1.本技术涉及破碎机的技术领域,尤其是涉及一种气流破碎机的自动进料装置。
背景技术:
2.气流粉碎机的粉碎机理决定了其适用范围广、成品细度高等特点,典型的物料有:超硬的金刚石、碳化硅、金属粉末等,高纯要求的:陶瓷色料、医药、生化等,低温要求的:医药、pvc。通过将气源部份的普通空气变更为氮气、二氧化碳气等惰性气体,可使本机成为惰性气体保护设备,适用于易燃易爆、易氧化等物料的粉碎分级加工。
3.目前气流粉碎机在工作时,为了使提高物料在气流粉碎机内的破碎效率,故需要先将物料添加到预研磨装置中进行预加工后再导送至气流粉碎机的粉碎腔,然后再将经过滤干燥后的压缩空气通过拉瓦尔喷嘴高速喷射入粉碎腔,在多股高压空气的交汇点处物料被反复碰撞、磨擦、剪切而粉碎,粉碎后的物料在风机抽力作用下随上升气流运动至分级区,在高速旋转的分级涡轮产生的强大离心力作用下,使粗细物料得到分离。
4.针对上述中的相关技术,发明人认为现有的物料在进入到预研磨装置的研磨腔之前,需要工人先将物料逐包的加入至筛网中进行过滤。由于工人用人手添加物料时,难以对物料的添加量进行控制,容易导致工人过量的将物料添加到研磨腔内,存在有影响预研磨装置的研磨效率的缺陷。
技术实现要素:
5.为了能够使物料的添加量得到控制,提高预研磨装置的研磨效率,本技术提供一种气流破碎机的自动进料装置。
6.本技术提供的一种气流破碎机的自动进料装置采用如下的技术方案:
7.一种气流破碎机的自动进料装置,包括设置于预研磨装置一侧的固定架,滑动设置于固定架上的滑块,设置于滑块且用于上料的上料机构,设置于固定架上且用于驱动滑块滑移的驱动组件,以及设置于固定架一侧的储料筒。
8.通过采用上述技术方案,通过设置上料机构,工人可以在需要上料时使用,以能够灵活的控制添加到研磨腔内的物料量,在一定程度上提升了预研磨装置的研磨效率,而通过设置驱动组件,工人可以在上料机构承载物料后使用,能够便于工人对上料机构内的物料进行转移,有效的减少了人力成本的使用,提高了工人的工作效率。
9.可选的,所述上料机构包括设置于滑块一侧的伸缩部,以及设置于伸缩部远离滑块的一端且用于承载物料的承载组件。
10.通过采用上述技术方案,通过设置承载组件,可以在上料时使用,能够便于工人对物料的上料量进行有效的控制,而通过设置伸缩部,可以便于工人灵活的对承载组件所在的高度进行调整。
11.可选的,所述伸缩部包括设置于滑块底部的套筒,滑插设置于套筒远离滑块一端的连接杆,以及设置于套筒的侧壁且活塞杆的端部与连接杆侧壁相连接的气缸。
12.通过采用上述技术方案,通过设置套筒、连接杆与气缸,工人可以在需要对承载组件所在的高度进行控制时,启动气缸,通过调节气缸活塞杆的伸缩度来带动连接杆进行升降,从而再带动承载组件整体进行升降。
13.可选的,所述承载组件包括设置于连接杆端部的安装块,转动设置于安装块远离连接杆一侧的转轴,设置于转轴一侧的承料斗,以及设置于安装块且用于调节承料斗位置的转动件。
14.通过采用上述技术方案,通过设置转轴、承料斗与转动件,工人可以在需要对储料筒内物料进行转移时,通过使用转动件来带动转轴与承料斗整体进行翻转,以通过承料斗来挖起储料筒内物料,然后再通过伸缩部的提升以及驱动组件的带动,以使承料斗移动至筛网上方,最后再使用转动件来带动承料斗翻转,从而达到将承料斗内物料倒至筛网的目的,进而能够在一定程度上便于工人对物料的上料量进行控制。
15.可选的,所述转动件包括设置于安装块一侧的伺服电机,设置于转轴端部的从动齿轮,以及设置于伺服电机的输出轴且与从动齿轮相啮合的主动齿轮。
16.通过采用上述技术方案,通过设置伺服电机、主动齿轮与从动齿轮,工人可以在需要对承料斗的角度进行调整时,启动伺服电机,使主动齿轮在伺服电机输出轴的带动下进行旋转,以使从动齿轮能够跟随主动齿轮进行转动,从而带动转轴与承料斗整体进行翻转。
17.可选的,所述驱动组件包括设置于固定架一侧的驱动电机,一端与驱动电机的输出轴相连接,另一端贯穿滑块且与滑块螺纹连接的丝杆。
18.通过采用上述技术方案,通过设置驱动电机与丝杆,工人可以在需要对滑块的位置进行调节时,启动驱动电机,使丝杆在驱动电机输出轴的带动下进行旋转,以使滑块在丝杆的带动下沿固定架进行移动,从而便于对物料的转移。
19.可选的,所述连接杆的侧壁开设有导向槽;所述套筒的内腔设置有与导向槽滑移配合的导向块。
20.通过采用上述技术方案,通过设置导向槽与导向块,可以在使用气缸来驱动连接杆进行升降时,能够使导向块沿着导向槽的延伸方向进行滑移,从而能够在一定程度上提高连接杆的升降稳定性。
21.可选的,所述承料斗的内底壁设置有压力传感器;所述固定架上设置有与压力传感器电性连接且用于控制驱动电机、伺服电机以及气缸的控制器。
22.通过采用上述技术方案,通过设置压力传感器与控制器,可以通过压力传感器来感受到承料斗内的物料量,并通过将电性号传输至控制器,然后再通过控制器来实现对驱动电机、伺服电机以及气缸的开闭,从而能够在一定程度上提高了整套装置的自动化程度,有效的减少人力成本的使用。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.通过设置上料机构,可灵活的控制添加到研磨腔内的物料量,提升了预研磨装置的研磨效率,而设置的驱动组件,能够便于工人对上料机构内的物料进行转移,有效减少了人力成本的使用,提高了工人的工作效率;
25.2.通过设置转轴、承料斗与转动件,可以达到将承料斗内物料倒至筛网的目的,进而能够便于工人对物料的上料量进行有效的控制,另外,设置的导向槽与导向块,可以使导向块沿着导向槽的延伸方向进行滑移,从而能够在一定程度上提高连接杆的升降稳定性。
附图说明
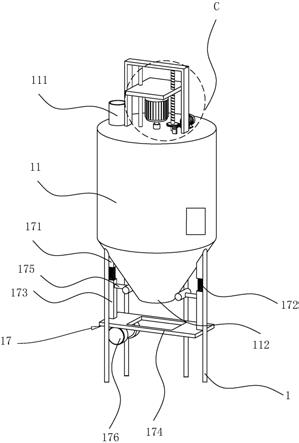
26.图1是本技术实施例的自动进料装置的整体结构示意图;
27.图2是本技术实施例的自动进料装置的部分结构示意图;
28.图3是图1中a部分的放大图;
29.图4是本技术实施例的自动进料装置的上料机构的剖视图;
30.图5是图2中b部分的放大图。
31.附图标记说明:1、预研磨装置;10、固定架;100、支撑框;101、定位杆;11、滑块;12、储料筒;2、伸缩部;20、套筒;200、导向块;21、连接杆;210、导向槽;211、凸块;22、气缸;3、安装块;30、转轴;31、承料斗;310、压力传感器;4、伺服电机;40、从动齿轮;41、主动齿轮;5、驱动电机;50、丝杆;6、控制器;7、气流破碎机;8、筛网;80、连接管。
具体实施方式
32.以下结合附图1
‑
5对本技术作进一步详细说明。
33.本技术实施例公开一种气流破碎机的自动进料装置。参照图1,气流破碎机7的自动进料装置包括固定架10与储料筒12。其中,在气流破碎机7的一侧设置有预研磨装置1,同时,在预研磨装置1远离气流破碎机7的一侧设置有筛网8,筛网8通过连接管80与预研磨装置1的研磨腔相连通。储料筒12设置在地面上且位于预研磨装置1靠近筛网8的一侧,另外,固定架10整体设置在储料筒12的一侧。
34.参照图1和图3,固定架10整体包括两个支撑框100与一根定位杆101,其中,在定位杆101一侧滑移连接有滑块11,同时,为了在一定程度上便于工人对物料添加量的控制,故在滑块11的一侧设置有上料机构,且在本实施例中,上料机构包括伸缩部2与承载组件。其中,伸缩部2整体设置在滑块11的一侧且向下延伸,承载组件整体设置在伸缩部2远离滑块11的一端。
35.另外,参照图3,在本实施例中,伸缩部2包括套筒20、连接杆21与气缸22。其中,套筒20的一端安装在滑块11的侧壁,另一端与连接杆21滑插配合,同时,气缸22安装在套筒20的侧壁,且在连接杆21侧壁远离滑块11的一端固定有凸块211,气缸22活塞杆的端部与凸块211的顶部相连接。
36.此外,参照图2和图3,为了能够有效的提高连接杆21的滑移稳定性,故在套筒20内侧壁对称固定有两个导向块200,同时,在连接杆21的两侧对称开设有两条导向槽210,其中,导向块200与导向槽210滑移连接。工作时,气缸22启动后会带动凸块211进行升降,从而通过凸块211来带动连接杆21进行升降。
37.参照图4和图5,在本实施例中,承载组件包括安装块3、转轴30与承料斗31。安装块3固定在连接杆21远离滑块11的一端,转轴30转动连接在安装块3远离连接杆21的一侧,承料斗31安装在转轴30远离安装块3的一侧,同时,转动件设置在安装块3的一端。
38.其中,在本实施例中,转动件包括伺服电机4、主动齿轮41与从动齿轮40。从动齿轮40套设在转轴30的一端,伺服电机4固定在安装块3的底部,另外,主动齿轮41安装在伺服电机4的输出轴且与从动齿轮40相啮合。工作时,伺服电机4启动后会通过输出轴来驱动主动齿轮41转动,以使从动齿轮40跟随主动齿轮41进行旋转,从而进一步带动转轴30与承料斗31整体进行翻转,以达到承料的目的。
39.参照图1和图2,为了能够驱动滑块11沿定位杆101的长度方向进行滑移,故在定位杆101的一侧设置有驱动组件,且在本实施例中,驱动组件包括驱动电机5与丝杆50。其中,驱动电机5固定在定位杆101的侧壁且位于远离气流破碎机7的一端,丝杆50的一端与驱动电机5的输出轴相装配,另一端与支撑框100的侧壁转动连接。同时,滑块11被丝杆50所贯穿,且与丝杆50螺纹连接。
40.工作时,在驱动电机5启动后,使丝杠在驱动电机5输出轴的驱动下进行旋转,从而使滑块11在丝杆50的带动下沿定位杆101的延伸方向进行滑移,进而再带动承料斗31来进行上料操作。
41.参照图3和图4,在承料斗31内侧的底部设置有压力传感器310,同时,在其中一个支撑框100的侧壁安装有控制器6,其中,控制器6的输入端与压力传感器310电性连接,输出端分别与驱动电机5、伺服电机4以及气缸22电性连接。
42.本技术实施例一种气流破碎机7的自动进料装置的实施原理为:工作时,工人首先为自动进料装置通电,此时的压力传感器310感受到承料斗31内的压力,会将电信号传输至控制器6,控制器6再将电信号传输至气缸22,使承料斗31下降到预定位置后,控制器6再将电信号传输至伺服电机4,使伺服电机4带动承料斗31翻转并将储料筒12内的物料挖入承料斗31中。
43.然后,压力传感器310感受到压力值的变化后再将电信号传输至控制器6,控制器6再将电信号传输至气缸22,使气缸22带动承料斗31上升至指定高度后,控制器6再将电信号传输至驱动电机5,使承料斗31在驱动电机5的带动下移动至筛网8的上方指定的位置后,再通过控制器6将电信号传输至伺服电机4,使伺服电机4带动承料斗31翻转,从而使物料倒至筛网8上,进而达到便于工人对物料的添加量进行控制的目的。
44.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。