1.本发明涉及一种轨道工程机械,用于在捣固过程之后加固轨道的碎石道床,所述轨道工程机械具有在钢轨行走机构上可运行的机械框架和加固机组,所述加固机组包括用于抓握轨道联组的滚轮和用于对轨道联组施加振动的振动发生器。此外,本发明还涉及一种运行轨道工程机械的方法。
背景技术:
2.这种类型的轨道工程机械由文献wo 2006/056215 a1已知。通常,这种机械称为动态轨道加固器(dgs)。已知的轨道工程机械包括加固机组,在捣固过程之后借助加固机组加固轨道。在此规定,轨道联组首先被抬升超出最终的额定位置,然后实施捣固。借助随后的加固过程,轨道联组应下降到期望的额定位置。由于不可预见的情况,在捣固过程中可能过于剧烈地出现超高抬升。之后,借助通常的加固过程所随后实现的下降不足以达到额定位置。在这种情况下需要对碎石道床进行手动的再处理,以便将轨道联组下降到希望的水平。
技术实现要素:
3.本发明所要解决的技术问题是,改进前述类型的轨道工程机械,以便以简单的方式避免轨道出现不希望的超高抬升。此外,本发明所要解决的技术问题还在于提供用于运行轨道工程机械的相应的方法。
4.所述技术问题按照本发明通过权利要求1和9的技术特征解决。从属权利要求提供了本发明的有利的改进方案。
5.在此规定,沿作业方向在所述加固机组的前方在轨道工程机械的两侧的纵向侧面上布置有相应的清除装置,并且各个清除装置分别包括可下降到碎石道床中的清除工具,以便将碎石道碴从相应的轨枕端头区域中移除。通过激活清除装置在轨道联组的两侧在碎石道床内产生沟槽,所述沟槽平行于轨道轴线延伸并且敞露出轨枕端侧面。在这样处理的轨道横截面中,减小了轨道联组的横向位移阻力,由此借助加固机组向轨道联组传递增大的动能。此外,在轨枕端头区域中为那些在加固过程中从轨枕下方侧面转移出的碎石道碴形成留空空间。由此实现了前提条件,以便借助加固机组相对于传统的加固过程使轨道联组更大程度地下降。
6.在各个清洁装置的简单地设计中规定,各个清除工具分别借助伺服驱动装置相对于固持件能够转动。以这种方式,各个清洁工具能够自动地下降到配属的轨枕端头区域内。
7.另外的改进方案规定,各个清除工具分别包括环绕的清除链条。这种清洁工具是非常结实的,其中,单个链节在发生磨损时能够以简单的方式被更换。
8.在此有利的是,各个清除链条分别包括输送器件,以便将碎石道碴输送到上方的输出位置,并且在相应的输出位置的下方布置有存储装置或者另外的输送装置。并非将碎石道碴仅向侧面清除,而是取而代之地收集碎石道碴。被收集的碎石道碴有利地在轨道联组完成下降之后重新被置入轨枕端头区域中。
9.为了可以使处理过程最大程度地自动化,有利的是,所述轨道工程机械包括测量系统,在加固过程中借助测量系统能够测量轨道联组的下降。随之根据当前测取的轨道位置来控制或者说触发加工机组。例如提高振动频率,以便增强碎石道碴的流动特性并且由此加速轨道联组的下降过程。
10.按照本发明的轨道工程机械的扩展方案规定,沿作业方向在机械框架的前方连接有另外的机械单元,并且在所述另外的机械单元上布置有抬升机组和捣固机组。由此涉及一种组合的轨道工程机械,借此在作业过程中实施捣固和加固。在此,本发明是特别有效的,因为在捣固时针对不希望的超高抬升可立即做出反应,而无需中断作业流程。
11.在此有利的是,用于检测轨道高度的另外的测量系统与所述另外的机械单元耦连。例如,在捣固机组的后方的区域中布置有测量车,用于在捣固过程之后检测该结果所实现的轨道位置。以这种方式自动识别不希望的超高抬升。
12.在改进方案中规定,所述另外的测量系统的测量结果被输入至评估装置,并且所述评估装置与用于控制或者说触发清除装置的控制装置耦连。这提高了自动化程度,从而最大程度地在没有操作人员介入的情况下可以运行轨道工程机械。
13.在按照本发明的用于运行轨道工程机械的方法中,在激活过程中,两个清除装置从非运行状态被置于作业状态,其中,在机械行进时借助所述清除装置将碎石道碴从轨枕端头区域移除,并且其中,轨道联组借助加固机组实施振动并且被施加动负荷。所述方法实现了借助加固机组超出惯常尺度地下降轨道联组,以便补充在捣固过程中的不希望的超高抬升。
14.为了所述方法的自动化有利的是,在抬升和捣固过程之后检测轨道的高度位置,并且在超出预设的高度位置时借助控制装置激活清除装置。在此,清洁装置在相应的轨枕端头区域中的下降深度可以根据测得的高度位置实施。在此,轨道联组所需的下降值决定了待清除的碎石道碴的量值。在此也可以有利的是,针对每条钢轨检测自身的高度位置并且区别地控制清除装置。例如在具有较小下降值的侧面将相应的清除装置调节为更小的下降深度。
附图说明
15.以下以示例性的方式参照附图阐述本发明。在附图中:
16.图1示出具有清除装置和加固机组的轨道工程机械的示意图,
17.图2示出具有抬升机组和捣固机组的轨道工程机械的示意图,
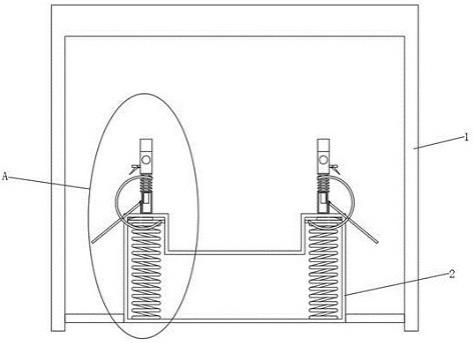
18.图3示出轨道连同清除装置和加固机组的剖视示意图,
19.图4示出加固机组和轨道的俯视示意图。
具体实施方式
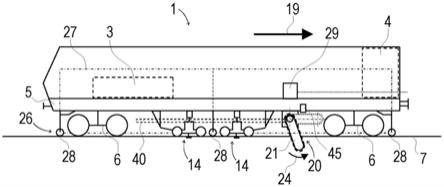
20.按照本发明的轨道工程机械或者设计为独立的加固机械1(图1)或者设计为组合机械,该组合机械具有捣固机械2(图2)和与捣固机械耦连的加固机械1。在独立的加固机械1的情况下,该加固机械具有独立的驱动装置3和独立的驾驶台4。所述轨道工程机械包括机械框架5,所述机械框架能够在轨道7上的钢轨行走机构6上行进。
21.轨道7是碎石道碴轨道,其具有支承在碎石道床8中的轨道联组9。在此,轨道联组9
由轨枕10和固定在轨枕上的钢轨11组成。在轨枕10之间构成所谓的轨枕盒12,并且在轨枕10的端侧旁边存在所谓的轨枕端头区域13。在轨枕盒12和轨枕端头区域13内的夯实的碎石道碴使得轨道联组9在负载下保持位置。除了碎石道碴在轨枕的纵向侧面上的摩擦以外,尤其碎石道碴在轨枕端头区域13内的夯实度决定了轨道7的所谓的横向位移阻力。
22.在图1中示出的轨道工程机械包括两个具有滚轮15的加固机组14,所述滚轮用于固持轨道联组9。在简单情况下,仅布置一个加固机组14。在运行时,每个加固机组14借助振动发生器16实施振动17。通过滚轮15通常将沿轨道横向的水平振动传递至轨道联组9。此外,轨道联组9借助液压缸18可以被施加动负荷,以便加强加固过程效果。
23.沿作业方向19在加固机组14的前方在轨道工程机械的每个纵向侧面上布置有清除装置20。各个清除装置20分别包括清除工具21,所述清除工具在配属的轨枕端头区域13中可以下降到碎石道床8中。各个清除工具21例如剑形地构造有在作业平面22中环绕或者说循环的清除链条23。适宜的是几乎竖直定向的且平行于作业方向19定向的作业平面22。各个清除链条23的环绕方向24如此选择,使得碎石道碴向前且向上被清除走并且存放在侧面。以这种方式在每个轨枕端头区域13中产生沟槽25,轨枕10的相应的端侧在所述沟槽13中露出。利用略微向外倾斜的作业平面22增强地将碎石道碴存放在相应的轨枕端头区域13的外侧。
24.轨道工程机械包括测量系统26,在加固过程中可以借助所述测量系统测量轨道联组9的下降。测量系统26例如包括测量弦27和测量车28。所述测量车28以伸缩轴线被压在钢轨11上并且实现轨道运行。作为用于测量车28相对彼此的位置的参考系而使用测量弦27。也可以使用虚拟的测量弦27和光学的测量装置。
25.测量系统26的测量结果输入至控制装置29,借助控制装置控制加固机组14和液压缸18。例如实现振动频率的改变和/或动负荷的改变,以便影响轨道联组9的下降。尤其在不低于35hz的频率下,碎石道碴表现出流动特性,这种流动特性使得碎石颗粒发生更大的位移。理想情况下选择大约50hz的振动频率,以便实现碎石颗粒的高运动性。在本发明中提高振动频率,使得更多的碎石颗粒从轨枕10下方的区域迁移到通过沟槽25构成的留空空间中。
26.图2示出的机械单元包括抬升机组30、捣固机组31和另外的测量系统32。在组合机械的情况下,该机械单元连接在加固机械1的前方。在捣固过程中,轨道联组9借助抬升机组30被抬升并且通过借助捣固机组31实施的捣固在其位置上被固定。在此,另外的测量系统32包括测量弦27,以便将当前的抬升值以预设的额定值调准。通常,轨道联组9被抬升到轨道7的额定位置之上,以便接下来借助加固机械1下降到额定位置上。
27.有利的是,另外的测量系统32附加地包括测量车33,用于对抬升的轨道7再测量。由此,立即确定不允许的超高抬升。例如,测量结果在评估装置34中与预设的高度位置相比较。评估装置34与用于控制清除装置20的控制控制29相连。以这种方式,一旦在评估装置34中确定不允许的超高抬升,可以自动地激活清除装置20。
28.在图3中在左侧示出处于非运行状态下的清除装置20。在右侧的清除装置20处于工作状态。为了改变状态,相应的清除工具21借助伺服驱动装置35围绕转动轴线36相对于固持件37可以转动。在简单的实施方式中,两个清除装置20通过共同的固持件37和共同的转动装置相耦连。此外适宜的是,清除工具21的位置沿横向可调节地设计,以便调整相对于
轨枕端侧面的距离。为此,相应的清除工具21例如通过导引件和位移驱动装置与固持件37相连。
29.在所示的具有清除链条23的实施方式中布置有链条驱动装置38。可选的是,这些链节装配有输送器件,借助所述输送器件将碎石道碴从相应的轨枕端头区域13输送到上方的输出位置39。在此,在相应的输出位置39的下方布置有存储或输送装置40。通过本发明的改进方案,碎石道碴可以在轨道下降之后再次被置入到相应的轨枕端头区域13中。此外有意义的是,在完成轨道下降之后并且必要时在碎石道碴重新置入之后,对碎石道床横截面进行再处理。为此,轨道工程机械例如包括在加固机组14后方的在两个纵向侧面上可调节的侧面犁。也可以使用单独的侧面成型机械。
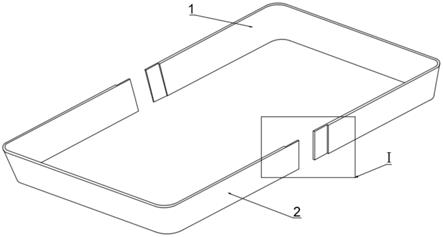
30.在图4中示出在两侧具有沟槽25的第一区域41和在两侧没有沟槽25的第二区域42。按照本发明,在加固机组14保持相同活动性的情况下,在第一区域41中比在第二区域42中形成轨道联组9的更大程度的下降。清除工具21的下降深度43在此决定了所产生的沟槽25的深度。为了确保整个轨枕端侧面被清空,提供明显在轨枕下边缘的下方足够的下降深度43。但是在此应注意的是,绝不能损伤到位于碎石道床8下方的路基层44。
31.可选地布置光学传感器45,所述光学传感器检测清除工具21相对于轨道7的位置并且与控制装置29耦连。由此,除了下降深度43以外,也可以自动地调整清除工具21相对于轨枕10的侧向间距。此外,可以使用用于识别障碍物的传感器,以便自动地实施清除工具21的避让。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。