1.本实用新型涉及自动化设备技术领域,特别涉及一种加工筝码的设备。
背景技术:
2.古筝又名"秦筝",属于弦乐器,木制长形。唐宋时有弦十三根,后增至十六根,十八弦,二十一弦,二十五弦等,目前最常用的规格为21弦,通常古筝的型号前用s163
‑
21,s代表s形岳山,是筝父徐振高发明,163代表古筝长度是163厘米,21代表古筝弦数21根。自秦、汉以来从我国西北地区逐渐流传到全国各地,逐渐形成了各具浓郁地方特色的流派。
3.筝码做为古筝上的零部件之一,其具有多个加工面,且目前筝码加工通常采用人工方式进行加工,这种方式加工效率低,尺寸准确率低,不易新人上手,报废率高,加工成本高。
技术实现要素:
4.(一)要解决的技术问题
5.为解决上述问题,本实用新型提出了一种自动化加工筝码的设备。
6.(二)技术方案
7.本实用新型的一种加工筝码的设备,包括机箱、工作台和脚轮,所述的机箱下端装有脚轮,所述的机箱上端装有工作台,所述的工作台上设置有进料机构、上下切削机构、切小圆机构和切大圆机构,所述的进料机构包括传送带电机、同步轮和传送带,所述的传送带末端上方装有第一机械爪,该第一机械爪通过机械爪移动块安装于机械爪安装板上,所述的机械爪安装板后端装有横向滑块,该横向滑块通过第一导轨装于安装架上,所述的上下切削机构包括u型铣刀机构和v型铣刀机构,该u型铣刀机构和v型铣刀机构分别装于滑动块上,该滑动块连接有独立气缸,所述的u型铣刀机构和v型铣刀机构上下两端分别装有上限行程螺钉和下限行程螺钉,且该u型铣刀机构和v型铣刀机构中间装有第一移动板,所述的第一移动板一侧装有第一驱动气缸,该第一移动板上方装有第一压紧气缸,所述的第一压紧气缸前端装有第一压紧块,所述的切小圆机构包括小圆铣刀机构,所述的小圆铣刀机构包括刀头部分和驱动部分,所述的刀头部分上方装有第二机械爪,所述的第二机械爪装于第一旋转块内,所述的小圆铣刀机构对面依次装有第二驱动气缸、第二移动板、第二压紧气缸和第二压紧块,所述的切大圆机构包括大圆铣刀机构,所述的大圆铣刀机构包括刀头部分和驱动部分,所述的刀头部分上方装有第三机械爪,所述的第三机械爪装于第二旋转块内,所述的大圆铣刀机构对面依次装有第三驱动气缸、第三移动板、第三压紧气缸和第三压紧块。
8.进一步地,所述的传送带电机输出端齿轮与同步轮输出端齿轮之间通过同步带连接,实现传送带自动输送物料。
9.进一步地,所述的安装架上装有多个机械爪安装板、第一机械爪、第二机械爪和第三机械爪,且安装架两端设有限位块。
10.进一步地,所述的第一驱动气缸、第二驱动气缸和第三驱动气缸分别与第一移动板、第二移动板和第三移动板之间装有感应器,所述的第一移动板、第二移动板和第三移动板分别与上下切削机构、切小圆机构和切大圆机构之间装有感应器,用于进行下一步工作。
11.进一步地,所述的小圆铣刀机构和大圆铣刀机构左侧装有感应器和限位器,右侧装有感应器,用于控制小圆铣刀机构和大圆铣刀机构的移动行程。
12.进一步地,所述的小圆铣刀机构下方装有第一滑块、第二导轨,所述大圆铣刀机构下方装有第二滑块、第三导轨,用于控制小圆铣刀机构和大圆铣刀机构进行左右移动。
13.进一步地,所述的机械爪安装板顶端装有限位螺钉,用于控制机械爪安装板的运动行程。
14.进一步地,所述的第二旋转块和第三旋转块一端开有槽,该槽内装有第二机械爪和第三机械爪,实现同步旋转。
15.进一步地,所述的第一机械爪、第二机械爪、第三机械爪、机械爪移动块、机械爪安装板和安装架组成移载机构,实现自动化夹取。
16.(三)有益效果
17.本实用新型与现有技术相比较,其具有以下有益效果:本实用新型能自动化加工,提高生产效率,降低生产成本。
附图说明
18.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
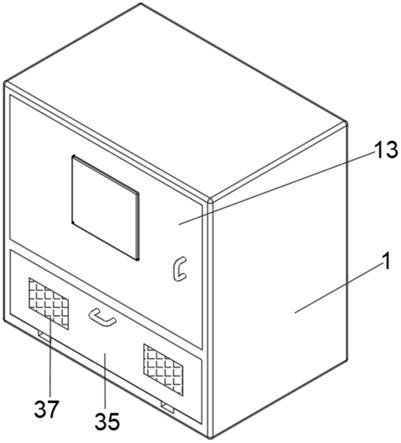
19.图1是本实用新型一种加工筝码的设备的立体结构示意图。
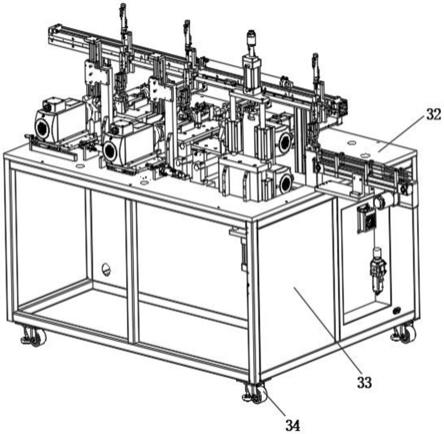
20.图2是本实用新型一种加工筝码的设备的俯视图。
21.图3是本实用新型一种加工筝码的设备的进料机构和上下切削机构的结构示意图。
22.图4是本实用新型一种加工筝码的设备的u型铣刀机构和v型铣刀机构的结构示意图。
23.图5是本实用新型一种加工筝码的设备的切小圆机构的结构示意图。
24.图6是本实用新型一种加工筝码的设备的切大圆机构的结构示意图。
25.1、传送带电机,2、同步轮,3、传送带,4、第一机械爪,5、机械爪移动块,6、横向滑块,7、限位块,8、机械爪安装板,9、上限行程螺钉,10、下限行程螺钉,11、滑动块,12、u型铣刀机构,13、v 型铣刀机构,14、第一压紧块,15、第一压紧气缸,16、移动板滑块,17、小圆铣刀机构,18、第一导轨, 19、第一滑块,20、第一移动板,21、第一驱动气缸,23、第一旋转块,24、大圆铣刀机构,26、进料机构,27、上下切削机构,28、切小圆机构,29、切大圆机构,30、感应器,31、限位器,32、工作台, 33、机箱,34、脚轮,35、安装架,36、第二压紧块,37、第二压紧气缸,38、第二驱动气缸,39、第二移动板,40、第二旋转块,41、第三压紧块,42、第三压紧气缸,43、第三驱动气缸,44、第三移动板, 45、第二机械爪,46、第三机械爪,47、第二导轨,48、第三导轨,49、第二滑块。
具体实施方式
26.如附图所示的一种加工筝码的设备,包括机箱33、工作台32和脚轮34,所述的机箱33下端装有脚轮34,所述的机箱33上端装有工作台32,所述的工作台32上设置有进料机构26、上下切削机构27、切小圆机构28和切大圆机构29。当物料输送至传送带3上时,通过传送带3电机1和同步轮2的配合,将物料送至传送带3尾端。第一机械爪4下降至机械爪安装板8的限位螺钉最大行程时,第一机械爪4松开并且夹紧物料,上升回限位螺钉起始位置并向左移动将物料放置于上下切削机构27对面的第一压紧块14 前,第一压紧气缸15将第一压紧块14及物料压牢。第一驱动气缸21推动第一移动板20向前移动,触及前方感应器30时,u型铣刀机构12和v型铣刀机构13分别下降和上升对物料进行加工。完成时,第一移动板20向后退回,触发后方感应器30,机械爪下降将物料夹取并放置于切小圆机构28上。物料放置于第二压紧块36前,第二压紧气缸37将第二压紧块36及物料压牢。第二驱动气缸38推动第二移动板39向前移动,触及前方感应器30时,小圆铣刀机构17向物料推进加工,移动至限位器31时,小圆铣刀机构 17推出,同时物料上方的第二机械爪45下降,夹取物料并经由第一旋转块23旋转,将物料换面后重新置于第二压紧块36前端,小圆铣刀机构17再次推进加工,加工结束后,小圆铣刀机构17推出,第二机械爪45下降将物料夹取并送至切大圆机构29对面的第三压紧块41前,第三压紧气缸42将第三压紧块41 及物料压牢,第三驱动气缸43推动第三移动板44向前移动,触及前方感应器30时,大圆铣刀机构24向物料推进加工,移动至限位器31时,大圆铣刀机构24推出,同时物料上方的第三机械爪46下降,夹取物料并经由第二旋转块40旋转,将物料换面后重新置于第三压紧块41前端,大圆铣刀机构24再次推进加工。加工结束后,小圆铣刀机构17推出,第三机械爪46下降将物料夹取并送至成料储存箱。
27.其中,所述的传送带3电机1输出端齿轮与同步轮2输出端齿轮之间通过同步带连接。
28.所述的安装架35上装有多个机械爪安装板8、第一机械爪4、第二机械爪45和第三机械爪46,且安装架35两端设有限位块7。
29.所述的第一驱动气缸21、第二驱动气缸38和第三驱动气缸43分别与第一移动板20、第二移动板 39和第三移动板44之间装有感应器30,所述的第一移动板20、第二移动板39和第三移动板44分别与上下切削机构27、切小圆机构28和切大圆机构29之间装有感应器30,用于进行下一步工作。
30.所述的小圆铣刀机构17和大圆铣刀机构24左侧装有感应器30和限位器31,右侧装有感应器30。
31.所述的小圆铣刀机构17下方装有第一滑块19、第二导轨47,所述大圆铣刀机构24下方装有第二滑块49、第三导轨48。
32.所述的机械爪安装板8顶端装有限位螺钉。
33.所述的第二旋转块40和第三旋转块一端开有槽,该槽内装有第二机械爪45和第三机械爪46,实现同步旋转。
34.所述的第一机械爪4、第二机械爪45、第三机械爪46、机械爪移动块5、机械爪安装板8和安装架 35组成移载机构,实现自动化夹取。
35.本实用新型能自动化加工,提高生产效率,降低生产成本。
36.1、上面所述的实施例仅仅是对本实用新型的优选实施方式进行描述,并非对本实
用新型的构思和范围进行限定。在不脱离本实用新型设计构思的前提下,本领域普通人员对本实用新型的技术方案做出的各种变型和改进,均应落入到本实用新型的保护范围,本实用新型请求保护的技术内容,已经全部记载在权利要求书中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。