一种安全的两翼旋转自动门
1.技术领域:
2.本实用新型涉及互联网技术应用领域,尤其涉及一种安全的两翼旋转自动门。
3.
背景技术:
4.两翼自动旋转门是近年来应用较为广泛的一种旋转门,通常由天花板、固定圆筒壁、间隔板、圆弧部组成,通过间隔板、圆弧部的旋转,间或打开入口、丑,进而实现人流的进出。为了保证安全,现有的旋转门大多设置有红外传感器,各个红外传感器能在一定空间范围内探测人体,通过探测结果控制旋转门的停止或者转动,防止出现人体被旋转门夹伤。但是,这种保护形式非常单一,一旦红外防夹感应器不灵敏或探测范围不够或因故障失去作用,行人在圆弧部运行到离固定圆筒壁较近的距离突然进入时,就容易发生夹伤的危险,严重影响人身安全。
5.因此,有必要提供一种可以为行人提供多层次、多种类保护措施的旋转自动门,以最大限度保证安全。
6.
技术实现要素:
7.为达到上述目的,本实用新型提供了一种安全的两翼旋转自动门,包括门体、控制电路、动力系统、传感系统;
8.所述门体包括固定圆筒壁、间隔板、圆弧部、天花板,固定圆筒壁顶部设置有环状板,支撑环状板的为两个侧壁,两个侧壁相对设置之间形成旋转门的入口、出口;间隔板能够绕着天花板垂直方向上的中轴线在圆筒壁所围成区域内进行转动;圆弧部设置于间隔板两端,包括铰接在一起的回弹部分与固定部分,固定部分内壁固定于间隔板侧壁,其一侧的设置有铰接复位装置,回弹部分在未受到外力时与固定部分组成完整弧面,在受力时能够朝固定部分内壁转动,并在作用力消失后复位;
9.所述传感系统包括位于红外传感器、霍尔传感器;固定圆筒壁顶部和/或侧壁下方设置红外传感器;回弹部分顶部设置磁铁,在天花板边缘对应于回弹部分的位置设置霍尔传感器;
10.所述控制电路包括一个控制板,所述控制板与传感部分、动力部分连接;
11.所述动力系统包括电机、控制电机的变频器;所述电机用于驱动旋转门的运动。
12.进一步的,所述传感系统还包括接触传感器,所述接触传感器为固定在入口、出口处门框上的两条垂直、平行的铜条,当两个铜条受挤压而接触在一起时,控制板对应信号输入端子导通。
13.进一步的,所述传感系统还包括光电式旋转编码器,用于探测旋转门的旋转速度。
14.进一步的,还包括触摸显示屏,所述触摸显示屏与控制板连接。
15.进一步的,所述红外传感器设置可设置在入口、出口的左右门框和/或者顶部上。
16.进一步的,还设置有紧急制动按钮,与控制板的信号输入端接通。
17.进一步的,所述铜条由绝缘材料包裹。
18.进一步的,固定部分、回弹部分顺次设置的顺序方向与旋转门通常情况下的旋转方向相同。
19.进一步的,固定部分、回弹部分顺次设置的顺序方向为逆时针方向。
20.本实用新型的有益效果为:
21.1.对现有旋转门的圆弧部进行改良,设置固定部分与回弹部分,有效防止行人被硬性挤压。
22.2.通过设置传感部分,有层次的进行安全控制。
23.本实用新型设计精巧,安全控制措施完备,安全性能远远超过现有旋转门,在保持现有旋转门正常功能的前提下,最大限度的保证了行人人身安全,具有较好的市场应用前景。
24.附图说明:
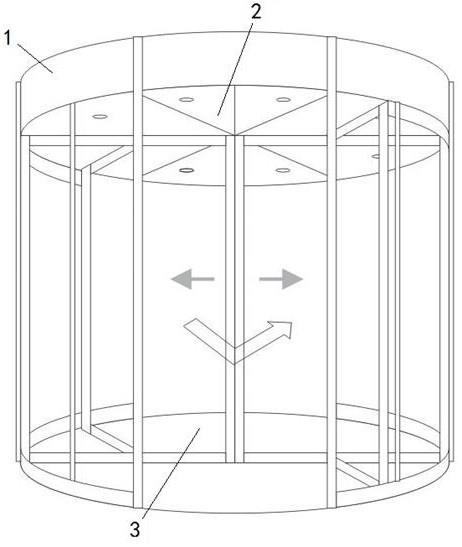
25.图1为本实用新型外观示意图。
26.图2为本实用新型使用状态时的俯视图。
27.其中:1.环状板,2.天花板,3.间隔板,4.固定部分,5.回弹部分。
28.具体实施方式:
29.下面结合图1、2对本实用新型进行详细说明。
30.本实用新型所述的一种安全的两翼旋转自动门,包括门体、控制电路、动力系统、传感系统。
31.一.门体
32.所述门体包括固定圆筒壁、间隔板3、圆弧部、天花板2。
33.固定圆筒壁在垂直方向上分为两个部分:顶部为环状板1,下方为支撑环状板1的两个侧壁。天花板2设置于环状板1所围成区域内,为圆形,环状板1内侧设置有旋转轨道,圆弧部顶部设置有轮子,所述轮子可以沿着旋转轨道运行。
34.两个侧壁相对设置,之间形成旋转门的入口、出口。
35.间隔板3顶部固定于天花板2,中间部分可以向两侧平开,形成通道。所述天花板2、间隔板3能够绕着天花板2垂直方向上的中轴线在圆筒壁所围成区域内进行转动。间隔板3优选用透明材料制作,以方便观察门内外情况。
36.圆弧部设置于间隔板3两端,其由铰接在一起的回弹部分5与固定部分4组成。固定部分4内侧固定于间隔板3侧壁,其一侧设置有铰接复位装置,用于与回弹部分5连接。回弹部分5在未受到外力时与固定部分4组成完整弧面,在受到向内的作用力时,能够朝固定部分4内侧转动,并在作用力消失后复位。
37.应当理解,本文所述的向内是指朝向固定圆筒壁所围成区域内,向外是指朝向固定圆筒壁所围成区域外。
38.应当理解, 固定部分4、回弹部分5设置顺序应该满足固定部分4、回弹部分5顺次设置的顺序方向与旋转门通常情况下的旋转方向相同。实践中,旋转门旋转方向一般为逆时针方向,固定部分4、回弹部分5两者的连线方向也为逆时针。
39.优选的,天花板2上设置有若干照明灯,以达到美观及照明的效果。
40.二.传感系统
41.所述传感部分可包含以下的几个功能:
42.1.通过设置红外传感器检测入口、出口处的人或物,控制旋转门的转动。红外传感器可设置在入口、出口的左右门框或者顶部上。顶部的红外传感器用于检测较高区域,门框
上的红外传感器则检测较低区域,能够满足检测不同身高行人的需求甚至宠物等。
43.2.通过设置霍尔传感器用于感知回弹部分5的位移情况。其具体实现方法为:在回弹部分5上方设置磁铁,在活动圆弧形天花板2边缘对应于回弹部分5的位置设置霍尔传感器,当回弹部分5受力向内转动时,霍尔传感器与磁铁不接触,产生低电平,控制板控制旋转门停止旋转。在本实施例中,霍尔传感器与磁铁的相对位置偏移10mm及以上,就会停止旋转。具体偏移阈值可以根据需要设定。偏移阈值是在安装时设定好,后期一般不用再调整,磁铁位置固定后,阈值就固定了,但若有需要可调整磁铁位置。
44.3.通过设置接触传感器感知是否有人在入口或者出口处有挤压门框现象。具体手段是:在固定圆筒壁的入口、出口处的门框上设置两条垂直、平行的铜条,在人或物撞到门框上时,平行的铜条受挤压而接触,控制板对应信号输入端子导通,发出停止信号,控制电机停止工作。优选的,两条铜条由绝缘材料包覆。
45.接触传感器的设置是优选技术方案。
46.4.通过设置速度检测单元检测旋转门的旋转速度,根据速度变化判断旋转受阻情况,进而控制电机的动作。速度检测单元一般为光电式旋转编码器。
[0047] 根据速度变化判断旋转受阻情况,进而控制电机的动作是优选技术方案。
[0048]
三、动力系统
[0049]
动力部分为一个电机,及与电机连接的变频器。所述变频器与控制板连接,用于接收控制信号,进而控制电机的运动。电机为旋转门的动力来源。
[0050]
四、控制电路
[0051]
控制电路包括一个控制板(如plc控制板),所述控制板与传感部分、动力部分连接。本处设置控制板是提供了一个供操作人员烧录旋转门运行控制程序的硬件平台,通过该平台,操作人员可以设置工作模式及动力控制方法。
[0052]
在本实施例中,工作模式的选择是根据用户输入操作信息来确定,通过与控制板连接的显示屏及键盘,或者触摸显示屏实现信号输入。
[0053]
在本实施例中,动力控制方法是控制板根据传感器部分的信息采集情况来控制旋转门动作。
[0054]
下面以一个朝入口走来的人为例,对利用本实用新型可实现的某种安全控制流程进行举例说明。
[0055]
首先设置于高处的红外传感器和设置于低处的红外传感器持续检测,当人体靠近门框时,会停止转动,防止人突然冲入圆弧部与侧壁之间。如果红外传感器失灵或者未检测到人体,则进行下一步。
[0056]
人体强行进入圆弧部(不区分固定部分4与回弹部分5)与门框之间,很可能首先会触碰到铜条,两条铜条接通,控制板对应信号输入端子导通,发出停止信号,变频器控制电机停止运转。如果此步未能进行或者相关零部件失灵,则进行下一步。
[0057]
人体进入回弹部分5与固定圆筒壁之间,对回弹部分5施加一个向内的挤压力,回弹部分5绕着铰接复位装置向内转动,霍尔传感器与磁铁相对位置偏移,控制板控制电机停止工作并刹车制动。如果此步未能进行或者相关零部件失灵,则进行下一步。
[0058]
外部人员或该通行人员碰撞挤压等对圆弧部施加一个阻力,如果是启动阶段,将使得旋转速度不能达到检测时间点对应的速度,如果是稳定运行阶段,将使得旋转速度小
于阈值,控制板控制电机停止工作并刹车制动。
[0059]
因此,对上述控制流程进行概括,得到本实用新型危险情况下的安全控制流程:
[0060]
步骤一:红外传感器持续工作,当人体靠近门框时,如果被检测到,则旋转门停止转动,否则进行下一步;
[0061]
步骤二:人体强行进入圆弧部分与门框之间,如挤压到铜条,则旋转门停止转动,否则进行下一步;
[0062]
步骤三:人体进入回弹部分5与固定圆筒壁之间,回弹部分5向内转动,霍尔传感器与磁铁相对位置偏移,旋转门停止转动,如果未停止转动,则进行步骤四;
[0063]
步骤四:根据速度传感器的检测值判断旋转门是否应该停止旋转,如是,则旋转门停止转动,否则继续转动。
[0064]
优选的,本实用新型还设置有紧急制动按钮,用于紧急控制旋转门停止旋转。档设置此按钮时,安全控制流程还应当包括紧急制动步骤。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
