吸水管依次与抽吸泵和水箱连接,抽吸泵与蓄电池电连接;
11.所述控制部包括与动力部、摄像头和抽吸泵电连接的控制器,外壳底部均布有若干液体检测传感器,所述液体检测传感器与控制器电连接。
12.本实用新型提供的上述用于封闭式小区的智能清扫车的主要有益效果在于:
13.本实用新型提供的用于封闭式小区的智能清扫车,通过在上外壳外侧设置保护套,避免外壳与小区中各种设施碰撞,影响智能清扫车的使用寿命;通过设置声光报警器,以提醒小区住户,及时避让。
14.通过设置承接袋,以存放清理的宠物粪便;通过设置连接推杆与弯折板配合,当连接推杆推动弯折板伸长时,使弯折板前端向下运动至与地面接触,通过智能清扫车向前运动,将地上前方的宠物粪便铲起,通过连接推杆收缩,就弯折板抬起至宠物粪便所在位置倾
斜,由此使粪便在重力作用下掉入承接袋中。
15.通过设置承接口和承接袋,方便清洁人员直接将承接袋抽出和更换,提高清洁效率。
16.通过将管口设置为与管口推杆连接,当待吸水的位置低于底板下方较深处时,可以向下伸出吸水管,以保证吸水效果。
17.通过设置运动部,以带动智能清扫车移动;通过设置动力部,以为运动部、声光报警器的工作提供动力;通过设置吸水部,以进行吸水作业;通过设置控制部,以驱动各部件的工作,实现智能吸水功能。
附图说明
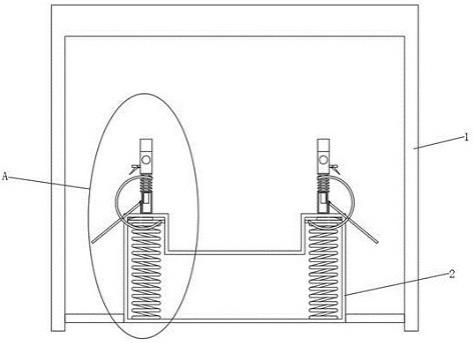
18.图1为本实用新型的结构示意图。
19.图2为底板上各部件的位置关系示意图。
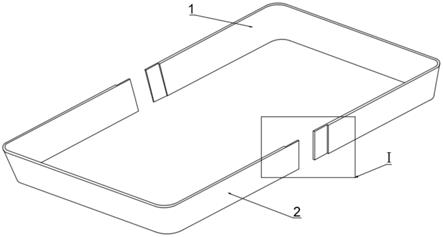
20.图3为本实用新型的俯视图。
21.图4为清扫部的结构示意图。
22.图5为运动部的结构示意图。
23.图6为充电桩的结构示意图。
24.其中,1、外壳,11、上外壳,12、保护套,13、声光报警器,14、转动台, 15、摄像头,16、转动电机,17、底板,2、运动部,21、车轮,22、传动轴, 23、转动架,3、动力部,31、蓄电池,32、转向电机,33、伺服电机,4、吸水部,41、吸水管,42、管口,43、过滤器,44、过滤仓,45、水箱,46、重量传感器,47、抽吸泵,48、管口推杆,5、控制部,51、控制器,52、无线通讯模块,53、数据存储器,54、液体检测传感器,55、底部距离传感器,6、充电桩,61、充电口,62、排水口,7、清扫部,71、支架,72、弯折板,73、连接推杆,74、承接口,75、承接袋。
具体实施方式
25.下面结合附图对本实用新型作进一步说明:
26.如图1所示,其为用于封闭式小区的智能清扫车的结构示意图。
27.本实用新型的用于封闭式小区的智能清扫车包括外壳1,外壳1内设置有运动部2、动力部3、吸水部4、清扫部7和控制部5。
28.具体的,如图5所示,外壳1包括相互连接的上外壳11和底板17,上外壳11呈圆盘形,上外壳11下部外侧套设有保护套12,保护套12为弹性材料,上外壳11上部安装有声光报警器13。通过声光报警器13提醒智能清扫车移动路线上的小区住户进行避让,避免碰撞。
29.运动部2包括通过转动架23和传动轴22安装于底板17下方的车轮21。通过用转动架23和传动轴22与车轮21连接,增加车轮21与底板17的间距,从而提高智能清扫车的越障能力,以适应不同小区的底面环境。
30.动力部3包括与传动轴22传动连接的伺服电机33和与转向架23传动连接的转向电机32,伺服电机33和转向电机32分别与蓄电池31电连接。
31.所述清扫部7包括设置于底板17上偏离动力部3一侧的承接口74,承接口 74内套设有承接袋75,承接口74一侧设置有支架71,支架71上安装有连接推杆73,承接口74邻近支架71一侧与弯折板72铰接,弯折板72邻近支架71一端与底板17铰接,弯折板72偏离支架71
一端与连接推杆73铰接。
32.吸水部4包括位于延伸部12下方的管口42,管口42安装于设置在底板17 上的管口推杆48输出端,管口42通过吸水管41依次与抽吸泵47和水箱45连接,抽吸泵47与蓄电池31电连接。通过抽吸泵47工作,将管口42处的积水通过吸水管41抽入水箱45中。
33.控制部5包括与动力部3、声光报警器13、连接推杆73和抽吸泵47电连接的控制器51,外壳1底部均布有若干液体检测传感器54,液体检测传感器54 与控制器51电连接。
34.控制部5包括与控制器51电连接的gps定位仪,gps定位仪设置于底板 17上。
35.通过设置多个液体检测传感器54,当所有液体检测传感器54均监测到下方存在液体时,表明积水较多,达到需要抽吸的程度;而达不到抽吸程度时,积水量较小,可以通过自然蒸发清除,从而能够节省资源,提高清洁效率。
36.进一步地,如图2所示,底板17上位于管口42邻近位置处设置有底部距离传感器55。通过底部距离传感器55监测管口42正下方的积水到管口42的距离,从而伸长管口推杆48,以有效吸水。
37.如图3所示,转向电机32架设于底板17上,转向电机32的输出端与转向架23连接,伺服电机33位于转向架23上并随同转向架23转动,转向架23下端与车轮21的轮轴铰接,伺服电机33的输出端通过传动轴22与车轮21传动连接,传动轴22位于转向架23侧壁内。由此,通过转向电机32带动车轮21 转向,通过伺服电机33带动车轮21正转和反转,以实现智能清扫车的移动。
38.如图3所示,主体部11中部安装有转动台14,转动台14上安装有测距仪和摄像头15,测距仪和摄像头15分别与控制器5电连接。同时,底板17上设置有与控制器5电连接的gps定位仪。通过摄像头15拍摄智能清扫车运动过程中检测到的图像,并通过gps定位仪和测距仪配合实现定位,既能起到替代人员进行远程巡检的作用,又能通过激光测距、图像识别与gps定位结合,实现智能清扫车的定位功能。
39.弯折板72为三个相互铰接的长条板,偏离承接口74一端的长条板与连接推杆73铰接。连接推杆73与支架71铰接部位于底板17上方。承接袋75最低点位于底板17下方。
40.当连接推杆73推动弯折板72伸长时,使弯折板72前端向下运动至与地面接触,通过智能清扫车向前运动,将地上前方的宠物粪便铲起,通过连接推杆 73收缩,就弯折板72抬起至宠物粪便所在位置倾斜,由此使粪便在重力作用下掉入承接袋75中,如图5所示。
41.通过设置承接口和承接袋,方便清洁人员直接将承接袋抽出和更换,提高清洁效率。
42.优选的,管口42位于底板17下方并通过吸水管41与底板17固定连接。吸水管41中部设置有过滤器43,过滤器43下端与过滤仓44连接,过滤仓44 设置于底板17上。通过设置过滤仓44,以便及时将过滤仓44取出,并将其中过滤后的垃圾清理掉。
43.水箱45下端设置有重量传感器46,重量传感器46与控制器51电连接。通过重量传感器46监测水箱45的重量变化,当重量超过设定值时,即水箱45中的水需要倒出,由此能够实现智能清扫车的可持续工作。
44.液体检测传感器54至少有四个,且均布于底板17邻近边缘的位置处。以保证覆盖范围。
45.控制部5还包括与控制器51电连接的无线通讯模块52和数据存储器53。通过无线
通讯模块52,以便向远程控制中心进行数据通信,及时发送监测到的信息;通过设置数据存储器53,以便将记录的数据进行长期存储,及记录封闭式小区内环境数据等。
46.优选的,如图6所示,智能清扫车包括相配合的充电桩6,所述充电桩6包括与蓄电池31配合的充电口61和与水箱45相对应的排水口62。智能清扫车外壳1侧壁上开设有与充电口61配合的充电插口和与排水口62配合的排水阀口。
47.在实际使用中,通过液体检测传感器54实时监测与智能清扫车下方的积水情况的具体工作原理为:
48.当有一个液体检测传感器54监测到有积水时,驱动装置向该液体检测传感器54所在方向移动;当有两个液体检测传感器54检测到有积水时,驱动装置向两个液体检测传感器54之间的方向移动;当有三个液体检测传感器54监测到下方有积水时,驱动装置向未检测到积水那个液体检测传感器54的相反方向移动,直到所有液体检测传感器54均监测到积水,然后驱动吸水部4工作,开始吸水。
49.也可以根据需要,设置为当两个或三个液体检测传感器54监测到有积水时即进行吸水,以适应不同环境标准要求。
50.当吸水超过设定量或着蓄电池电量低于设定值时,将智能清扫车移动至充电桩6位置处,进行及时排水或充电,以实现持续工作。
51.上面对本实用新型的具体实施方式进行描述,以便于本技术领域的技术人员理解本实用新型,但应该清楚,本实用新型不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本实用新型的精神和范围内,这些变化是显而易见的,一切利用本实用新型构思的发明创造均在保护之列。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。