一种可精准识别自动化icsi系统及操作方法
技术领域
1.本发明特别涉及一种可精准识别自动化icsi系统及操作方法。
背景技术:
2.辅助生殖技术是一种集体外受精、胚胎培养、胚胎移植等技术于一体的综合性技术,主要用于各种原因引起的不孕不育,帮助广大患者成功孕育后代。
3.目前,针对因男性问题引起的不孕或用于冷冻卵子的受精,通过采用卵胞浆单精子注射(icsi)技术,该技术对于操作者的实验技能要求较高,它要求操作者须充分熟知并掌握显微操作系统的各个运动轨迹,掌握精子筛选规则以及精子制动原则,充分认识并熟知卵子注射部位以及注射要领,即需做到“稳”“准”“快”操作要领,一般培养一名优秀的操作者至少需要花费2年的时间,方可获得较好的实验结果,并且,目前各大生殖中心均采用此种方式进行实验,而即使是一名非常优秀的操作者,由于患者周期数增多,或其他不可控因素,而出现实验结果不稳定等现象的发生。
技术实现要素:
4.本发明要解决的技术问题是:为了克服现有技术的不足,提供一种可精准识别自动化icsi系统及操作方法。
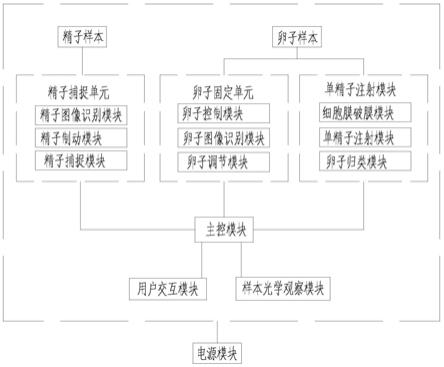
5.本发明解决其技术问题所采用的技术方案是:一种可精准识别自动化icsi系统,包括电源模块,还包括主控模块、样本光学观察模块、用户交互模块、精子捕捉单元、卵子固定单元、和单精子注射单元,所述样本光学观察模块、用户交互模块、精子捕捉单元、卵子固定单元和单精子注射单元均与主控模块电连接;
6.所述精子捕捉单元包括精子图像识别模块、精子制动模块和精子捕捉模块;
7.所述卵子固定单元包括卵子控制模块、卵子图像识别模块和卵子调节模块;
8.所述单精子注射单元包括细胞膜破膜模块、单精子注射模块和卵子归类模块;
9.所述主控模块、样本光学观察模块、用户交互模块、精子捕捉单元、卵子固定单元、和单精子注射单元均与电源模块电连接。
10.作为优选,所述样本光学观察模块、精子图像识别模块和卵子图像识别模块均包括纺锤体观察仪和ai图像识别系统。
11.作为优选,所述精子制动模块包括显微操作臂,所述精子捕捉模块包括精子注射针。
12.作为优选,所述卵子控制模块包括持卵针,所述卵子调节模块包括显微操作臂。
13.作为优选,所述细胞膜破膜模块包括激光破膜仪,所述单精子注射模块包括精子注射针,所述卵子归类模块包括操作皿。
14.一种如上所述的可精准识别自动化icsi系统的操作方法,包括以下步骤:
15.1)精子捕捉:首先采用精子图像识别模块从精子样本中进行识别,从形态、游动速率、游动方式等精子参数中确定优质精子,然后采用精子注射针的针头在该优质精子的尾
部后三分之一处造成损伤,使其停止游动,再通过精子图像识别模块结合精子注射针将该精子吸入,并微调至距注射针口2
‑
5mm处;
16.2)卵子固定:从卵子样本中选取一个成熟卵子,通过负压将该卵子固定,再将精子注射针移至卵子滴,然后通过纺锤体观察仪观察纺锤体的位置,通过精子注射针将卵子转动,使得纺锤体位于卵子的12点钟或6点钟方向;
17.3)单精子注射:水平移动卵子,使卵子3点钟方向的透明带正好位于激光破膜仪的激光处,此时持卵针、卵子3点钟方向和精子注射针位于同一水平线上,静置一段时间后,采用激光破膜仪对卵子进行破膜,然后将精子注射针内的精子推至注射针口的0.1
‑
0.2mm处,然后水平移动精子注射针,使得精子注射针进入到卵子内的三分之二处,经液压系统控制使精子恰好从精子注射针中流出,再缓慢抽出精子注射针,使用持卵针移动卵子至卵子滴中的的指定位置后松开持卵针,完成受精。
18.作为优选,步骤3)中,静置的时间为2
‑
3s。
19.本发明的有益效果是,本发明的可精准识别自动化icsi系统及操作方法,能够代替人工实现自动化,实验结构稳定可靠,采用ai图像系统来识别健康优质的精子并且智能识别卵子纺锤体部位,能够将最优质的精子经最恰当的位置进针注射,极大地降低了对卵子的损伤,最大限度地降低因人为因素造成的各种受精失败或胚胎发育潜能地下的几率。
附图说明
20.下面结合附图和实施例对本发明进一步说明。
21.图1是本发明的可精准识别自动化icsi系统的系统原理图;
22.图2是精子注射针、卵子和持卵针的穿针前的位置状态图;
23.图3是精子注射针、卵子和持卵针的穿针后的位置状态图;
具体实施方式
24.现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
25.如图1所示,一种可精准识别自动化icsi系统,包括电源模块,还包括主控模块、样本光学观察模块、用户交互模块、精子捕捉单元、卵子固定单元、和单精子注射单元,所述样本光学观察模块、用户交互模块、精子捕捉单元、卵子固定单元和单精子注射单元均与主控模块电连接;
26.所述精子捕捉单元包括精子图像识别模块、精子制动模块和精子捕捉模块;
27.所述卵子固定单元包括卵子控制模块、卵子图像识别模块和卵子调节模块;
28.所述单精子注射单元包括细胞膜破膜模块、单精子注射模块和卵子归类模块;
29.所述主控模块、样本光学观察模块、用户交互模块、精子捕捉单元、卵子固定单元、和单精子注射单元均与电源模块电连接。
30.作为优选,所述样本光学观察模块、精子图像识别模块和卵子图像识别模块均包括纺锤体观察仪和ai图像识别系统。
31.作为优选,所述精子制动模块包括显微操作臂,所述精子捕捉模块包括精子注射针。
32.作为优选,所述卵子控制模块包括持卵针,所述卵子调节模块包括显微操作臂。
33.作为优选,所述细胞膜破膜模块包括激光破膜仪,所述单精子注射模块包括精子注射针,所述卵子归类模块包括操作皿。
34.主控模块为中央控制器,实现对整个系统的控制;
35.用户交互模块为人机,实现对该系统的人机操作;
36.电源模块用于对整个系统供电。
37.实际上,该系统具有两个显微操作臂,精子注射针和持卵针分别设置在两个显微操作臂上,而这两个显微操作臂则是通过自动控制机构实现角度和位置的调节,精子注射针和持卵针则是分别通过液压系统的驱动来实现内部气压的调节,即实现自动化抽拉,并且通过预先设定的参数来实现自动化微控制。
38.精子图像识别模块实际上为ai图像识别系统,能够实现对运动精子的识别,并且获取精子运动的数据。
39.一种如上所述的可精准识别自动化icsi系统的操作方法,包括以下步骤:
40.1)精子捕捉:首先采用精子图像识别模块从精子样本中进行识别,从形态、游动速率、游动方式等精子参数中确定优质精子,然后采用精子注射针的针头在该优质精子的尾部后三分之一处造成损伤,使其停止游动,再通过精子图像识别模块结合精子注射针将该精子吸入,并微调至距注射针口2
‑
5mm处;
41.在系统数据库中预先植入大量优质精子的数据,在操作时,精子图像识别模块能够对精子样本中的众多精子进行识别以及数据采集,并且将采集到的数据与系统里的数据进行比对,从而确定优质精子。
42.2)卵子固定:从卵子样本中选取一个成熟卵子,通过负压将该卵子固定,再将精子注射针移至卵子滴,然后通过纺锤体观察仪观察纺锤体的位置,通过精子注射针将卵子转动,使得纺锤体位于卵子的12点钟或6点钟方向;
43.在实际操作时,实际上是需要对卵子进行筛选的,即在选取卵子后,通过纺锤体观察仪来观察卵子的纺锤体(极体),如果不能观察到,则说明卵子并未成熟,无法使用,则重新选取卵子,重复上述操作,直到选取到成熟的卵子。
44.3)单精子注射:水平移动卵子,使卵子3点钟方向的透明带正好位于激光破膜仪的激光处,如图2所示,此时持卵针、卵子3点钟方向和精子注射针位于同一水平线上,静置一段时间后,采用激光破膜仪对卵子进行破膜,如图3所示,圆点的位置即为激光射入的位置,然后将精子注射针内的精子推至注射针口的0.1
‑
0.2mm处,然后水平移动精子注射针,使得精子注射针进入到卵子内的三分之二处,经液压系统控制使精子恰好从精子注射针中流出,再缓慢抽出精子注射针,使用持卵针移动卵子至卵子滴中的的指定位置后松开持卵针,完成受精。
45.作为优选,步骤3)中,静置的时间为2
‑
3s。
46.整个操作过程中,都是在ai图像系统下进行,图像系统对整个过程进行图像采集,并且将数据传送至主控模块,主控模块根据预先设定的参数执行动作,即控制两个显微操作臂的位置和角度、通过控制液压系统来实现对持卵针和精子注射针的控制。
47.与现有技术相比,本发明的可精准识别自动化icsi系统及操作方法,能够代替人工实现自动化,实验结构稳定可靠,采用ai图像系统来识别健康优质的精子并且智能识别
卵子纺锤体部位,能够将最优质的精子经最恰当的位置进针注射,极大地降低了对卵子的损伤,最大限度地降低因人为因素造成的各种受精失败或胚胎发育潜能地下的几率。
48.以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

