1.本实用新型涉及磁瓦领域,尤其涉及一种磁瓦智能磨边装置。
背景技术:
2.随着永磁材料的迅猛发展,永磁材料逐渐进入现代工业生产的各个领域。磁瓦常用作永磁电机的励磁,是将锶铁氧体作为原料,经过搅拌、压模、烧制、打磨、测量、筛选、充磁和复检包装等工艺流程后,制成瓦片状的磁体。
3.打磨是调节磁胚规格和评级的必要手段,传统打磨工艺,需采用多台不同的设备,针对不同面,重复多次打磨。打磨精度控制难度大,需要频繁调整磨片和磁胚间距,严重影响生产效率;现有流水线打磨工艺,打磨流程速度受到传输速度影响,打磨效果参差不齐,严重影响后续磁瓦的装配和调试。
技术实现要素:
4.本实用新型提出了一种磁瓦智能磨边装置,解决了现有打磨工艺打磨精度低、磨片需要手动调整和打磨效果不佳问题。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种磁瓦智能磨边装置,包括主体框架、进料调整区部分、磨边工作主体区部分、检测判定区部分和智能控制部分。
7.所述主体框架包括加工区框架和打磨动力区框架。
8.所述加工区框架为一长方体中空容器一,加工区框架前侧板设置三个长方形通孔一和若干个透气孔,长方形通孔一上合页连接防护门。
9.所述加工区框架左侧板设置一长方形通孔二。
10.所述加工区框架右侧板设置一长方形通孔三。
11.所述加工区框架后侧板设置一圆形通孔一、一长方形通孔四和若干个透气孔。
12.所述加工区框架内通过安装架设置磁瓦轨道组一和磁瓦轨道组二。
13.所述磁瓦轨道组一包括两个“j”形滑管一,两个“j”形滑管一相对设置于安装架上;“j”形滑管一左端位于长方形通孔二上。
14.所述磁瓦轨道组二包括两个“j”形滑管二,两个“j”形滑管二相对设置于安装架上;“j”形滑管二右端位于长方形通孔三上。
15.所述打磨动力区框架为一长方体中空容器二,长方体中空容器二下底板上设置四个缓冲支柱,长方体中空容器二前侧板设置圆形通孔三,长方体中空容器二后侧板上等距设置若干个透气孔。
16.所述进料调整区部分包括推杆电机一和“回”字形闸。
17.所述推杆电机一设置于加工区框架上底板内壁上。
18.所述“回”字形闸设置于推杆电机一的活动端,“回”字形闸内圈设置斜坡,“回”字形闸滑动连接于磁瓦轨道组一右端。
19.所述磨边工作主体区部分包括坐标控制装置和打磨装置。
20.所述坐标控制装置包括动力区结构和限位结构。
21.所述动力区结构包括电动升降装置、连接座、推杆电机二和连接轨道组一。
22.所述电动升降装置设置于加工区框架下底板上,电动升降装置的活动端设置连接座。
23.所述连接座包括底板一、底板二和复位弹簧;底板一和底板二上设置定位销孔,底板一和底板二通过销柱滑动链接,复位弹簧滑动连接于销柱上,且复位弹簧位于底板一和底板二之间。
24.推杆电机二设置于连接座上端,推杆电机二的活动端上设置条形基板一。
25.所述连接轨道组一可拆卸连接于条形基板一上,连接轨道组一包括“j”形滑管三,“j”形滑管三右端设置一斜坡。
26.所述限位结构包括直线步进电机、限位块和定位滑柱。
27.所述直线步进电机通过安装架设置于加工区框架上底板内壁上。
28.所述限位块上端设置于直线步进电机上,限位块的下端设置“u”形通槽,“u”形通槽和条形基板一相适配。
29.所述定位滑柱设置于加工区框架下底板上。
30.所述限位块和条形基板一通过半圆形滑块和定位滑柱滑动连接。
31.所述打磨装置包括伺服电机、变速齿轮箱和磨盘。
32.所述伺服电机设置于打磨动力区框架内,伺服电机的转轴穿过圆形通孔二。
33.所述变速齿轮箱设置于加工区框架后侧板上,变速齿轮箱输出轴穿过圆形通孔一,变速齿轮箱输入轴设置于伺服电机的转轴上。
34.所述磨盘设置于变速齿轮箱的输出轴上。
35.所述检测判定区部分包括判定结构和筛选结构。
36.所述判定结构包括推杆电机三、检测块和距离传感器。
37.所述推杆电机三设置于加工区框架上底板内壁上。
38.所述检测块设置于推杆电机三的活动端上,检测块为长方体一,长方体一下底面设置一个“u”形开口通槽,长方体一上底面等距设置若干个圆形通孔三,长方体一的前侧面和后侧面上均设置两个圆形螺孔,圆形螺孔均螺栓连接于调节螺杆,调节螺杆另一端销轴连接于一限位条上。
39.所述距离传感器设置于圆形通孔三内。
40.所述筛选结构包括推杆电机四、推杆电机五、电磁铁、“u”形滑管和连接轨道组二。
41.所述推杆电机四设置于加工区框架下底板上,推杆电机四的活动端上设置条形基板二。
42.所述推杆电机五设置于加工区框架后侧板内壁上。
43.所述电磁铁设置于推杆电机五的活动端上。
44.所述“u”形滑管通过安装架设置于加工区框架下底板上,且“u”形滑管位于推杆电机五的下方。
45.所述连接轨道组二可拆卸连接于条形基板二上,连接轨道组二包括“j”形滑管四,“j”形滑管四短于条形基板二。
46.所述智能控制部分包括微处理器、触摸传感器模块一、触摸传感器模块二、触摸传感器模块三、光电计数传感器和蜂鸣器。
47.所述触摸传感器模块一、触摸传感器模块二、触摸传感器模块三和蜂鸣器设置于加工区框架前侧板外侧壁上。
48.所述微处理器设置于加工区框架内。
49.所述光电计数传感器设置于“u”形滑管上。
50.所述推杆电机一、电动升降装置、推杆电机二、直线步进电机、伺服电机、推杆电机三、距离传感器、推杆电机四、推杆电机五、电磁铁、触摸传感器模块一、触摸传感器模块二、触摸传感器模块三、光电计数传感器、蜂鸣器和微处理器之间电性连接。
51.进一步,增设红外避障传感器于条形基板一,红外避障传感器与微处理器电性连接。
52.进一步,增设喷水设备和干燥设备于加工区框架。
53.相对于现有技术的有益效果:
54.本实用新型中,通过主体框架、进料调整区部分、磨边工作主体区部分、检测判定区部分和智能控制部分的一体化设置,实现了磁瓦全自动打磨,打磨速度均匀,打磨精度得到显著改善,全自动调节磨盘和磁瓦间距,节省调整时间,显著提高打磨效率。
附图说明
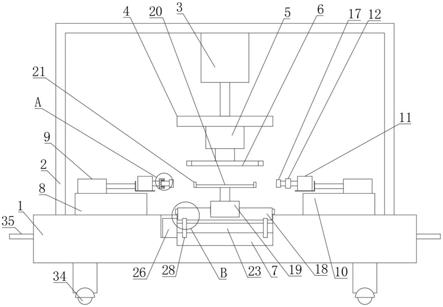
55.图1为本实用新型正视局部剖面结构示意图;
56.图2为本实用新型俯视结构示意图。
57.图中:101. 加工区框架、102. 长方形通孔二、103. 长方形通孔三、104. 长方形通孔四、105.
ꢀ“
j”形滑管一、106.
ꢀ“
j”形滑管二、107. 打磨动力区框架、201. 推杆电机一、202.
ꢀ“
回”字形闸、301. 电动升降装置、302. 连接座、303. 推杆电机二、304. 条形基板一、305.
ꢀ“
j”形滑管三、306. 直线步进电机、307. 限位块、308. 定位滑柱、309.变速齿轮箱、310.磨盘、401.推杆电机三、402.检测块、403. 限位条、404.推杆电机四、405.推杆电机五、406.“u”形滑管、407. 条形基板二、408.
ꢀ“
j”形滑管四。
具体实施方式
58.以下结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
59.实施例1,参照附图1
‑
2,一种磁瓦智能磨边装置,包括主体框架、进料调整区部分、磨边工作主体区部分、检测判定区部分和智能控制部分。
60.所述主体框架包括加工区框架101和打磨动力区框架107。
61.所述加工区框架101为一长方体中空容器一,加工区框架101前侧板设置三个长方形通孔一和若干个透气孔,长方形通孔一上合页连接防护门。
62.所述加工区框架101左侧板设置一长方形通孔二102。
63.所述加工区框架101右侧板设置一长方形通孔三103。
64.所述加工区框架101后侧板设置一圆形通孔一、一长方形通孔四104和若干个透气孔。
65.所述加工区框架101内通过安装架设置磁瓦轨道组一和磁瓦轨道组二。
66.所述磁瓦轨道组一包括两个“j”形滑管一105,两个“j”形滑管一105相对设置于安装架上;“j”形滑管一105左端位于长方形通孔二102上。
67.所述磁瓦轨道组二包括两个“j”形滑管二106,两个“j”形滑管二106相对设置于安装架上;“j”形滑管二106右端位于长方形通孔三103上。
68.所述打磨动力区框架107为一长方体中空容器二,长方体中空容器二下底板上设置四个缓冲支柱,长方体中空容器二前侧板设置圆形通孔三,长方体中空容器二后侧板上等距设置若干个透气孔。
69.所述进料调整区部分包括推杆电机一201和“回”字形闸202。
70.所述推杆电机一201设置于加工区框架101上底板内壁上。
71.所述“回”字形闸202设置于推杆电机一201的活动端,“回”字形闸202内圈设置斜坡,“回”字形闸202滑动连接于磁瓦轨道组一右端。
72.所述磨边工作主体区部分包括坐标控制装置和打磨装置。
73.所述坐标控制装置包括动力区结构和限位结构。
74.所述动力区结构包括电动升降装置301、连接座302、推杆电机二303和连接轨道组一。
75.所述电动升降装置301设置于加工区框架101下底板上,电动升降装置301的活动端设置连接座302。
76.所述连接座302包括底板一、底板二和复位弹簧;底板一和底板二上设置定位销孔,底板一和底板二通过销柱滑动连接,复位弹簧滑动连接于销柱上,且复位弹簧位于底板一和底板二之间。
77.推杆电机二303设置于连接座302上端,推杆电机二303的活动端上设置条形基板一304。
78.所述连接轨道组一可拆卸连接于条形基板一304上,连接轨道组一包括“j”形滑管三305,“j”形滑管三305右端设置一斜坡。
79.所述限位结构包括直线步进电机306、限位块307和定位滑柱308。
80.所述直线步进电机306通过安装架设置于加工区框架101上底板内壁上。
81.所述限位块307上端设置于直线步进电机306上,限位块307的下端设置“u”形通槽,“u”形通槽和条形基板一304相适配。
82.所述定位滑柱308设置于加工区框架101下底板上。
83.所述限位块307和条形基板一304通过半圆形滑块和定位滑柱308滑动连接。
84.所述打磨装置包括伺服电机、变速齿轮箱309和磨盘310。
85.所述伺服电机设置于打磨动力区框架107内,伺服电机的转轴穿过圆形通孔二。
86.所述变速齿轮箱309设置于加工区框架101后侧板上,变速齿轮箱309输出轴穿过圆形通孔一,变速齿轮箱309输入轴设置于伺服电机的转轴上。
87.所述磨盘310设置于变速齿轮箱309的输出轴上。
88.所述检测判定区部分包括判定结构和筛选结构。
89.所述判定结构包括推杆电机三401、检测块402和距离传感器。
90.所述推杆电机三401设置于加工区框架101上底板内壁上。
91.所述检测块402设置于推杆电机三401的活动端上,检测块402为长方体一,长方体一下底面设置一个“u”形开口通槽,长方体一上底面等距设置若干个圆形通孔三,长方体一的前侧面和后侧面上均设置两个圆形螺孔,圆形螺孔均螺栓连接于调节螺杆,调节螺杆另一端销轴连接于一限位条403上。
92.所述距离传感器设置于圆形通孔三内。
93.所述筛选结构包括推杆电机四404、推杆电机五405、电磁铁、“u”形滑管406和连接轨道组二。
94.所述推杆电机四404设置于加工区框架101下底板上,推杆电机四404的活动端上设置条形基板二407。
95.所述推杆电机五405设置于加工区框架101后侧板内壁上。
96.所述电磁铁设置于推杆电机五405的活动端上。
97.所述“u”形滑管406通过安装架设置于加工区框架101下底板上,且“u”形滑管406位于推杆电机五405的下方。
98.所述连接轨道组二可拆卸连接于条形基板二407上,连接轨道组二包括“j”形滑管四408,“j”形滑管四408短于条形基板二407。
99.所述智能控制部分包括微处理器、触摸传感器模块一、触摸传感器模块二、触摸传感器模块三、光电计数传感器和蜂鸣器。
100.所述触摸传感器模块一、触摸传感器模块二、触摸传感器模块三和蜂鸣器设置于加工区框架101前侧板外侧壁上。
101.所述微处理器设置于加工区框架101内。
102.所述光电计数传感器设置于“u”形滑管406上。
103.所述推杆电机一201、电动升降装置301、推杆电机二303、直线步进电机306、伺服电机、推杆电机三401、距离传感器、推杆电机四404、推杆电机五405、电磁铁、触摸传感器模块一、触摸传感器模块二、触摸传感器模块三、光电计数传感器、蜂鸣器和微处理器之间电性连接。
104.工作原理及使用方法:
105.预设置:
106.工作人员将采集框分别放置到“u”形滑管406和长方形通孔三103下方。
107.工作人员将配套的自动送料振动盘安装到加工区框架101左端,并通过连接通道与磁瓦轨道组一连接。
108.调整磁瓦轨道组一、磁瓦轨道组二、连接轨道组一、连接轨道组二和限位条403间距与待加工磁胚相适配,并对本装置进行空载试运行。
109.调整推杆电机二303和直线步进电机306的运行行程。
110.运行:
111.将待加工磁胚倒入自动送料振动盘,启动自动送料振动盘,并触摸一次触摸传感器模块一,触摸传感器模块一输出信号给微处理器,微处理器输出信号给推杆电机一201和推杆电机二303,推杆电机一201和推杆电机二303按照预设程序进行往复运动。
112.磁胚在自动送料振动盘的作用下被推入磁瓦轨道组一右端,由于“回”字形闸202限制,停止前移。每隔一段时间“回”字形闸202下移2s(可调节),使磁胚进入连接轨道组一;
磁胚被运行至连接轨道组一右端,由于推杆电机二303按照预设程序进行往复运动,磁胚被带至磨盘310下进行打磨。
113.打磨后的磁胚在后续磁胚的推动下进入接轨道组二。磁胚运行至连接轨道组二右端,并进入检测块402内,距离传感器输出信号给微处理器,微处理器将所得数值和预设数值进行对比后,根据结果不同输出不同信号。
114.信号一,符合预设数值中合格品标准,微处理器输出信号给推杆电机三401,推杆电机三401上移一个单位,2s(可调节)后复位,让该磁胚进入磁瓦轨道组二,进入合格品采集框。
115.信号二,不符合预设数值中合格品标准,微处理器输出信号给推杆电机四404、推杆电机五405和电磁铁,推杆电机四404下移一段距离,之后推杆电机五405前移一段距离,电磁铁延时启动,推杆电机五405复位,此时,电磁铁关闭,磁胚进入“u”形滑管406,进入不合格品采集框。同步,光电计数器传输信号给微处理器。
116.信号三,符合预设数值空载,则继续打磨流程。
117.当信号二的状况连续出现两次,则微处理器输出信号给电动升降装置301和直线步进电机306,电动升降装置301和直线步进电机306均上移一段距离。
118.当信号二状况连续出现五次,则微处理器输出信号给蜂鸣器,蜂鸣器进行间断性鸣叫,提醒操作人员进行人工干预处理。
119.当光电计数传感器计数达到预设上限数值,微处理器输出信号给蜂鸣器,蜂鸣器长鸣,提醒操作人员进行后续操作,具体为将不合格磁胚再次倒入自动送料振动盘内。
120.实施例2,在实施例1的基础上,增设红外避障传感器于条形基板一304,红外避障传感器与微处理器电性连接,使得设备运行更智能,节约能源。
121.实施例3,在实施例1的基础上,增设喷水设备和干燥设备于加工区框架101,优化打磨效果,同时减少颗粒物的飞溅。
122.以上,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
123.本实用新型未涉及部分均采用现有技术得以实现。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。