1.本发明涉及一种骨槽减压机头设备,尤其涉及一种脊柱微创手术机器人用升降式骨槽减压机头设备。
背景技术:
2.近年来,脊柱外科领域取得了一些重大进展,椎间盘突出症手术治疗的方式将发生革命性的变化:以“切除”突出椎间盘为主要治疗手段的模式将进入以“保留”突出椎间盘令其自然吸收为主的模式。文献报道人工方式进行脊柱双开式扩大成形术(cmel)可广泛“诱导”突出椎间盘发生自然吸收(rhnp)现象,吸收比可达81.3%,吸收率达到100%。但人工方式进行脊柱双开式扩大成形术(cmel)存在切口较大、手术操作尤其是钢板安装较为繁琐的问题,影响这一新技术的推广。尽管脊柱手术机器人在临床上已获得了成功应用,包括以色列的mazor脊柱助理人、韩国的spinebot脊柱机器人、美国的mazor x脊柱手术机器人、我国的天玑脊柱手术机器人等,但它们基本都是采用术中x线图像与术前ct图像配准的方式,仅能用于椎弓根钉置入,功能十分单一。目前尚未见有能够完成cmel术式、实现椎管双开式减压、棘突韧带复合体后移扩大、从而能“诱导”突出椎间盘发生广泛自然吸收(rhnp)的脊柱微创手术机器人。
3.有鉴于上述的缺陷,本设计人,积极加以研究创新,以期创设一种脊柱微创手术机器人用垂直调节式骨槽减压机头设备,使其更具有产业上的利用价值。
技术实现要素:
4.为解决上述技术问题,本发明的目的是提供一种脊柱微创手术机器人用升降式骨槽减压机头设备。
5.本发明的一种脊柱微创手术机器人用升降式骨槽减压机头设备,包括有机头连接座,其中:所述机头连接座上设置有台阶状空腔,所述台阶状空腔内安装有伸缩引导装置,所述伸缩引导装置包括伸缩柱,所述台阶状空腔内和伸缩柱之间设置有调节空间,所述调节空间的上端设置有上伸缩弹簧,所述调节空间的下端设置有下伸缩弹簧,所述伸缩柱的下方设有工作通道,所述伸缩柱的上端连接有固定板,所述固定板上安装有切骨动力装置及其配合使用的升降调节机构,所述工作通道内设置有手术器件。
6.进一步地,上述的一种脊柱微创手术机器人用升降式骨槽减压机头设备,其中,所述升降调节机构包括有电机,所述电机上设有丝杆组件,所述固定板的上端通过导向柱套设有活动连接板11,所述丝杆组件与活动连接板11相连,所述切骨动力装置与活动连接板11相连。
7.更进一步地,上述的一种脊柱微创手术机器人用升降式骨槽减压机头设备,其中,所述机头连接座上安装有夹片,所述夹片上设置有主刻度线,所述工作通道上设置有副刻度线。
8.更进一步地,上述的一种脊柱微创手术机器人用升降式骨槽减压机头设备,其中,
所述伸缩柱上安装有内窥镜。
9.更进一步地,上述的脊柱微创手术机器人用升降垂直调节式骨槽减压机头设备,其中,所述伸缩柱与固定板的结合处设置有夹持开口,手术器件的尾段穿出夹持开口并受到夹持开口限位。
10.更进一步地,上述的一种脊柱微创手术机器人用升降式骨槽减压机头设备,其中,所述手术器件包括有电刀和吸引器,所述电刀的下端为钩状构造。
11.再进一步地,上述的一种脊柱微创手术机器人用升降式骨槽减压机头设备,其中,所述机头连接座通过锁紧螺丝与机头固定座20相连。
12.借由上述方案,本发明至少具有以下优点:
13.1、通过夹片与工作通道相互配合,可以构成夹子构造,便于使用期间夹紧棘突进行定位,以棘突为参照确定双侧骨槽的位置。
14.2、通过夹片的顶点,可以让机头绕x轴旋转,参照夹片上设置的主刻度线和工作通道上设置有副刻度线,判断机头与人体的骨头是否垂直,便于提升手术精度。
15.3、电刀的下端设置有钩状构造,能自动指示切骨的深度。同时,能钩在骨头(椎板)下面,随上、下伸缩弹簧可“浮动”自动指示切骨的深度,切骨动力装置按一定行程和一定频率升降磨透骨质,就能在椎板上安全开出骨槽实现减压。
16.4、通过台阶状空腔与相应的伸缩弹簧配合,伸缩柱和电刀的下端设置有钩状构造可以自动适应骨头下表面高度变化,伸缩柱、电刀和切骨动力装置一并上下浮动,切骨动力装置按一定行程一定频率升降磨透骨质,随机头绕y轴按一定时间间隔一定距离旋转,切骨动力装置和机头交替动作可实现骨槽减压并保证手术操作安全。
17.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。
附图说明
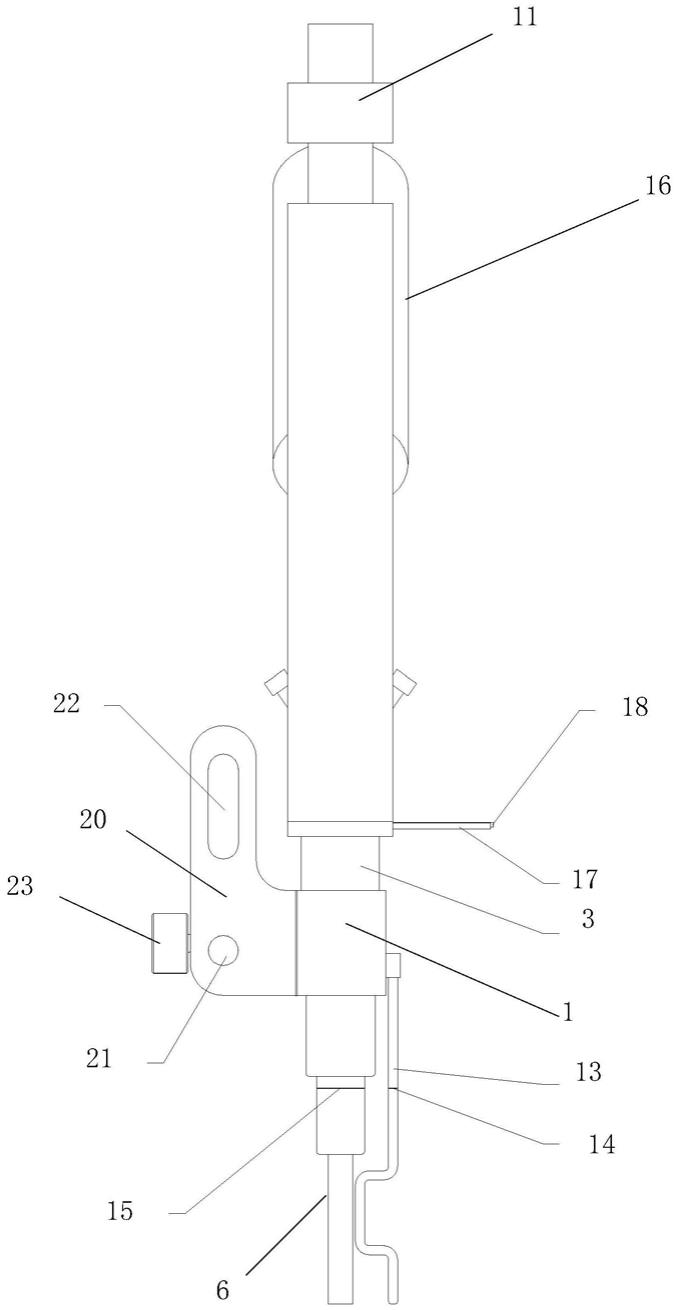
18.图1是本脊柱微创手术机器人用升降式骨槽减压机头设备的左侧构造示意图。
19.图2是本脊柱微创手术机器人用升降式骨槽减压机头设备的右侧局部剖面结构示意图。
20.图3是本脊柱微创手术机器人用升降式骨槽减压机头设备的正面局部剖面结构示意图。
21.图4是电刀、吸引器工作状态示意图。
22.图中各附图标记的含义如下。
23.1 机头连接座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2 台阶状空腔
24.3 伸缩柱
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4 上伸缩弹簧
25.5 下伸缩弹簧
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6 工作通道
26.7 固定板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8 电机
27.9 丝杆组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10 导向柱
28.11 活动连接板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12 切骨动力装置
29.13 夹片
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14 主刻度线
30.15 副刻度线
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
16 内窥镜
31.17 电刀
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
18 吸引器
32.19 钩状构造
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20 机头固定座
33.21 下转轴孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22 上转轴孔
34.23 锁紧螺丝
具体实施方式
35.下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
36.如图1至4的一种脊柱微创手术机器人用升降式骨槽减压机头设备,包括有机头连接座1,其与众不同之处在于:为了实现稳定的导向收纳,在机头连接座1上设置有台阶状空腔2,台阶状空腔2内安装有伸缩引导装置。具体来说,本发明所采用的伸缩引导装置包括伸缩柱3,台阶状空腔2内和伸缩柱3之间设置有调节空间。同时,调节空间的上端设置有上伸缩弹簧4,调节空间的下端设置有下伸缩弹簧5。由此,通过两组伸缩弹簧实现有效的定位与缓冲。并且,伸缩柱3的下方设有工作通道6,便于使用期间工作通道6通过两组伸缩弹簧的压缩可以很好的阻挡软组织,防止软组织进入通道内。再者,为了实现使用期间的切骨动力装置12升降,本发明在伸缩柱3的上端连接有固定板7,固定板7上安装有切骨动力装置12及其配合使用的升降调节机构,工作通道6内设置有手术器件。
37.结合本发明一较佳的实施方式来看,为了实现持续稳定的升降运转,升降调节机构包括有电机8,电机8上设有丝杆组件9。同时,配合丝杆组件9的运转实现导向,本发明在固定板7的上端通过导向柱10套设有活动连接板11,丝杆组件9与活动连接板11相连。并且,考虑到切骨动力装置12也可以实现同步的高度调整,切骨动力装置12与活动连接板11相连。
38.进一步来看,机头连接座1上安装有夹片13,夹片13上设置有主刻度线14,工作通道6上设置有副刻度线15。这样,夹片13与工作通道6的下端可以构成夹子构造,可以夹紧棘突进行定位,用于后续的判断骨槽位置。并且,依托于主刻度线14、副刻度线15的相互配合,可以满足有效的位置参考标定,提供精确的作业点,保证机头与椎骨表面垂直。
39.结合实际实施来看,为了便于操作者看到清晰的手术操作面,可以实现有效的人工干预,在机器人自主操作的前提下根据当前手术情况进行细微的参数调整,本发明可在伸缩柱3上安装有内窥镜16。
40.同时,考虑到手术器件可以与外部组件对接,满足牵开、吸引等各种功能配置需要,伸缩柱3与固定板7的结合处设置有夹持开口(由于其实际开口很小,所以图中未示出),手术器件的尾段穿出夹持开口并受到夹持开口限位。这样,通过夹持开口限位,可以让位于工作通道6内的手术器件伴随伸缩柱3的上下移动进行同步运动。
41.再进一步来看,考虑到常规脊柱微创手术的实施需要,采用的手术器件包括有电刀17和吸引器18,电刀17的下端为钩状构造19。这样,能够精确的指示当前的切骨深度,便于机器人的自适应定位。
42.结合实际装配来看,考虑到根据不同的手术需求进行便捷化的替换,本发明在机头连接座1的一侧通过连接螺栓连接有机头固定座20。实际使用期间,可以利用锁紧螺丝23将机头连接座1与基于夹式定位的隧道式钢板安装脊柱微创手术机器人的机头固定座20锁
紧。这样,可以实现便捷化的替换使用。当然,针对不同的构造或是实现方式,也可以采用螺钉、连杆、磁吸等方式,但凡可以实现机头连接座1与机头固定座20结合的构造都可以被采纳,在此不再赘述。同时,也可以在某些极端方式直接将机头连接座1与机器人对接相连。
43.本发明的工作原理如下:
44.通过工作通道6与夹片13构成一个类似夹子的构造,能够有效夹紧人椎骨的棘突。这样,可以利用棘突边缘实现左右减压骨槽的定位。以夹片13顶点为支点,让机头绕x轴旋转,依托于主刻度线14、副刻度线15的相互配合,判断机头与人体的骨头(椎板表面)是否垂直。在工作期间,依托于电刀17的钩状构造19,可以钩在骨头(椎板)的下方。由此,能自动指示切骨的深度。
45.并且,机头由于具有上伸缩弹簧4、下伸缩弹簧5,当机头绕y轴旋转时,如骨头的下表面变深,骨头的下表面挤压电刀17的钩状构造19,上伸缩弹簧4、下伸缩弹簧5即被压缩。否则,骨头的下表面变浅时,上伸缩弹簧4、下伸缩弹簧5将电刀17的钩状构造19顶起,令伸缩柱3可自动上下“浮动”。这样,能够令电刀17的钩状构造19始终与骨的下表面紧贴,可自动适应骨的高度变化。由此,切骨动力装置12刀杆按一定行程一定频率升降,随机头绕y轴按一定时间间隔和一定距离旋转,切骨动力装置12和机头交替动作可实现骨槽减压并保证手术操作安全。
46.通过上述的文字表述并结合附图可以看出,采用本发明后,拥有如下优点:
47.1、通过夹片与工作通道相互配合,可以构成夹子构造,便于使用期间夹紧棘突进行定位,以棘突为参照确定双侧骨槽的位置。
48.2、通过夹片的顶点,可以让机头绕x轴旋转,参照夹片上设置的主刻度线和工作通道上设置有副刻度线,判断机头与人体的骨头是否垂直,便于提升手术精度。
49.3、电刀的下端设置有钩状构造,能自动指示切骨的深度。同时,能钩在骨头(椎板)下面,随上、下伸缩弹簧可“浮动”自动指示切骨的深度,切骨动力装置按一定行程和一定频率升降磨透骨质,就能在椎板上安全开出骨槽实现减压。
50.4、通过台阶状空腔与相应的伸缩弹簧配合,伸缩柱和电刀的下端设置有钩状构造可以自动适应骨头下表面高度变化,伸缩柱、电刀和切骨动力装置一并上下浮动,切骨动力装置按一定行程一定频率升降磨透骨质,随机头绕y轴按一定时间间隔一定距离旋转,切骨动力装置和机头交替动作可实现骨槽减压并保证手术操作安全。
51.此外,本发明所描述的指示方位或位置关系,均为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或构造必须具有特定的方位,或是以特定的方位构造来进行操作,因此不能理解为对本发明的限制。
52.术语“主”、“副”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“主”、“副”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“若干”的含义是两个或两个以上,除非另有明确具体的限定。
53.同样,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
54.在本发明中,除非另有明确的规定和限定,术语“连接”、“设置”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个组件内部的连通或两个组件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。并且它可以直接在另一个组件上或者间接在该另一个组件上。当一个组件被称为是“连接于”另一个组件,它可以是直接连接到另一个组件或间接连接至该另一个组件上。
55.需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或组件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
56.以上所述仅是本发明的优选实施方式,并不用于限制本发明,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

