1.本实用新型涉及眼睛度数矫正技术领域,尤其涉及一种自适应智能眼镜。
背景技术:
2.当前,由于不良的用眼习惯,人群中近视眼群体每年都在不断提升,尤其是学生群体,由于长时间的面对黑板或近距离地读书写字,导致眼镜不能得到很好的调节,进而造成近似眼。现阶段解决的主要手段是佩戴近视眼镜,近视镜可以使远物的离焦像平面变得更远些回到视网膜上成像。但是当人们戴着近视镜看近物时,近物的成像焦平面却落在了视网膜后面而产生了新的离焦,为了看清近物,大脑、视网膜自适应地对眼球进行调整,眼球被逐渐向后调长,眼球被调长后,随之而来的是再视远物时,图像再次落在视网膜的前面,再次不清晰,需要再次配镜,如此往复,不仅加速了眼镜度数的提高、眼睛视力的下降,同时还会使戴镜者增加患上视网膜脱落、青光眼和视网膜病等眼疾的危险。
3.因此,急需一种新的改进来解决上述技术问题。
技术实现要素:
4.本实用新型的目的在于克服上述现有技术的问题,提供了一种自适应智能眼镜,可根据患者自身的视力来进行眼镜佩戴时瞳距及眼睛度数的智能调节,通过激光测距模块自动识别患者看近或看远,并相应的调整镜片度数寻早最佳视力范围的,实现对眼睛晶状体的锻炼,长期佩戴可有效降低患者的近视度数。
5.上述目的是通过以下技术方案来实现:
6.一种自适应智能眼镜,包括镜架和镜片,所述镜架包括c形镜框和与所述镜框两端分别连接的镜腿;所述镜框内设置有主板控制模块、供电模块、瞳距调整模块、对应于左右眼睛的度数调整模块、激光测距模块和通信模块;
7.所述供电模块、所述通信模块、所述激光测距模块和所述度数调整模块分别与所述主板控制模块连接,所述度数调整模块还与所述瞳距调整模块连接,所述镜片包括相互贴合的主镜片和副镜片,所述主镜片与所述副镜片分别与所述度数调整模块连接,并可在所述度数调整模块的驱动下做相对移动变换成不同的度数。
8.进一步的,所述镜框包括可相互扣合形成镜框密封腔体的上壳体与下壳体,所述下壳体上开设有一组相互对称的,可供所述镜片贯穿的镜片槽,所述镜片的顶部贯穿所述镜片槽后与安装于所述镜框密封腔体内的所述度数调整模块连接,所述度数调整模块可在所述镜框密封腔体内做水平向移动,并可通过所述瞳距调整模块对其移动后的位置进行定位。
9.进一步的,所述瞳距调整模块包括设置于所述镜框密封腔体顶部的t形支撑杆,所述支撑杆下方的两侧分别开设有两组相互对称的限位滑槽,所述限位滑槽可与设置于所述度数调整模块顶部的滑块匹配;
10.还包括开设于所述上壳体内侧的一组相互对称的锁紧孔,锁紧螺丝可贯穿所述锁
紧孔与所述度数调整模块抵触,达到位置锁紧的目的。
11.进一步的,所述激光测距模块为激光测距仪,安装于所述支撑杆的t形部,对应的,在所述上壳体上开设有可供激光贯穿的激光孔。
12.进一步的,所述度数调整模块包括设置于所述支撑杆下方的一组相互对称的固定架,所述固定架的顶部连接有所述滑块,所述固定架的底部与所述下壳体的内侧抵触,且所述固定架的两侧通过所述上壳体的内外侧壁夹持,并可沿所述侧壁移动;
13.所述固定架的两端开设有相互对称的第一双向丝杆通孔和第二双向丝杆通孔,所述双向丝杆的一端通过所述第一双向丝杆通孔套设,另一端与贯穿所述第二双向丝杆通孔的电机的转轴连接,所述电机固定于所述第二双向丝杆通孔的外侧;
14.所述双向丝杆上套设有与右旋螺纹匹配的第一丝杆滑块,和与左旋螺纹匹配的第二丝杆滑块;所述第一丝杆滑块与主镜片固定座连接,所述第二丝杆滑块与副镜片固定座连接;所述主镜片固定座与所述副镜片固定座相互贴合且位于所述镜片槽内。
15.进一步的,所述电机为微型减速电。
16.进一步的,所述右旋螺纹与所述左旋螺纹交点位于所述双向丝杆的中间位置。
17.进一步的,所述第一丝杆滑块与所述第二丝杆滑块的顶部均开设有条状凸起,沿所述条状凸起的两侧设置有一组相互对称的圆弧形滑块,所述固定架的底部开设有与所述圆弧形滑块匹配的条状滑槽,所述圆弧形滑块可沿所述条状滑槽水平移动。
18.进一步的,还包括终端控制模块,所述终端控制模块与所述通信模块远程连接,用于给所述主板控制模块发送控制指令及接受所述主板控制模块的信息回馈,所述终端控制模块包括手机app或pc系统界面管理。
19.进一步的,所述镜框上还可设置有与所述主板控制模块连接的充电接口,用于给所述供电模块充电;所述供电模块为可充电锂电池。
20.有益效果
21.本实用新型所提供的一种自适应智能眼镜,可根据患者自身的视力来进行眼镜佩戴时瞳距及眼睛度数的智能调节,通过激光测距模块自动识别患者看近或看远,并相应的调整镜片度数寻早最佳视力范围的,实现对眼睛晶状体的锻炼,长期佩戴可有效降低患者的近视度数。本眼镜不仅结构简单,操作方便,而且同时具备瞳距调节、验光、反转拍的功能,能使眼睛得到最佳的调节与保护。
附图说明
22.图1为本实用新型所述一种自适应智能眼镜的模块示意图;
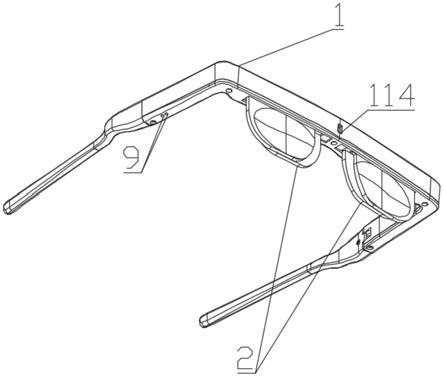
23.图2为本实用新型所述一种自适应智能眼镜的第一视角图;
24.图3为本实用新型所述一种自适应智能眼镜的第二视角图;
25.图4为本实用新型所述一种自适应智能眼镜的第三视角图;
26.图5为本实用新型所述一种自适应智能眼镜的镜架结构示意图;
27.图6为本实用新型所述一种自适应智能眼镜的镜架爆炸图;
28.图7为本实用新型所述一种自适应智能眼镜的内部结构示意图;
29.图8为本实用新型所述一种自适应智能眼镜的支撑杆第一视角示意图;
30.图9为本实用新型所述一种自适应智能眼镜的支撑杆第二视角示意图;
31.图10为本实用新型所述一种自适应智能眼镜的度数调整模块结构示意图;
32.图11为本实用新型所述一种自适应智能眼镜的固定架第一视角示意图;
33.图12为本实用新型所述一种自适应智能眼镜的固定架第二视角示意图。
34.附图标记
[0035]1‑
镜架、11
‑
镜框、111
‑
上壳体、112
‑
下壳体、113
‑
镜框密封腔体、114
‑
激光孔、115
‑ꢀ
镜片槽、12
‑
镜腿、2
‑
镜片、21
‑
主镜片、22
‑
副镜片、3
‑
主板控制模块、4
‑
瞳距调整模块、 41
‑
支撑杆、42
‑
限位滑槽、43
‑
锁紧孔、44
‑
锁紧螺丝、5
‑
度数调整模块、51
‑
固定架、52
‑
滑块、53
‑
第一双向丝杆通孔、54
‑
第二双向丝杆通孔、55
‑
条状滑槽、56
‑
电机、57
‑
双向丝杆、 571
‑
右旋螺纹、572
‑
左旋螺纹、58第一丝杆滑块、59
‑
第二丝杆滑块、510
‑
主镜片固定座、 511
‑
副镜片固定座、512
‑
条状凸起、513
‑
圆弧形滑块、6
‑
激光测距模块、7
‑
供电模块、8
‑
通信模块、9
‑
充电接口。
具体实施方式
[0036]
下面根据附图和实施例对本实用新型作进一步详细说明。
[0037]
如图1
‑
4所示,一种自适应智能眼镜,包括镜架1和镜片2,所述镜架1包括c形镜框11和与所述镜框11两端分别连接的镜腿12;所述镜框11内设置有主板控制模块3、供电模块7、瞳距调整模块4、对应于左右眼睛的度数调整模块5、激光测距模块6和通信模块8;
[0038]
其中,所述供电模块7、所述通信模块8、所述激光测距模块6和所述度数调整模块5 分别与所述主板控制模块3连接,所述度数调整模块5还与所述瞳距调整模块4连接,所述镜片2包括相互贴合的主镜片21和副镜片22,所述主镜片21与所述副镜片22分别与所述度数调整模块5连接,并可在所述度数调整模块5的驱动下做相对移动,变换成不同的度数,以适应佩戴者的最佳视力值。
[0039]
实施例1
[0040]
如图5和6所示,作为镜框11的优化,所述镜框11包括可相互扣合形成镜框密封腔体 113的上壳体111与下壳体112,其中镜框密封腔体113主要位于上壳体111内,所述下壳体112上开设有一组相互对称的,可供所述镜片2贯穿的镜片槽115,所述镜片2的顶部贯穿所述镜片槽115后与安装于所述镜框密封腔体113内的所述度数调整模块5连接,所述度数调整模块5可在所述镜框密封腔体113内做水平向移动,并可通过所述瞳距调整模块4对其移动后的位置进行定位,主要目的在于调整适合佩戴者眼镜瞳距的最佳镜片位置,以便更精准的进行后续镜片度数的调整。本实施例所描述的技术方案兼具配眼镜时验光仪的功能。
[0041]
实施例2
[0042]
如图6
‑
9所示,所述瞳距调整模块4包括设置于所述镜框密封腔体113顶部的t形支撑杆41,所述支撑杆41下方的两侧分别开设有两组相互对称的限位滑槽42,所述限位滑槽42 可与设置于所述度数调整模块5顶部的滑块52匹配;其中支撑杆41的t形部可对度数调整模块5的移动进行限位。
[0043]
还包括开设于所述上壳体111内侧的一组相互对称的锁紧孔43,锁紧螺丝44可贯穿所述锁紧孔43与所述度数调整模块5抵触,达到位置锁紧的目的。
[0044]
预先测定佩戴者眼睛的瞳距,然后分别移动所述度数调整模块5与对应的瞳距位
置,最后通过旋紧锁紧螺丝达到锁紧所述度数调整模块5在所述镜框密封腔体113位置的目的;如需进行再次调整,仅需反向旋转锁紧螺丝至与所述度数调整模块5脱离即可。
[0045]
作为本实施例的进一步优化,所述度数调整模块5在所述镜框密封腔体113内位置的移动还可通过电机驱动,实现智能控制的目的,且控制的精度会更加精准。
[0046]
实施例3
[0047]
如图5和9所示,所述激光测距模块6为激光测距仪,安装于所述支撑杆41的t形部,对应的,在所述上壳体111上开设有可供激光贯穿的激光孔114。
[0048]
当佩戴者看近物与看远物时,如果镜片的度数始终保持不变的话,不仅会影响观看的效果,而且频繁的切换还会对佩戴者的眼睛造成进一步的危害,进而会增加眼睛的度数。为了避免此种情况的发生,本技术方案通过激光测距仪来感应佩戴者所观察的物体所处的大概距离,根据预设的最佳调节值来随时控制镜片度数的增加或减少,带来更好的观察体验。
[0049]
实施例4
[0050]
如图10
‑
12所示,所述度数调整模块5包括设置于所述支撑杆41下方的一组相互对称的固定架51,所述固定架51的顶部连接有所述滑块52(每个所述固定架51顶部的滑块52 数量不小于1个,本实施例中每个所述固定架51顶部设置有2个滑块52),所述固定架51 的底部与所述下壳体112的内侧抵触,且所述固定架51的两侧通过所述上壳体111的内外侧壁夹持,并可沿所述侧壁移动,固定架51的移动可选择手动或电动控制,移动的目的在于寻找与佩戴者对应的瞳距;
[0051]
所述固定架51的两端开设有相互对称的第一双向丝杆通孔53和第二双向丝杆通孔54,所述双向丝杆57的一端通过所述第一双向丝杆通孔53套设,另一端与贯穿所述第二双向丝杆通孔54的电机56的转轴连接,所述电机56固定于所述第二双向丝杆通孔54的外侧;
[0052]
所述双向丝杆57上套设有与右旋螺纹571匹配的第一丝杆滑块58,和与左旋螺纹572 匹配的第二丝杆滑块59;所述第一丝杆滑块58与主镜片固定座510连接,所述第二丝杆滑块59与副镜片固定座511连接;所述主镜片固定座510与所述副镜片固定座511相互贴合且位于所述镜片槽115内。
[0053]
本实施例中所述电机56为微型减速电,受主板控制模块3控制。
[0054]
所述右旋螺纹571与所述左旋螺纹572交点位于所述双向丝杆57的中间位置。
[0055]
实施例5
[0056]
如图10所示,作为度数调整模块5的进一步优化,所述第一丝杆滑块58与所述第二丝杆滑块59的顶部均开设有条状凸起512,沿所述条状凸起512的两侧设置有一组相互对称的圆弧形滑块513,所述固定架51的底部开设有与所述圆弧形滑块513匹配的条状滑槽55,所述圆弧形滑块513可沿所述条状滑槽55水平移动。本结构可促进第一丝杆滑块58与所述第二丝杆滑块59的滑行稳定,进而可更精准的实现主镜片21与副镜片22的度数调整。本实施例所描述的技术方案兼具眼睛训练时反转拍的功能。
[0057]
实施例6
[0058]
作为对本自适应智能眼镜的智能化控制,还包括终端控制模块(图中未标注),所述终端控制模块与所述通信模块8远程连接,用于给所述主板控制模块3发送控制指令及接
受所述主板控制模块3的信息回馈,所述终端控制模块包括手机app或pc系统界面管理。
[0059]
实施例7
[0060]
如图4所示,本自适应智能眼镜采用电控形式,所述镜框11上还可设置有与所述主板控制模块3连接的充电接口9,用于给所述供电模块7充电;所述供电模块7为可充电锂电池。
[0061]
以上所述仅为说明本实用新型的实施方式,并不用于限制本实用新型,对于本领域的技术人员来说,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。