1.本发明涉及一种用于将煮的面填充到容器中的面接收装置。
背景技术:
2.由于少子高龄化、核心家庭化、个体饮食化、孤餐化等各种因素导致的生活方式的变化,开发出了方便食用的乌冬面、荞麦面、拉面等烹调面,并将其摆在店里。
3.在这些烹调面的制造现场,由于要应对短时间的商品切换或多品种,自动化较困难,因此煮的面主要通过人工填充到食品托盘等容器中。但是,在这些烹调面的制造现场,也由于劳动人口的减少而陷入慢性的劳动力不足,期望实现自动化。
4.例如,在专利文献1中,公开了使投入了煮的面的接收盘进行自转动作的同时喷雾疏松剂,将从接收盘排出的煮的面经由面接收导向装置填充到容器中的煮的面的疏松装置(面接收装置)。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开2003
‑
9795号公报
技术实现要素:
8.发明要解决的课题
9.但是,使用专利文献1记载的疏松装置将煮的面填充到容器中时,面从容器溢出,溢出的面必须由人修正,不能实现省力化、省人化。另外,根据商品不同,容器的形状、装煮的面的区域等也不同,因此,需要在每个容器所规定的区域内填充煮的面,但在上述的疏松装置中,难以正确且可靠地将煮的面供给到容器所规定的区域。
10.本发明的目的在于提供一种能够将煮的面正确且可靠地填充到容器中的面接收装置。
11.用于解决课题的方案
12.本发明的面接收装置是将煮的面填充到容器内的面接收装置,该面接收装置的特征在于,具备:碗,其收容所述煮的面;漏斗,其具有将位于所述碗内的所述煮的面投入的投入口以及将所述煮的面排出到所述容器的排出口;输送部,其将所述容器输送到所述排出口的下方;移动部,其使所述漏斗在碗与所述输送部之间移动;控制部,在由所述输送部将所述容器输送到所述排出口的下方之后使所述漏斗下降,在将所述煮的面填充到所述容器中之后使所述漏斗上升,使所述输送部在从所述漏斗下降直到上升的期间停止所述容器的输送,在所述漏斗上升之后再次开始所述容器的输送。
13.另外,本发明的面接收装置的特征在于,具备喷射部,该喷射部在从将所述煮的面填充到所述容器中直到使所述漏斗上升的期间,从所述投入口朝向所述排出口将空气喷射到所述漏斗的内壁面。
14.另外,本发明的面接收装置具备的所述控制部的特征在于,为了使所述漏斗下降
的时机,具备对所述煮的面被投入到所述碗中进行检测的面投入检测部。
15.另外,本发明的面接收装置的特征在于,具备:容器供给部,其将所述容器供给到所述输送部;容器检测部,其对所述容器从所述容器供给部被供给到所述输送部进行检测。
16.另外,本发明的面接收装置的漏斗的特征在于,下降到所述排出口位于所述容器内为止,上升到所述排出口位于比所述容器的上缘更靠上方为止。
17.发明效果
18.根据本发明,能够提供一种能够将煮的面正确且可靠地填充到容器中的面接收装置。
附图说明
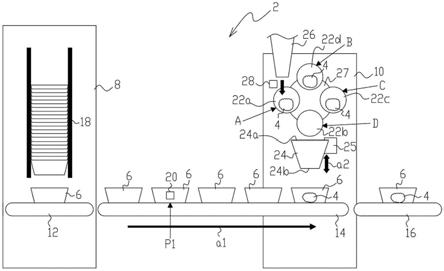
19.图1是示出实施方式的面接收装置的概略结构的图。
20.图2是示出实施方式的面接收装置的系统结构的框图。
21.图3是用于说明向实施方式的漏斗的内壁面的空气喷射的图。
22.图4是用于说明使用实施方式的面接收装置将第一份煮的面填充到第一个托盘时的处理的流程图。
23.图5是示出实施方式的面接收装置的初始待机状态的图。
24.图6是示出实施方式的面接收装置的从初始待机状态到一次点动后的状态的图。
25.图7是示出实施方式的面接收装置的从初始待机状态到二次点动后的状态的图。
26.图8是示出实施方式的面接收装置的从初始待机状态到三次点动后的状态的图。
27.图9是用于说明使用实施方式的面接收装置将第n份煮的面填充到第n个托盘时的处理的图。
具体实施方式
28.以下,参照附图,对本发明的实施方式的面接收装置进行说明。图1是示出实施方式的面接收装置的概略结构的图。该实施方式的面接收装置2是用于将乌冬面、荞麦面以及拉面等经烹调的煮的面4填充到托盘(容器)6中的装置,如图1所示,具备托盘供给机8、喷雾装置10、上游侧传送带12、面接收传送带14以及下游侧传送带16。
29.托盘供给机8是经由上游侧传送带12将托盘6供给到面接收传送带14的托盘供给部,具备收容托盘6的收容部18。托盘供给机8将收容在收容部18中的托盘6供给到上游侧传送带12。上游侧传送带12使从托盘供给机8供给的托盘6向图1所示的箭头a1的方向移动而输送,传送到面接收传送带14。
30.面接收传送带14是使从上游侧传送带12传送来的托盘6向图1所示的箭头a1方向移动而输送到喷雾装置10的例如两条带式传送带(输送部),将托盘6输送到喷雾装置10具备的漏斗24的排出口24b(参照图1)的下方。另外,面接收传带14在喷雾装置10中在托盘6内填充了煮的面4之后,使托盘6向箭头a1方向移动而输送,传送到下游侧传送带16。面接收传送带14通过重复短时间的驱动和停止的点动动作而移动。下游侧传送带16使从面接收传送带14传送来的托盘6向图1所示的箭头a1的方向移动。
31.喷雾装置10具有四个碗22a~22d以及漏斗24。四个碗22a~22d的每一个是碗状的碗,从煮的面投入口26将收容煮的面4的开口部朝上,以90度间隔安装在旋转盘27的周缘
部。旋转盘27构成为能够以旋转盘27的中心为轴顺时针间歇旋转90度。四个碗22a~22d通过旋转盘27的间歇旋转而定位于四个位置a~d中的某一个。在图1中,图示了第一碗22a定位在第一位置a、第二碗22b定位在第四位置d、第三碗22c定位在第三位置c、第四碗22d定位在第二位置b的状态。另外,碗22a~22d的每一个构成为能够以与旋转盘27的盘面正交的方向为轴进行自转。进而,碗22a~22d的每一个构成为,在定位在第四位置d时,以水平方向为轴进行反转。
32.煮的面4从煮的面投入口26投入到定位在第一位置a的碗(在图1中为第一碗22a),疏松液喷雾到第一碗22a内的煮的面4。疏松液例如是水溶性大豆多糖类或色拉油,防止煮的面4成为丸子状。第一碗22a内的煮的面4通过第一碗22a的自转被搅拌,因此喷雾到第一碗22a内的疏松液均匀地附着在煮的面4上。需要说明的是,根据煮的面的不同,也有不使用疏松液的。
33.疏松液喷雾到定位在第二位置b以及第三位置c的碗(在图1中为第四碗22d以及第三碗22c)内的煮的面4。第四碗22d以及第三碗22c内的煮的面4通过第四碗22d以及第三碗22c的自转而被搅拌,因此喷雾到第四碗22d以及第三碗22c内的疏松液均匀地附着在煮的面4上。
34.定位在第四位置d的碗(在图1中为第二碗22b)以开口部朝下的方式以水平方向为轴进行反转,第二碗22b内的煮的面4被投入到漏斗24中。
35.需要说明的是,当疏松液喷雾到定位在第一位置a的第一碗22a内时(当疏松液喷雾到定位在第二位置b以及第三位置c的第四碗22d以及第三碗22c内,定位在第四位置d的第二碗22b内的煮的面4被排出时),旋转盘27顺时针旋转90度。即,第一碗22a移动到第二位置b,第四碗22d移动到第三位置c,第三碗22c移动到第四位置d,第二碗22b移动到第一位置a。
36.漏斗24为倒圆锥台形筒状,具有将定位在第四位置d的碗(图1中为第二碗22b)内的煮的面4投入的投入口24a以及将煮的面4排出到托盘6上的排出口24b。漏斗24与移动部25连接,移动部25使漏斗24在第二碗22b和面接收传送带14之间、即图1所示的箭头a2方向上移动。漏斗24配置为,在等待从定位在第四位置d的第二碗22b排出煮的面4的待机状态时,位于图1所示的位置、即排出口24b位于比托盘6的上缘更靠上方。漏斗24在即将从定位在第四位置d的第二碗22b排出煮的面4之前且通过面接收传送带14将托盘6输送到排出口24b的下方之后,下降到排出口24b位于托盘6内(参照图9)。而且,在煮的面4从投入口24a投入并从排出口24b排出之后,漏斗24上升到排出口24b位于比托盘6的上缘更靠上方(图1所示的位置)。
37.图2是示出该实施方式的面接收装置2的系统结构的框图。如图2所示,面接收装置2具备控制部30。控制部30统一地控制面接收装置2的各部分,特别是控制漏斗24的移动,该漏斗24在定位在第四位置d的碗(在图1中为第二碗22b)和面接收传送带14之间移动。在控制部30上,连接有托盘供给部32、托盘检测传感器20、传送带驱动部34、面投入检测传感器28、公转驱动部36、第一自转驱动部38、第二自转驱动部40、第三自转驱动部42、第四自转驱动部44、第一疏松液喷雾部46、第二疏松液喷雾部48、第三疏松液喷雾部50、漏斗驱动部60以及空气喷射部62。
38.托盘供给部32将在托盘供给机8的托盘收容部18中收容的托盘6一个一个地以规
定间隔供给到上游侧传送带12上。控制部30通过控制托盘供给部32而使托盘供给机8工作。如图1所示,托盘检测传感器20设置在面接收传送带14的输送路径附近,对托盘6从托盘供给机8供给到面接收传送带14进行检测。即,托盘检测传感器20检测托盘6是否位于面接收传送带14上的位置p1。控制部30取得来自托盘检测传感器20的检测结果,基于取得的检测结果控制使漏斗24下降的距离。
39.传送带驱动部34控制面接收传送带14的驱动。控制部30通过控制传送带驱动部34来驱动面接收传送带14。即,控制部30通过控制传送带驱动部34,在从漏斗24下降直到上升的期间,停止面接收传送带14的驱动,从而停止托盘6的输送,在漏斗24上升之后,驱动面接收传送带14,从而重新开始托盘6的输送。同样地,控制部30通过控制未图示的上游侧传送带驱动部以及下游侧传送带驱动部,分别驱动上游侧传送带12以及下游侧传送带16。
40.如图1所示,面投入检测传感器28设置在煮的面供给口26的附近,为了使漏斗24下降的时机,对煮的面4被投入到定位在第一位置a的碗中进行检测。即,面投入检测传感器28检测是否从煮的面供给口26对喷雾装置10供给了煮的面4。控制部30取得来自面投入检测传感器28的检测结果,基于取得的检测结果控制使漏斗24下降的时机。
41.公转驱动部36控制旋转盘27的旋转。控制部30通过控制公转驱动部36使旋转盘27间歇旋转。第一自转驱动部38控制第一碗22a的旋转(自转)。同样地,第二自转驱动部40、第三自转驱动部42以及第四自转驱动部44分别控制第二碗22b、第三碗22c以及第四碗22d各自的旋转(自转)。控制部30通过分别控制第一自转驱动部38、第二自转驱动部40、第三自转驱动部42以及第四自转驱动部44,使第一碗22a、第二碗22b、第三碗22c以及第四碗22d分别自转。
42.第一疏松液喷雾部46将疏松液喷雾到定位在第一位置a的碗(在图1中为第一碗22a)内。同样地,第二疏松液喷雾部48以及第三疏松液喷雾部50分别将疏松液喷雾到分别定位在第二位置b以及第三位置c的碗(在图1中为第四碗22d以及第三碗22c)内。控制部30通过分别控制第一疏松液喷雾部46、第二疏松液喷雾部48以及第三疏松液喷雾部50,将煮的面4投入到第一碗22a、第四碗22d以及第三碗22c(定位在第一位置a、第二位置b以及第三位置c的碗)内之后,对煮的面4分别喷雾疏松液。
43.漏斗驱动部60控制移动部25的驱动。控制部30通过控制漏斗驱动部60使漏斗24沿上下方向(图1所示的箭头a2的方向)移动。即,控制部30通过控制漏斗驱动部60,在由面接收传送带14将托盘6输送到漏斗24的排出口24b的下方之后使漏斗24下降,在经由漏斗24将煮的面4填充到托盘6中之后使漏斗24上升。
44.如图3的箭头所示,空气喷射部62从漏斗24的投入口24a朝向排出口24b将空气喷射到漏斗24的内壁面。控制部30通过控制空气喷射部62,在从将煮的面4填充到托盘6中直到使漏斗24上升的期间,使空气喷射。空气喷射强度、喷射时间以及喷射次数被预先设定,使得能够从排出口24b可靠地排出残留在漏斗24的内壁面的煮的面4,且收容在托盘6内的煮的面4不会因空气喷射而溢出。
45.接着,参照附图,对使用该实施方式的面接收装置2将煮的面4填充到托盘6中的方法进行说明。图4是用于说明面接收装置2的控制部30为了将第一份煮的面4a填充到第一个托盘6a中而执行的处理的流程图。
46.首先,控制部30以成为图5所示的初始待机状态的方式,使托盘供给机8、上游侧传
送带12以及面接收传送带14工作。即,控制部30对未图示的上游侧传送带驱动部以及传送带驱动部34输出控制信号,使上游侧传送带12以及面接收传送带14驱动。然后,控制部30指示托盘供给部32将收容在托盘供给机8的托盘收容部18的最下方的托盘6a供给到上游侧传送带12上,使托盘6a供给到上游侧传送带12上(步骤s1)。需要说明的是,控制部30对托盘供给部32以预先设定的间隔输出控制信号,如图5所示,托盘供给部32将托盘6b、6c
……
依次供给到上游侧传送带12上。
47.接着,控制部30在由托盘检测传感器20检测到托盘6a位于位置p1的检测结果时(步骤s2),暂时停止上游侧传送带12以及面接收传送带14的驱动,直到由面投入检测传感器28检测到投入了煮的面4a为止。具体而言,控制部30对未图示的上游侧传送带驱动部以及传送带驱动部34输出控制信号,使上游侧传送带12以及面接收传送带14停止。然后,控制部30基于托盘检测传感器20的检测结果,决定三个间距的前方、即托盘6a被定位在漏斗24的下方时的漏斗24的下降距离(步骤s3)。
48.需要说明的是,漏斗24的下降距离由托盘检测传感器20基于托盘6是否处于位置p1来决定。面接收装置2在由面投入检测传感器28检测到投入了煮的面4时,即使在托盘6不处于位置p1的情况下,喷雾装置10以及面接收传送带14也开始点动动作。因此,即使在由于某种事故而没有从托盘供给机8供给托盘6,由托盘检测传感器20检测到托盘6不处于位置p1的情况下,当从煮的面供给口26供给煮的面4时,喷雾装置10以及面接收传送带14也动作。因此,控制部30在由托盘检测传感器20检测到托盘6不处于位置p1的情况下,设定下降距离,以使漏斗24的排出口24b下降到能够可靠地将面落下到作为两条带式传送带的面接收传送带14的带之间的位置。通过使排出口24b下降到面接收传送带14的下侧,可靠地回收从排出口24b排出的煮的面4,防止在面接收传送带14上残留煮的面4。
49.另一方面,控制部30在由托盘检测传感器20检测到托盘6处于位置p1的情况下,以漏斗24的排出口24b位于托盘6内(排出口24b比托盘6的上缘更靠下侧)的方式设定下降距离。需要说明的是,在该实施方式中,作为收容煮的面4的容器,以具有矩形收容口的托盘6为例进行了说明,但也可以是托盘6以外的收容煮的面4的容器,例如盖浇饭型的容器。漏斗24的下降距离根据容器的形状(收容煮的面4的区域或容器的深度等)预先设定,存储在未图示的存储部等中。控制部30从存储部等读出与容器对应的漏斗24的下降距离,并决定。
50.在图5所示的初始待机状态中,控制部30取得基于面投入检测传感器28的检测结果,判别煮的面4a是否已投入到第一碗22a中(步骤s4)。当煮的面4a被投入到第一碗22a中时(步骤s4,是),控制部30对第一疏松液喷雾部46输出控制信号,使疏松液喷雾到位于第一碗22a内的煮的面4a上(步骤s5)。然后,控制部30对公转驱动部36输出控制信号,以成为如图6所示的状态的方式,通过使旋转盘27顺时针旋转90度,使第一碗22a从第一位置a移动到第二位置b(步骤s6)。
51.需要说明的是,第一自转驱动部38通过控制部30的控制始终使第一碗22a自转,因此煮的面4a以及疏松液通过第一碗22a的自转被搅拌,疏松液均匀地附着在煮的面4a上。同样地,第二自转驱动部39使第二碗22b、第三自转驱动部40使第三碗22c、第四自转驱动部41使第四碗22d根据控制部30的控制始终自转。
52.另外,当煮的面4a被投入到第一碗22a中时(步骤s4,是),控制部30与步骤s5以及步骤s6的处理同时,再次开始上游侧传送带12以及面接收传送带14的驱动,如图6所示,使
托盘6a从位置p1向位置p2移动(步骤s7)。另外,控制部30在使上游侧传送带12以及面接传送带14的驱动再次开始的同时,对未图示的下游侧传送带驱动部输出控制信号,使下游侧传送带16驱动。
53.接着,控制部30取得基于面投入检测传感器28的检测结果,判别煮的面4b是否已投入到第二碗22b中(步骤s8)。当煮的面4b被投入到第二碗22b中时(步骤s8,是),控制部30对第二疏松液喷雾部47输出控制信号,使疏松液喷雾到位于第一碗22a内的煮的面4a上(步骤s9)。然后,控制部30对公转驱动部36输出控制信号,以成为如图7所示的状态的方式,通过使旋转盘27顺时针旋转90度,使第一碗22a从第二位置b移动到第三位置c(步骤s10)。第一自转驱动部38始终使第一碗22a自转,因此煮的面4a以及疏松液通过第一碗22a的自转被搅拌,疏松液均匀地附着在煮的面4a上。
54.另外,当煮的面4b被投入到第二碗22b中时(步骤s8,是),控制部30与步骤s9以及步骤s10的处理同时,使托盘6a从位置p2向位置p3移动(步骤s11)。
55.接着,控制部30取得基于面投入检测传感器28的检测结果,判别煮的面4c是否已投入到第三碗22c中(步骤s12)。当煮的面4c被投入到第三碗22c中时(步骤s12,是),控制部30对第三疏松液喷雾部48输出控制信号,使疏松液喷雾到位于第一碗22a内的煮的面4a上(步骤s13)。然后,控制部30对公转驱动部36输出控制信号,以成为如图8所示的状态的方式,通过使旋转盘27顺时针旋转90度,使第一碗22a从第三位置c移动到第四位置d(步骤s14)。第一自转驱动部38始终使第一碗22a自转,因此煮的面4a以及疏松液通过第一碗22a的自转被搅拌,疏松液均匀地附着在煮的面4a上。
56.另外,当煮的面4c被投入到第三碗22c中时(步骤s12,是),控制部30与步骤s13以及步骤s14的处理同时,使托盘6a从位置p3向位置p4移动(步骤s15)。
57.接着,控制部30对漏斗驱动部60输出控制信号,经由移动部25使漏斗24下降在步骤s3中决定的下降距离的量(步骤s16)。第一碗22a在通过步骤s14的处理被定位在第四位置d的时刻,以开口部从上向下的方式以水平方向为轴进行反转,第一碗22a内的煮的面4a从投入口24a被投入到漏斗24中。煮的面4a从漏斗24的排出口24b排出,填充到托盘6内。控制部30对空气喷射部62输出控制信号,如图3所示,使空气喷射到漏斗24的内壁面(步骤s18),使残留在漏斗24内的煮的面4a排出。然后,控制部30对漏斗驱动部62输出控制信号,经由移动部25使漏斗24上升(步骤s19)。
58.接着,控制部30取得基于面投入检测传感器28的检测结果,判别煮的面4d是否已投入到第四碗22d中(步骤s20)。当煮的面4d被投入到第四碗22d中时(步骤s20,是),控制部30对公转驱动部36输出控制信号,使旋转盘27顺时针旋转90度,由此使第一碗22a从第四位置d移动到第一位置a(步骤s21)。另外,控制部30使托盘6a从位置p4(面接收传送带14)向下游侧传送带16输送(步骤s22)。
59.需要说明的是,对控制部30为了将第一份煮的面4a填充到第一个托盘6a中而执行的处理进行了说明,但控制部30与这些处理同时,重复同样的处理,用于每隔一个间距(每次煮的面4从煮的面投入口26投入)将第二份以后的煮的面4b、4c、4d
……
填充到第二个以后的托盘6b、6c、6d
……
中。
60.即,如图9所示,从第(n 2)份煮的面4
n 2
投入到喷雾装置2开始到未图示的第(n 3)份煮的面4
n 3
投入到喷雾装置2为止的期间(n为1以上的自然数),控制部30对第n份煮的面
4n执行图4所示的步骤s13、s14、s16~s19的处理,对第n个托盘6n执行图4所示的步骤s15的处理。
61.同时,如图9所示,控制部30对第(n 5)个托盘6
n 5
进行图4所示的步骤s1的处理,对第(n 3)个托盘6
n 3
执行图4所示的步骤s2~s3的处理。另外,同时,控制部30对第(n 2)份煮的面4
n 2
执行图4所示的步骤s5、s6的处理,对第(n 2)个托盘6
n 2
执行图4所示的步骤s7的处理。进一步地,同时,控制部30对第(n 1)份煮的面4
n 1
执行图4所示的步骤s9、s10的处理,对第(n 1)个托盘6
n 1
执行图4所示的步骤s11的处理。然后,依次重复上述的处理。
62.根据本实施方式的面接收装置2,漏斗24构成为可上下移动,因此能够将煮的面4正确且可靠地填充到托盘6中。即,托盘6配置在漏斗24的下方之后,使漏斗24下降到排出口24b位于托盘6中,然后将煮的面4投入到漏斗24的投入口24a,因此能够防止煮的面4从托盘6溢出。另外,即使在托盘6内设置有与收容煮的面4的区域不同的放置面杯的区域或收容佐料的区域的情况下,也能够防止煮的面4流入收容煮的面4的区域以外的区域。另外,煮的面4填充到托盘6中之后,漏斗24上升,因此托盘6在面接收传送带14上移动时,漏斗24和托盘6不接触。
63.另外,根据本实施方式的面接收装置2,煮的面4投入到漏斗24中之后,将空气喷射到漏斗24的内壁面,因此能够将没有在漏斗24内滑落而残留的煮的面4可靠地填充到托盘6中。因此,能够消除在将煮的面4填充到托盘6中的处理的自动化时成为问题的来自托盘6的煮的面4的溢出,能够实现省力化、省人化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。