1.本实用新型属于消化内镜手术用医疗器械技术领域,具体涉及为一种食管与胃吻合后外侧精准缝合的器械。
背景技术:
2.食管胃吻合术,通常食管与胃切割后在外侧缝合之前,先用缝合机在食管内部进行周圈的吻合缝合,但仅内层一圈的吻合缝合后,在没有完全愈合之前食管内的液体会在缝合处的针眼处流出,这样会造成吻合口漏,通常为了避免这种现象的发生,需要人工进行外围的缝合,缝合时需要手术医生在腹腔镜下完成缝合。
3.现有技术的问题是:由于缝合的位置紧邻心脏,而且需要缝合一圈,在操作过程中需要把心脏稍微向上提一下避免对心脏造成损伤。同时因为有腹部的膈肌在正中,造成很大的困难,实际操作中,无法快速看到相应的缝合位置,并且对于缝合的部位很难做到精准,稍不注意容易弄破血管对患者造成二次伤害。另外由于部位所限,对于医生的手术能力要求也很高,手术时间上,时间越短越安全,这样就要求具备特别丰富手术经验的医生才能进行缝合,而很多医院的医生很难达到缝合食管与胃外侧的手术能力,因此很多医院就无法开展此项手术。
4.如果能有一种类似钉皮手术用的器械在体内完成钉合,因为钉合时无需太大空间,将会极大的减小手术难度缩短手术时间,但现有的钉皮器械在体外使用,多非常大,因此需要一种可以在体内腔镜下完成缝合的器械。
5.本实用新型针对现有技术中食管与胃外侧缝合危险性高,对医生手术要求高,无有效器械快速完成手术的技术问题,提供一种食管与胃吻合后外侧精准缝合的器械。
技术实现要素:
6.一种食管与胃吻合后外侧精准缝合的器械,其包括伸入管,伸入管前端的能打出带开口的似“口”字形缝合结构的钉合部,伸入管后端设置控制钉合部钉合的操作部;钉合部包括与伸入管一体连接的钉仓,压钉出仓的下压结构,带动下压结构下移且由操作部操作发生移动的移动块;移动块的往复运动带动下压结构反复下压及回位,钉仓内的缝合钉粘合在一起,钉仓的纵向与伸入管纵向一致,钉仓前端两侧设置阻挡缝合钉的阻挡板,两侧阻挡板之间的间距大于于似“口”字形缝合结构上方边的长度,阻挡板内侧下方设置供缝合钉下移并移出钉仓的开口;伸入管对应开口后壁前方段且钉仓下方部分设置缺口;钉仓前方中间设置“t”型支撑,“t”型支撑包括横梁一与纵向支撑梁;“t”型支撑的横梁一的长度等于似“口”字形缝合结构上方边的长度,缝合钉的两侧插入钉的长度和等于或小于似“口”字形缝合结构上方边的长度,这样通过下压结构下移缝合钉,在“t”型支撑的横向杆处发生弯折,形成似“口”字形缝合结构将组织缝合。通过此种设置可以保证缝合钉有效缝合及缝合后的有效脱出。
7.进一步,阻挡板的下边距离钉仓的底部上平面的距离大于钉仓侧壁的二分之一,
此种设置可以有效保证对未成功打出钉的取出,以方便后面的操作。
8.进一步,缝合钉的两侧插入钉的长度和不大于似“口”字形缝合结构上方边的长度。
9.进一步,似“口”字形缝合结构的四边相等。
10.进一步,“t”型支撑的一侧与钉仓一体连接,一侧伸入到开口中央,且“t”型支撑的纵向支撑梁的高度等于或大于缝合钉的插入钉一致,此种设置可以保证有效的形成“口”字缝合结构且保证使用前缝合钉缩在钉仓内。
11.进一步,钉仓后方设置闭合挡板,挡板前设置推钉弹簧,推钉弹簧前设置推钉板,此种设置可以有效推钉。
12.进一步,推钉板前设置于两侧插入钉高度及宽带一致的两侧伸出推板,此种方式更加有效实现推钉。
13.进一步,为防止在推钉过程中钉的结合处的断裂,在钉仓上方设置与钉仓连接的覆盖钉仓的覆盖盖,覆盖盖未覆盖自开口处向前的钉仓部分,且覆盖盖的上盖板距离缝合钉横梁一的距离范围为0.5
‑
2mm。此种设置可以有效保证缝合钉结合层不会发生断裂或绷出的问题。
14.进一步,下压结构包含设置在“t”型支撑的横梁一两侧的两个下压齿,下压齿的内侧边的距离等于横梁一的长度,且两侧边的空隙正对“t”型支撑的横梁一,此种设置可以有效实现在横梁一处发生弯折。
15.进一步,两下压齿在上方通过横梁二连接在一起,此种设置可以方便通过对横梁下移移动的控制实现对下压齿下移的控制,更加方便控制。
16.进一步,两下压齿的两外侧边的宽度大于两阻挡板间的间隔距离,此种设置可以有效保证下移过程中,两下压齿在阻挡板内移动,防止发生位置偏移。
17.进一步,在伸入管的侧壁伸出形成两下压齿移动轨道的两块伸出板,两块伸出板间的空隙即两下压齿的移动距离。
18.进一步,在横梁二两侧设置伸向伸入管侧壁的回位弹簧,此种设置保证下压齿下移后的自动回位。
19.进一步,移动块为厚度不等的移动块,移动块上方设置与伸入管一体连接的阻挡块,移动块厚度小的端与阻挡块接触,下压结构在上方不实现下压,移动块厚度大的端与阻挡块接触,下压结构在下方压出缝合钉,缝合伤口;通过伸入管纵向移动或横向移动实现对下移结构的下移控制。通过操作结构控制移动块的厚度小的端与厚度大的端接触阻挡块,实现下压结构的上下移动,进而实现一个一个的将缝合钉压出。
20.进一步,阻挡块与移动块接触位置设置减少移动阻力的滚动轴,滚动轴与移动块接触,此种方式可以有效减小移动阻力,保证有效实施该方案。
21.进一步,移动块前端设置连接操作部的操作绳,通过移动块的横向移动实现对下压结构的反复下压,伸入管侧壁设置操作绳变向孔,通过变向孔时操作绳由水平拉动变为沿伸入管纵向设置的垂直拉动。
22.进一步,在伸入管纵向设置不同的变向孔,保证操作绳的有效牵拉轨迹。
23.进一步,移动块的后端设置使移动块在未拉动状态复位的复位结构,其中复位结构优选与伸入管侧壁一体连接复位弹簧。
24.进一步,阻挡块设置在下压结构正上方处,此种设置方便操作。
25.进一步,变向孔设置在与下压结构下压后水平位置的伸入管内侧壁,此种设置方便操作绳的下移拉动,保证将下压结构下压到合适位置。
26.进一步,伸入管的内侧壁上也伸出在移动块两侧的限位板,限位板间的空隙为保证移动块按照设定方向移动的轨道。
27.进一步,操作部连接操作绳,且操作部为可实现牵拉与放松操作绳的结构。
28.进一步,操作部包括控制结构与旋转电机,操作绳缠绕在旋转电机的转轴上,旋转电机与控制结构连接电源,且控制结构控制旋转电机正反转动。通过控制结构控制电机的正反转实现对操作生的牵拉与放松,进而在伸入管前方实现一系列的下压与上移运动,
29.进一步,控制结构包括一个开关钮,控制结构控制按动一下开关钮完成一次缝合复位动作。
30.进一步,操作部设在在伸入管后端的手持柄内部,开关钮设置在手持部的一个方便操作的侧面上。
31.进一步,旋转电机的电机侧外部设置加固层,保证电机结构在操作手柄内部的稳定性,保证对前方结构的有效牵拉。
32.进一步,伸入管为硬质管,硬质管方便随操作者的手部运动发生对应的运动操作。
33.使用时,先借用夹持钳夹持提起需要缝合的部位,使缝合部位伸入到缺口内,通过按动按钮完成一次缝合,整个过程操作简单快速,且不用来回运针,极大的减少了对手术医生的技术要求,整个操作难度变小,且因为夹持器夹持缝合部位使缝合精准,极大的解决了临床问题。
附图说明
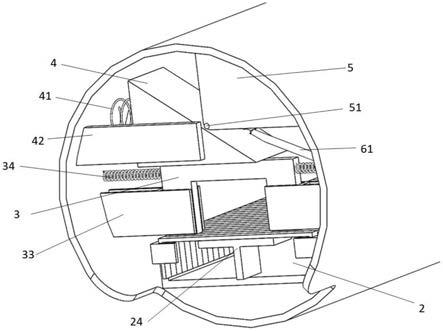
34.图1为本实用新型整体结构示意图;
35.图2为本实用新型伸入管前端结构示意图;
36.图3为本实用新型带覆盖盖的钉仓结构示意图;
37.图4为本实用新型钉仓部分结构示意图;
38.图5为本实用新型钉仓后端结构示意图;
39.图6为本实用新型下压结构部分结构示意图;
40.图7为本实用新型移动块部分结构示意图;
41.图8为本实用新型操作部部分后侧观结构上示意图;
42.图9为本实用新型操作部外侧结构上示意图;
43.图10为本实用新型似“口”字形缝合结构;
44.图中,1、伸入管;2、钉仓;21、阻挡板;22、开口;23、缺口;24、“t”型支撑;241、横梁一;242、纵向支撑梁;25、缝合钉;26、似“口”字形缝合结构;27、闭合挡板;271、推钉弹簧;272、推钉板;273、伸出推板;28、覆盖盖;3、下压结构;31、下压齿;32、横梁二;33、伸出板;34、回位弹簧;4、移动块;41、复位弹簧;42、限位板;5、阻挡块;51、滚动轴;61、操作绳;62、变向孔;63、控制结构;64、旋转电机;65、转轴;66、开关钮; 67、手持柄;68、加固层。
正上方处,此种设置方便操作。
54.移动块4前端设置连接操作部的操作绳61,通过移动块4的横向往复移动实现对下压结构3的反复下压,伸入管1侧壁设置操作绳61变向孔62,通过变向孔62时操作绳61由水平拉动变为沿伸入管1纵向设置的垂直拉动。在伸入管1纵向设置不同的变向孔62,保证操作绳61的有效牵拉轨迹。移动块4的后端设置使移动块4在未拉动状态复位的复位结构,其中复位结构优选与伸入管1侧壁一体连接复位弹簧41。
55.变向孔62设置在与下压结构3下压后水平位置的伸入管1内侧壁,此种设置方便操作绳61的下移拉动,保证将下压结构3下压到合适位置。
56.伸入管1的内侧壁上也伸出在移动块4两侧的限位板42,限位板42间的空隙为保证移动块4按照设定方向移动的轨道。
57.操作部连接操作绳61,且操作部为可实现牵拉与放松操作绳61的结构。操作部包括控制结构63与旋转电机64,操作绳61缠绕在旋转电机64的转轴 65上,旋转电机64与控制结构63连接电源,且控制结构63控制旋转电机64 正反转动。通过控制结构63控制电机的正反转实现对操作生的牵拉与放松,进而在伸入管1前方实现一系列的下压与上移运动,控制结构63包括一个开关钮66,控制结构63控制按动一下开关钮66完成一次缝合复位动作。操作部设在在伸入管1后端的手持柄67内部,开关钮66设置在手持部的一个方便操作的侧面上。
58.伸入管1为硬质管,硬质管方便随操作者的手部运动发生对应的运动操作。
59.实施例2一种食管与胃吻合后外侧精准缝合的器械
60.一种食管与胃吻合后外侧精准缝合的器械,其包括伸入管1,伸入管1前端的能打出带开口22的似“口”字形缝合结构26的钉合部,伸入管1后端设置控制钉合部钉合的操作部;钉合部包括与伸入管1一体连接的钉仓2,压钉出仓的下压结构3,带动下压结构3下移且由操作部操作发生移动的移动块4;移动块4的往复运动带动下压结构3反复下压及回位,钉仓2内的缝合钉25 粘合在一起,钉仓2的纵向与伸入管1纵向一致,钉仓2前端两侧设置阻挡缝合钉25的阻挡板21,两侧阻挡板21之间的间距大于于似“口”字形缝合结构26上方边的长度,阻挡板21内侧下方设置供缝合钉25下移并移出钉仓2 的开口22;伸入管1对应开口22后壁前方段且钉仓2下方部分设置缺口23;钉仓2前方中间设置”t”型支撑24,”t”型支撑24包括横梁一241与纵向支撑梁242;”t”型支撑24的横梁一241的长度等于似“口”字形缝合结构26上方边的长度,缝合钉25的两侧插入钉的长度和等于或小于似“口”字形缝合结构26上方边的长度,这样通过下压结构3下移缝合钉25,在”t”型支撑24的横向杆处发生弯折,形成似“口”字形缝合结构26将组织缝合。通过此种设置可以保证缝合钉25有效缝合及缝合后的有效脱出。
61.阻挡板21的下边距离钉仓2的底部上平面的距离大于钉仓2侧壁的二分之一,此种设置可以有效保证对未成功打出钉的取出,以方便后面的操作。
62.缝合钉25的两侧插入钉的长度和不大于似“口”字形缝合结构26上方边的长度。似“口”字形缝合结构26的四边相等。
[0063]“t”型支撑24的一侧与钉仓2一体连接,一侧伸入到开口22中央,且
”ꢀ
t”型支撑24的纵向支撑梁242的高度等于或大于缝合钉25的插入钉一致,此种设置可以保证有效的形成“口”字缝合结构且保证使用前缝合钉25缩在钉仓2内。
[0064]
钉仓2后方设置闭合挡板27,挡板前设置推钉弹簧271,推钉弹簧271前设置推钉板272,此种设置可以有效推钉。
[0065]
推钉板272前设置于两侧插入钉高度及宽带一致的两侧伸出推板273,此种方式更加有效实现推钉。
[0066]
为防止在推钉过程中钉的结合处的断裂,在钉仓2上方设置与钉仓2连接的覆盖钉仓2的覆盖盖28,覆盖盖28未覆盖自开口22处向前的钉仓2部分,且覆盖盖28的上盖板距离缝合钉25横梁一241的距离范围为0.5
‑
2mm。此种设置可以有效保证缝合钉25结合层不会发生断裂或绷出的问题。
[0067]
下压结构3包含设置在”t”型支撑24的横梁一241两侧的两个下压齿 31,下压齿31的内侧边的距离等于横梁一241的长度,且两侧边的空隙正对
”ꢀ
t”型支撑24的横梁一241,此种设置可以有效实现在横梁一241处发生弯折。两下压齿31在上方通过横梁二32连接在一起,此种设置可以方便通过对横梁下移移动的控制实现对下压齿31下移的控制,更加方便控制。两下压齿31的两外侧边的宽度大于两阻挡板21间的间隔距离,此种设置可以有效保证下移过程中,两下压齿31在阻挡板21内移动,防止发生位置偏移。在伸入管1的侧壁伸出形成两下压齿31移动轨道的两块伸出板33,两块伸出板33间的空隙即两下压齿31的移动距离。在横梁二32两侧设置伸向伸入管1侧壁的回位弹簧34,此种设置保证下压齿31下移后的自动回位。
[0068]
移动块4为厚度不等的移动块4,移动块4上方设置与伸入管1一体连接的阻挡块5,移动块4厚度小的端与阻挡块5接触,下压结构3在上方不实现下压,移动块4厚度大的端与阻挡块5接触,下压结构3在下方压出缝合钉 25,缝合伤口;通过伸入管1横向移动实现对下移结构的下移控制。通过操作结构控制移动块4的厚度小段与厚度大端接触阻挡块5,实现下压结构3的上下移动,进而实现一个一个的将缝合钉25压出。阻挡块5设置在下压结构3 正上方处,此种设置方便操作。
[0069]
阻挡块5与移动块4接触位置设置减少移动阻力的滚动轴51,滚动轴51 与移动块4接触,此种方式可以有效减小移动阻力,保证有效实施该方案。
[0070]
移动块4前端设置连接操作部的操作绳61,通过移动块4的横向往复移动实现对下压结构3的反复下压,伸入管1侧壁设置操作绳61变向孔62,通过变向孔62时操作绳61由水平拉动变为沿伸入管1纵向设置的垂直拉动。在伸入管1纵向设置不同的变向孔62,保证操作绳61的有效牵拉轨迹。移动块 4的后端设置使移动块4在未拉动状态复位的复位结构,其中复位结构优选与伸入管1侧壁一体连接复位弹簧41。
[0071]
变向孔62设置在与下压结构3下压后水平位置的伸入管1内侧壁,此种设置方便操作绳61的下移拉动,保证将下压结构3下压到合适位置。
[0072]
伸入管1的内侧壁上也伸出在移动块4两侧的限位板42,限位板42间的空隙为保证移动块4按照设定方向移动的轨道。
[0073]
操作部连接操作绳61,且操作部为可实现牵拉与放松操作绳61的结构。
[0074]
操作部包括控制结构63与旋转电机64,操作绳61缠绕在旋转电机64的转轴65上,旋转电机64与控制结构63连接电源,且控制结构63控制旋转电机64正反转动。通过控制结构63控制电机的正反转实现对操作生的牵拉与放松,进而在伸入管1前方实现一系列的下压与上移运动,控制结构63包括一个开关钮66,控制结构63控制按动一下开关钮66完成一
次缝合复位动作。操作部设在在伸入管1后端的手持柄67内部,开关钮66设置在手持部的一个方便操作的侧面上。伸入管1为硬质管,硬质管方便随操作者的手部运动发生对应的运动操作。
[0075]
实施例3一种食管与胃吻合后外侧精准缝合的器械
[0076]
一种食管与胃吻合后外侧精准缝合的器械,其包括伸入管1,伸入管1前端的能打出带开口22的似“口”字形缝合结构26的钉合部,伸入管1后端设置控制钉合部钉合的操作部;钉合部包括与伸入管1一体连接的钉仓2,压钉出仓的下压结构3,带动下压结构3下移且由操作部操作发生移动的移动块4;移动块4的往复运动带动下压结构3反复下压及回位,钉仓2内的缝合钉25 粘合在一起,钉仓2的纵向与伸入管1纵向一致,钉仓2前端两侧设置阻挡缝合钉25的阻挡板21,两侧阻挡板21之间的间距大于于似“口”字形缝合结构26上方边的长度,阻挡板21内侧下方设置供缝合钉25下移并移出钉仓2 的开口22;伸入管1对应开口22后壁前方段且钉仓2下方部分设置缺口23;钉仓2前方中间设置”t”型支撑24,”t”型支撑24包括横梁一241与纵向支撑梁242;”t”型支撑24的横梁一241的长度等于似“口”字形缝合结构 26上方边的长度,缝合钉25的两侧插入钉的长度和等于或小于似“口”字形缝合结构26上方边的长度,这样通过下压结构3下移缝合钉25,在”t”型支撑24的横向杆处发生弯折,形成似“口”字形缝合结构26将组织缝合。通过此种设置可以保证缝合钉25有效缝合及缝合后的有效脱出。
[0077]
阻挡板21的下边距离钉仓2的底部上平面的距离大于钉仓2侧壁的二分之一,此种设置可以有效保证对未成功打出钉的取出,以方便后面的操作。
[0078]
缝合钉25的两侧插入钉的长度和不大于似“口”字形缝合结构26上方边的长度。
[0079]“t”型支撑24的一侧与钉仓2一体连接,一侧伸入到开口22中央,且”[0080]
t”型支撑24的纵向支撑梁242的高度等于或大于缝合钉25的插入钉一致,此种设置可以保证有效的形成“口”字缝合结构且保证使用前缝合钉25缩在钉仓2内。
[0081]
钉仓2后方设置闭合挡板27,挡板前设置推钉弹簧271,推钉弹簧271前设置推钉板272,此种设置可以有效推钉。
[0082]
推钉板272前设置于两侧插入钉高度及宽带一致的两侧伸出推板273,此种方式更加有效实现推钉。
[0083]
为防止在推钉过程中钉的结合处的断裂,在钉仓2上方设置与钉仓2连接的覆盖钉仓2的覆盖盖28,覆盖盖28未覆盖自开口22处向前的钉仓2部分,且覆盖盖28的上盖板距离缝合钉25横梁一241的距离范围为0.5
‑
2mm。此种设置可以有效保证缝合钉25结合层不会发生断裂或绷出的问题。
[0084]
下压结构3包含设置在”t”型支撑24的横梁一241两侧的两个下压齿 31,下压齿31的内侧边的距离等于横梁一241的长度,且两侧边的空隙正对
”ꢀ
t”型支撑24的横梁一241,此种设置可以有效实现在横梁一241处发生弯折。两下压齿31在上方通过横梁二32连接在一起,此种设置可以方便通过对横梁下移移动的控制实现对下压齿31下移的控制,更加方便控制。两下压齿31的两外侧边的宽度大于两阻挡板21间的间隔距离,此种设置可以有效保证下移过程中,两下压齿31在阻挡板21内移动,防止发生位置偏移。在伸入管1的侧壁伸出形成两下压齿31移动轨道的两块伸出板33,两块伸出板33间的空隙即两下压齿31的移动距离。在横梁二32两侧设置伸向伸入管1侧壁的回位弹簧34,此种设置保证下压齿31下移后
的自动回位。
[0085]
移动块4为厚度不等的移动块4,移动块4上方设置与伸入管1一体连接的阻挡块5,移动块4厚度小的端与阻挡块5接触,下压结构3在上方不实现下压,移动块4厚度大的端与阻挡块5接触,下压结构3在下方压出缝合钉 25,缝合伤口;通过伸入管1纵向移动实现对下移结构的下移控制。通过操作结构控制移动块4的厚度小段与厚度大端接触阻挡块5,实现下压结构3的上下移动,进而实现一个一个的将缝合钉25压出。阻挡块5设置在下压结构3 正上方处,此种设置方便操作。
[0086]
阻挡块5与移动块4接触位置设置减少移动阻力的滚动轴51,滚动轴51 与移动块4接触,此种方式可以有效减小移动阻力,保证有效实施该方案。
[0087]
移动块4前端设置连接操作部的操作绳61,通过移动块4的纵向往复移动实现对下压结构3的反复下压,伸入管1侧壁设置保证前后移动的操作绳 61设置孔,移动块4的尺寸较小端设置在伸入管1的前端,通过操作绳61带动移动块4向后移动使下压结构3向下移动。在伸入管1纵向设置不同的设置孔,保证操作绳61的有效牵拉轨迹。移动块4的后端设置使移动块4在未拉动状态复位的复位结构,其中复位结构优选与伸入管1侧壁一体连接复位弹簧41。
[0088]
变向孔62设置在与下压结构3下压后水平位置的伸入管1内侧壁,此种设置方便操作绳61的下移拉动,保证将下压结构3下压到合适位置。
[0089]
伸入管1的内侧壁上也伸出在移动块4两侧的限位板42,限位板42间的空隙为保证移动块4按照设定方向移动的轨道。
[0090]
操作部连接操作绳61,且操作部为可实现牵拉与放松操作绳61的结构。
[0091]
操作部包括控制结构63与旋转电机64,操作绳61缠绕在旋转电机64的转轴65上,旋转电机64与控制结构63连接电源,且控制结构63控制旋转电机64正反转动。通过控制结构63控制电机的正反转实现对操作生的牵拉与放松,进而在伸入管1前方实现一系列的下压与上移运动,控制结构63包括一个开关钮66,控制结构63控制按动一下开关钮66完成一次缝合复位动作。
[0092]
操作部设在在伸入管1后端的手持柄67内部,开关钮66设置在手持部的一个方便操作的侧面上。
[0093]
旋转电机64的电机侧外部设置加固层68,保证电机结构在操作手柄内部的稳定性,保证对前方结构的有效牵拉。
[0094]
伸入管1为硬质管,硬质管方便随操作者的手部运动发生对应的运动操作。
[0095]
实施例4一种食管与胃吻合后外侧精准缝合的器械
[0096]
一种食管与胃吻合后外侧精准缝合的器械,其包括伸入管1,伸入管1前端的能打出带开口22的似“口”字形缝合结构26的钉合部,伸入管1后端设置控制钉合部钉合的操作部;钉合部包括与伸入管1一体连接的钉仓2,压钉出仓的下压结构3,带动下压结构3下移且由操作部操作发生移动的移动块4;移动块4的往复运动带动下压结构3反复下压及回位,钉仓2内的缝合钉25 粘合在一起,钉仓2的纵向与伸入管1纵向一致,钉仓2前端两侧设置阻挡缝合钉25的阻挡板21,两侧阻挡板21之间的间距大于于似“口”字形缝合结构26上方边的长度,阻挡板21内侧下方设置供缝合钉25下移并移出钉仓2 的开口22;伸入管1对应开口22后壁前方段且钉仓2下方部分设置缺口23;钉仓2前方中间设置”t”型支撑24,”t”型支撑24包
括横梁一241与纵向支撑梁242;”t”型支撑24的横梁一241的长度等于似“口”字形缝合结构26上方边的长度,缝合钉25的两侧插入钉的长度和等于或小于似“口”字形缝合结构26上方边的长度,这样通过下压结构3下移缝合钉25,在”t”型支撑24的横向杆处发生弯折,形成似“口”字形缝合结构26将组织缝合。通过此种设置可以保证缝合钉25有效缝合及缝合后的有效脱出。
[0097]
阻挡板21的下边距离钉仓2的底部上平面的距离大于钉仓2侧壁的二分之一,此种设置可以有效保证对未成功打出钉的取出,以方便后面的操作。
[0098]
缝合钉25的两侧插入钉的长度和不大于似“口”字形缝合结构26上方边的长度。似“口”字形缝合结构26的四边相等。
[0099]“t”型支撑24的一侧与钉仓2一体连接,一侧伸入到开口22中央,且
”ꢀ
t”型支撑24的纵向支撑梁242的高度等于或大于缝合钉25的插入钉一致,此种设置可以保证有效的形成“口”字缝合结构且保证使用前缝合钉25缩在钉仓2内。
[0100]
钉仓2后方设置闭合挡板27,挡板前设置推钉弹簧271,推钉弹簧271前设置推钉板272,此种设置可以有效推钉。
[0101]
推钉板272前设置于两侧插入钉高度及宽带一致的两侧伸出推板273,此种方式更加有效实现推钉。
[0102]
为防止在推钉过程中钉的结合处的断裂,在钉仓2上方设置与钉仓2连接的覆盖钉仓2的覆盖盖28,覆盖盖28未覆盖自开口22处向前的钉仓2部分,且覆盖盖28的上盖板距离缝合钉25横梁一241的距离范围为0.5
‑
2mm。此种设置可以有效保证缝合钉25结合层不会发生断裂或绷出的问题。
[0103]
下压结构3包含设置在”t”型支撑24的横梁一241两侧的两个下压齿31,下压齿31的内侧边的距离等于横梁一241的长度,且两侧边的空隙正对
”ꢀ
t”型支撑24的横梁一241,此种设置可以有效实现在横梁一241处发生弯折。两下压齿31在上方通过横梁二32连接在一起,此种设置可以方便通过对横梁下移移动的控制实现对下压齿31下移的控制,更加方便控制。两下压齿31的两外侧边的宽度大于两阻挡板21间的间隔距离,此种设置可以有效保证下移过程中,两下压齿31在阻挡板21内移动,防止发生位置偏移。在伸入管1的侧壁伸出形成两下压齿31移动轨道的两块伸出板33,两块伸出板33间的空隙即两下压齿31的移动距离。在横梁二32两侧设置伸向伸入管1侧壁的回位弹簧34,此种设置保证下压齿31下移后的自动回位。
[0104]
移动块4为厚度不等的移动块4,移动块4上方设置与伸入管1一体连接的阻挡块5,移动块4厚度小的端与阻挡块5接触,下压结构3在上方不实现下压,移动块4厚度大的端与阻挡块5接触,下压结构3在下方压出缝合钉 25,缝合伤口;通过伸入管1横向移动实现对下移结构的下移控制。通过操作结构控制移动块4的厚度小段与厚度大端接触阻挡块5,实现下压结构3的上下移动,进而实现一个一个的将缝合钉25压出。阻挡块5设置在下压结构3 正上方处,此种设置方便操作。
[0105]
阻挡块5与移动块4接触位置设置减少移动阻力的滚动轴51,滚动轴51 与移动块4接触,此种方式可以有效减小移动阻力,保证有效实施该方案。
[0106]
移动块4前端设置连接操作部的操作绳61,通过移动块4的横向往复移动实现对下压结构3的反复下压,伸入管1侧壁设置操作绳61变向孔62,通过变向孔62时操作绳61由水
平拉动变为沿伸入管1纵向设置的垂直拉动。在伸入管1纵向设置不同的变向孔62,保证操作绳61的有效牵拉轨迹。移动块 4的后端设置使移动块4在未拉动状态复位的复位结构,其中复位结构优选与伸入管1侧壁一体连接复位弹簧41。变向孔62设置在与下压结构3下压后水平位置的伸入管1内侧壁,此种设置方便操作绳61的下移拉动,保证将下压结构3下压到合适位置。
[0107]
伸入管1的内侧壁上也伸出在移动块4两侧的限位板42,限位板42间的空隙为保证移动块4按照设定方向移动的轨道。操作部连接操作绳61,且操作部为可实现牵拉与放松操作绳61的结构。
[0108]
操作部包括控制结构63与旋转电机64,操作绳61缠绕在旋转电机64的转轴65上,旋转电机64与控制结构63连接电源,且控制结构63控制旋转电机64正反转动。通过控制结构63控制电机的正反转实现对操作生的牵拉与放松,进而在伸入管1前方实现一系列的下压与上移运动,控制结构63包括一个开关钮66,控制结构63控制按动一下开关钮66完成一次缝合复位动作。操作部设在在伸入管1后端的手持柄67内部,开关钮66设置在手持部的一个方便操作的侧面上。旋转电机64的电机侧外部设置加固层68,保证电机结构在操作手柄内部的稳定性,保证对前方结构的有效牵拉。伸入管1为硬质管,硬质管方便随操作者的手部运动发生对应的运动操作。
[0109]
上述实施例的说明只是用于理解本实用新型。应当指出,对于本领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以对本实用新型进行若干改进,这些改进也将落入本实用新型权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

