1.本发明涉及医疗眼科检测技术领域,具体涉及一种多维检测仪,主要检测眼睛的屈光度、眼轴长度、晶状体厚度数据,输出含眼睛调节力系数的配镜方案、眼睛近视风险等级评测报告和近视防控方案报告。
背景技术:
2.随着眼科医疗检测技术的发展,眼科医疗检测设备得到了快速发展,电脑验光仪、视光生物检测仪已获得广泛应用,极大地方便了验光配镜、眼科疾病诊断治疗的需求,视光检查在青少年视力健康防控普查中发挥着很大作用。存在的问题是检测设备功能单一,眼睛的主要物理参数需多种设备检测,检测数据应用有效性差,不能精准预测,干预无法做到个性化,没有对应的个性化防控预案,简单片面适宜性差的问题普遍存在。
3.近视防控治疗受个体因素影响很大,例如验光仪因操作人员熟练程度差、病人配合程度不够等影响,以及个人眼睛的调节能力不同,带来了验光仪输出结果的分散性、不确定性。即使散瞳后,也不是所有人都可按散瞳度数直接配镜,都存在远视需预留适当调解,近视不能满配防止推高度数的问题。这对眼睛处在发育期的儿童,带来的伤害是致命的。业务不精的验光师给少年儿童配不恰当度数的眼镜,会使本可以预后较好的眼睛视力变差。如何有效地为屈光不正的人们验光配镜,将视光专家的成熟技术推广应用,是眼科领域的重要科题之一。眼睛处于发育期的青少年儿童用当今市场通用的成人电脑验光仪验光配镜,如果没有专家指导,按照电脑验光仪给出的屈光度配镜,就可能破坏青少年儿童正向视力的发展,抑制眼睛调节力的发挥,结果会使可塑性视力消失,导致视力不可恢复的损害。
4.对近视发生风险的评价,目前国内外还无此类精准研判的设备,存在着误诊乱判导致失去防控最佳时期的问题,有的单纯利用眼轴长度的变化趋势进行预测,忽略青少年发育成长阶段眼睛综合生物参数的相互关联性及个体差异,给出不合理的防控建议和措施,延误视力健康的治疗和防控,最根本原因是缺少具有动态思维和个性化解决方案、缺少经验丰富的眼视光专家和临床技术,导致眼视光干预和防控不科学、质量不高,缺乏精准性。
5.本发明提供的多维检测仪正是为精准检测和防控青少年眼视光问题而设计的眼视光检测和防控方案输出的智能设备,该设备以儿童青少年屈光正常发育为基础,对屈光不正性斜弱视、真假近视有针对性研究,结合眼科视光专家治疗屈光不正成功案例建立的数据库,研究通用性的儿童青少年屈光不正验光配镜的规律,提升儿童验光配镜的准确性和有效性。
6.多维检测仪以眼视光系统多种数据,如年龄、屈光度、眼轴长度、晶状体厚度参数的关联性,可以对眼睛发生近视风险的等级进行预判,风险分四个等级,0近视风险、轻度近视风险、中度近视风险、重度近视风险。依托眼视光专家理论和实践经验数据库系统,给出精准的近视风险判断和防控治疗方案,为青少年弱视近视的治疗和防控提供了精准的手段。
技术实现要素:
7.为此,本发明所要解决的技术问题是:提供一种多维检测仪,在计算机电路控制下可以完成眼睛屈光度、散光度、轴相位度数、眼轴长度、晶状体厚度等参数的自动测量,输出含眼睛调节力系数的配镜方案、眼睛近视风险等级评测报告和防控方案报告。检测数据受外在人为因素影响小,参考力度大。
8.本发明提供了一种多维检测仪,包括:计算机控制电路、光学传导测量部件、输入输出部件、电源供电电路和机箱部件,所述计算机控制电路用于控制所述光学传导测量部件完成眼睛指标参数的获取,并通过输入输出部件输出检测结果和具有眼睛潜在调节力系数的验光配镜报告,其中,所述光学传导测量部件包括:用于眼睛与测量窗口对位的眼睛定位装置、用于眼睛视网膜测量对焦的视网膜裂像对焦装置、用于眼睛视光轴线与测量仪视光轴线对位的固视装置、用于对屈光不正眼睛的测量焦点校准及微调的辅助对焦装置、用于测量眼睛参数的光学低相干干涉测量和屈光轴向测量装置、用于眼睛视标注视放松调节的眼睛调节状态固定装置、用于光学低相干干涉生物测量参考光的光程变换的参考光光程处理装置;所述光学低相干干涉测量和屈光轴向测量装置包括:第一检测光源、第四透镜、第二反射镜、光栅转鼓、第二分光棱镜、第五透镜、光阑、第六透镜、光电探测器、第二检测光源、光纤、第一光纤准直器、第二光纤准直器、焦点联动器、第三反射镜、第一半透半反镜、第二半透半反镜;所述光学低相干干涉测量和屈光轴向测量装置用于实现对于如下参数中的一个或多个的测量:眼睛屈光参数、晶体厚度、眼轴长度、角膜厚度、前房深度、视网膜厚度;当所述光学低相干干涉测量和屈光轴向测量装置进行眼屈光测量时,第一检测光源发出的光斑经过第四透镜、第二反射镜,照射有多个相等空隙的光栅转鼓以产生光斑,经光栅转鼓中的第二分光棱镜射出,再经第一半透半反镜进入被测眼睛;当光栅转鼓匀速旋转时,将在被测眼睛的眼底形成匀速移动的光斑,所述光斑由被测眼睛的眼底射出,又经过第五透镜、光阑,被光电探测器接收并转换为电信号;根据该电信号得到成像面与光阑的位置关系,判断被测眼睛的屈光状态,并计算出被测眼睛的屈光度数。
9.优选的,所述眼睛定位装置包括:视轴位置调整陀螺、监视器、电荷耦合器、第十透镜、额托调整架,被测眼睛的图像通过电荷耦合器转换为电信号后在监视器上显示,所述额托调整架用于调整被测者的头部位置,所述视轴位置调整陀螺用于调整所述多维检测仪的位置和方向以使得被测眼睛的视轴与所述多维检测仪的光轴重合。
10.优选的,所述视网膜裂像对焦装置包括:视网膜对焦光源、第一透镜、双光楔、狭缝、第三半透半反镜、第二透镜、ccd光耦合器、第一反射镜;其中,视网膜对焦光源发出的光线经第一透镜、双光楔、狭缝、第三半透半反镜、第一反射镜后聚焦于眼睛视网膜形成双裂像;从视网膜返回的双裂像通过第二透镜成像于ccd光耦合器上并转换为电信号,成像于监视器上。
11.优选的,所述固视装置包括视标光源、图形分划板、第一分光棱镜、第三透镜;其中,视标光源发出的光照射在图形分划板上,将图形分划板上的图形映射到第一分光棱镜上,再经第三透镜、第二半透半反镜,使眼睛看到一个远方视标图形,形成眼睛固定注视。
12.优选的,所述辅助对焦装置包括由聚焦透镜和第十一透镜组成的透镜组,当用于检测屈光不正的眼睛时,通过微调两个透镜的位置,能够使眼睛的视轴线与所述多维检测仪的光轴线重合一线,使探测光聚焦到视网膜表面中心位置。
13.优选的,所述眼睛调节状态固定装置包括:定位光源、第七透镜、第四半透半反镜、第四反射镜、环形孔板、第八透镜、十字形孔板、第九透镜、第五半透半反镜、第五反射镜;其中,定位光源发出光斑,通过第七透镜、第四半透半反镜形成两条光路,第一条光路通过十字形孔板,第九透镜,形成十字图像,第二条光路通过第四反射镜、环形孔板、第八透镜,形成环形图像,所述十字图像和环形图像通过光轴照射到被测眼睛,从眼睛反射的光被电荷耦合器和监视器接收。
14.优选的,所述计算机控制电路用于通过眼睛调节力补偿算法生成具有眼睛潜在调节力系数的验光配镜报告,以及通过近视风险等级预测算法生成近视风险评级报告和近视防控措施建议报告。
15.所述眼睛定位装置用于完成被测人员的头部固定,眼睛与测量窗口的对位功能。
16.所述视网膜裂像对焦装置完成眼睛视网膜测量对焦功能。
17.所述固视装置完成眼睛视光轴线与测量仪视光轴线的对位重合功能。
18.所述辅助对焦装置完成眼睛测量的焦点校对微调功能,是对焦趋于精准。
19.所述眼睛调节状态固定装置完成眼睛视标注视放松调节,眼睛状态固定功能。
20.所述参考光光程处理装置完成光学低相干干涉测量参考光的光程变换功能。
21.光学低相干干涉测量和屈光测量装置完成屈光度测量、光学干涉生物轴向测量的数据采集、结合屈光度配镜校正算法,预测近视风险等级算法,进行智能分析计算,测试结果输出功能。
22.所述屈光测量装置将红外线光源通过滤光片滤光,使光线成为不可见的红外光,从而使被检者看不到测试视标,红外线发射器发出红外线,通过光学部件照射到被测眼视网膜上,视网膜的反射光,经过光学系统投射到探测器上,将测得的光信号转变为电信号,与光阑输出的参考电信号进行比对,经过计算机的分析计算,得到被检眼睛的屈光数据。
23.所述光学低相干干涉测量装置将检测光源发出的光经过光纤耦合器,分为两束,一束进入眼睛(即信号光),另一束照射到反光镜,经过参考光光程处理装置形成参考光,从眼睛各结构层反射回来的信号光和反光镜反射回来的参考光进入光电探测器,进行干涉比较,经过计算机处理后可得到眼睛不同深度的位置信息。调节聚焦测试眼睛的不同部位,可测量出眼睛的轴向数据:角膜厚度、晶体厚度、眼轴长度、视网膜厚度。
24.计算机根据测量出的屈光数据和被测人员的年龄信息,调用眼睛调节力算法,分析计算出具有调节力系数的眼睛配镜度数。根据测量出的视轴长度、晶状体厚度数据,调用眼睛视轴长度、晶状体厚度的历史数据,调用近视风险评测算法分析计算出眼睛近视的风险等级,给出近视防控措施,形成近视风险等级预测和防控意见报告。
附图说明
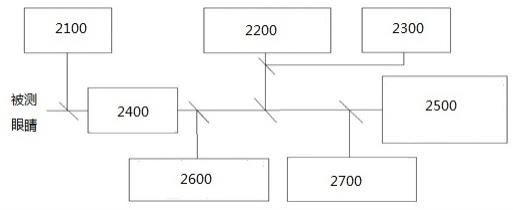
25.图1为本发明的结构示意框图;图2为本发明的光学传导测量部件结构示意框图;图3为本发明的计算机控制部件结构示意框图;
图4为本发明的光学系统部件结构示意图;图4中附图标记表示为:2101
‑
视轴位置调整陀螺;2102
‑
监视器;2103
‑
电荷耦合器;2104
‑
第十透镜;2105
‑
额托调整架;2201
‑
视网膜对焦光源;2202
‑
第一透镜;2203
‑
双光楔;2204
‑
狭缝;2205
‑
第三半透半反镜;2206
‑
第二透镜;2207
‑
ccd光耦合器;2208
‑
第一反射镜;2301
‑
视标光源;2302
‑
图形分划板;2303
‑
第一分光棱镜;2304
‑
第三透镜;2401
‑
聚焦透镜;2402
‑
第十一透镜;2501
‑
第一检测光源;2502
‑
第四透镜;2503
‑
第二反射镜;2504
‑
光栅转鼓;2505
‑
第二分光棱镜;2506
‑
第五透镜;2507
‑
光阑;2508
‑
第六透镜;2509
‑
光电探测器;2510
‑
第二检测光源;2511
‑
光纤;2512
‑
第一光纤准直器;2513
‑
第二光纤准直器;2514
‑
焦点联动器;2515
‑
第三反射镜;2516
‑
第一半透半反镜;2517
‑
第二半透半反镜;2601
‑
定位光源;2602
‑
第七透镜;2603
‑
第四半透半反镜;2604
‑
第四反射镜;2605
‑
环形孔板;2606
‑
第八透镜;2607
‑
十字形孔板;2608
‑
第九透镜;2609
‑
第五半透半反镜;2610
‑
第五反射镜;2701
‑
旋转棱镜;2702
‑
全反射镜;2703
‑
第六反射镜;2704
‑
第七反射镜;2705
‑
第八反射镜;2706
‑
第九反射镜。
26.图5为本发明的眼睛调节力算法流程图;图6 为本发明的近视风险评级数据算法表。
具体实施方式
27.下面结合附图1、附图2、附图3、附图4,附图5、附图6详细说明本发明的实施方式,但应当说明的是,这些实施方式并非对本发明的限制,本领域普通技术人员根据这些实施方式所作的功能、方法、或者结构上的等效变换或替代,均属于本发明的保护范围之内。
28.本实施例的一种多维检测仪,包括计算机控制电路100、光学传导测量部件200、输入输出部件300、电源供电电路400、机箱部件500。
29.所述计算机控制电路100的控制配置参见图3,包含有计算机中央处理器110、算法数据存储器120、光学系统部件控制驱动电路200、命令输入键盘310、报告输出打印机320、usb通信接口330、显示器340。
30.所述计算机中央处理器110为单片计算机处理器及典型外围配置电路,它构成了多维检测仪的控制中心,在驱动程序管理下控制整机各部件的工作流程和工作状态。
31.所述算法数据存储器120用于存储多维检测仪的眼睛屈光测量、轴向参数测量的计算方法,预测近视风险等级算法,青少年视力调节能力算法,是计算机中央处理器110单元的扩展数据程序存储器。
32.所述命令输入键盘310是多维检测仪的人工数据输入端,用于输入被测人员的年龄、性别、身份识别码等特征数据,命令输入键盘可以在设计中采用硬件按键、触摸屏软按键、多维检测仪扫码输入方式。
33.所述报告输出打印机320为内嵌式pos58打印机,作为多维检测仪输出数据的打印输出设备,也可配置usb接口,外接通用打印机,打印加入眼睛调节力系数的验光配镜单、眼睛近视风险评价报告、眼睛近视防控措施建议报告。
34.所述usb通信接口330为标准usb串行通信接口,实现测试数据的联网输出调用,通信接口可扩展增加rj45通用网络接口,为设备联网提供接口选项。通信接口电路采用通用usb电路、rj45通用网络接口电路,在计算机中央处理器110的控制下,调用通信接口驱动程
序完成接口通信。
35.所述显示器340为多维检测仪内嵌式液晶显示器,在计算机控制下动态显示被测眼睛的位置状态,为测量人员调整人机状态、确认结果提供可视化数据图像,显示测量结果、评价报告内容,为测试人员提供输出结果报告提供决策依据。
36.见附图2、附图4,所述光学系统部件控制驱动电路200包括眼睛定位装置2100、视网膜裂像对焦装置2200、固视装置2300、辅助对焦装置2400、光学低相干干涉测量和屈光测量装置2500、眼睛调节状态固定装置2600、参考光光程处理装置2700。
37.所述眼睛定位装置2100包括视轴位置调整陀螺2101、监视器2102、电荷耦合器2103、第十透镜2104、额托调整架2105,完成眼睛定位功能。该系统的作用是保证被测眼的眼轴与仪器的光轴基本重合,为准确测量做准备。其工作过程是,操作者通过观看监视器2102,指挥被测人员将头部放置于额托调整架2105上,额托调整架可以进行位置调整,眼睛图像通过电荷耦合器2103转换为电信号在监视器2102上显示,检测仪通过视轴位置调整陀螺2101装置可以调整检测仪位置和方向,进而调节检测仪光轴位置,便于被测眼睛视轴与检测仪光轴的基本重合。
38.所述视网膜裂像对焦装置2200包括视网膜对焦光源2201、第一透镜2202、双光楔2203、狭缝2204、第三半透半反镜2205、第二透镜2206、ccd光耦合器2207、第一反射镜2208组成,完成眼睛视网膜表面聚焦定位功能。其工作过程是,视网膜对焦光源2201发出的光线,经第一透镜2202、双光楔2203、狭缝2204、第三半透半反镜2205、第一反射镜2208,聚焦于眼睛视网膜形成双裂像,当对焦光斑聚焦于视网膜时,在视网膜上形成的双裂像对齐,否则双裂像会错位,从视网膜返回的双裂像通过第二透镜2206成像于ccd光耦合器2207上转换为电信号,经计算机处理后成像于监视器,供操作人员监控调整。
39.所述固视装置2300包括视标光源2301、图形分划板2302、第一分光棱镜2303、第三透镜2304,完成眼睛视轴与测量仪光轴的重合对位功能。其工作过程是,视标光源2301发出的光照射在图形分划板2302上,将图形分划板上的图形映射到第一分光棱镜2303上,再经第三透镜2304、第二半透半反镜2517,使眼睛看到一个远方视标图形,形成眼睛固定注视。
40.所述辅助对焦装置2400包括聚焦透镜2401、第十一透镜2402组成,用于屈光不正患者,调节两个透镜的位置,使探测光聚焦到视网膜表面的功能。其工作过程是,对屈光正常的眼睛,聚焦透镜2401、第十一透镜2402两个透镜的焦点和眼睛视轴重合一线,对屈光不正的眼睛,微调两个透镜的位置,能够使眼睛视轴线与仪器视轴线重合一线,使探测光聚焦到视网膜表面中心位置。
41.所述眼睛调节状态固定装置2600包括定位光源2601、第七透镜2602、第四半透半反镜2603、第四反射镜2604、环形孔板2605、第八透镜2606、十字形孔板2607、第九透镜2608、第五半透半反镜2609、第五反射镜2610,完成眼睛测量部位聚焦定位功能。该装置的作用是保证被测眼的眼轴与仪器的光轴重合,并保持测量物镜的物方焦点离角膜顶点位置适宜,以保证验光的准确性。工作过程是定位光源2601发出光斑,通过第七透镜2602、第四半透半反镜2603形成两条光路,第一条光路通过十字形孔板2607,第九透镜2608,形成十字图像,第二条光路通过第四反射镜2604、环形孔板2605、第八透镜2606,形成环形图像,十字图像和环形图像通过光轴照射在被测眼睛,其反射光被电荷耦合器2103、监视器2102接收,在监视器看到的情况是,眼睛视轴与检测仪光轴重合时,十字图像和环形图像重合,否则调
整两条光路,使十字图像和环形图像重合,达到眼睛视轴与检测仪光轴重合。
42.所述光学低相干干涉测量和屈光轴向测量装置2500是检测仪的主要光电部件,包括第一检测光源2501、第四透镜2502、第二反射镜2503、光栅转鼓2504、第二分光棱镜2505、第五透镜2506、光阑2507、第六透镜2508、光电探测器2509、第二检测光源2510、光纤2511、第一光纤准直器2512、第二光纤准直器2513、焦点联动器2514、第三反射镜2515、第一半透半反镜2516、第二半透半反镜2517,完成眼睛屈光参数、眼睛晶体厚度、眼轴长度等参数的测量功能。
43.进行眼屈光测量时,第一检测光源2501发出的光斑,经过第四透镜2502、第二反射镜2503,照射有许多相等空隙的光栅转鼓2504(该转鼓即为测试视标)产生光斑,经转鼓中的第二分光棱镜2505,又经第一半透半反镜2516,进入被测眼睛,当转鼓绕仪器光轴匀速旋转时,将在被测眼底形成匀速移动的光斑。光斑由被测眼眼底投出,又经过第五透镜2506、光阑2507,被光电探测器2509接收,光电探测器将接收到的光信号变为电信号。根据光电探测器2509上采集的电信号推断成像面与光阑2507的位置关系,从而判断人眼的屈光状态。再进一步推算出被测眼应配戴的矫正镜片的度数。这一系列分析、换算、判断过程均由计算机完成,最后直接显示结果。根据眼睛反射影像与参考光阑形成的位置关系,通过计算机分析计算,给出正视眼、近视眼、远视眼的屈光度数。计算机根据被测人员的年龄、眼睛参差数据,依据眼睛调节力补偿算法计算出眼睛调节力度数,智能输出具有调节力系数的眼睛屈光度数。
44.眼睛调节力补偿算法见流程图5。具体为:读取年龄信息、散瞳前验光数据、眼睛正位、内斜、外斜数据,由散瞳后验光数据判读眼睛度数,含散光度数,判定参差情况,当正眼位时,按年龄和屈光度查正位外斜经验数据表取得校正系数,由查取的屈光校正系数、散光校正系数与散瞳后的验光数据相加,计算出调节后的验光结果,输出校正验光配镜报告。当外斜时,按年龄和屈光度查正位外斜经验数据表取得校正系数,由查取的屈光校正系数、散光校正系数与散瞳后的验光数据相加,计算出调节后的验光结果,输出校正验光配镜报告。当内斜时,查内斜经验数据表取得校正系数,由查取的屈光校正系数、散光校正系数与散瞳后的验光数据相加,计算出调节后的验光结果,输出校正验光配镜报告。当有参差时,度数小的眼睛调节系数置为零值,度数大的眼睛查正位外斜经验数据表取得校正系数,由查取的屈光校正系数、散光校正系数与散瞳后的验光数据相加,计算出调节后的验光结果,输出校正验光配镜报告。无参差时,按年龄和屈光度查正位外斜经验数据表取得校正系数,由查取的屈光校正系数、散光校正系数与散瞳后的验光数据相加,计算出调节后的验光结果,输出校正验光配镜报告。
45.进行角膜厚度、前房深度、晶体厚度、眼轴长度、视网膜厚度测量时,第二检测光源2510发出的光斑,经过光纤2511、第一光纤准直器2512、焦点联动器2514、辅助聚焦透镜2401、第十一透镜2402到达眼睛后形成反射光斑,到达光电探测器2509后,与参考光程处理装置2700产生的参考光斑进行比对,利用反射光斑与参考光斑的相位差,可计算出眼睛反射面的深度值。焦点联动器2514是一个可转动的圆盘,盘上有3个透镜使探测光分别在视网膜、晶状体、角膜产生聚焦,焦点联动器2514也有3个透镜对应视网膜、晶状体、角膜参考光通路,对应控制旋转棱镜2701的旋转位置,通过全反射镜2702、第六反射镜2703、第七反射镜2704、第八反射镜2705、第九反射镜2706产生参考光斑,与探测光斑比对计算,可测量出
晶状体厚度、眼轴长度等参数。在命令输入键盘310输入或调用眼睛调节力系数、眼轴长度、晶状体厚度数据,计算机依据近视风险等级预测算法给出精准的近视风险判断和防控治疗方案,本发明将近视风险划分为0近视风险、轻度近视风险、中度近视风险、重度近视风险4各级别,给出防控建议方案。
46.近视风险等级预测算法表见图6。
47.本发明的特点:1. 一机完成屈光度、眼轴长度、晶状体厚度测量;2. 智能推送儿童青少年潜在视力调节力系数的验光配镜方案,大规模减少误配眼镜度数对眼睛视力的伤害。
48.3.智能推送青少年近视风险等级和个性化近视防控方案。
49.上文所列出的一系列的详细说明仅仅是针对本发明的可行性实施方式的具体说明,它们并非用以限制本发明的保护范围,凡未脱离本发明技艺精神所作的等效实施方式或变更均应包含在本发明的保护范围之内。
50.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明的目的。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

