1.本发明涉及抽水蓄能机组的控制领域,特别涉及一种安全可靠的抽水蓄能机组机械制动系统的控制方法。
背景技术:
2.机械制动系统是抽水蓄能机组发电电动机的重要辅助设备,在机组启动、停机、工况转换过程及机组蠕动监测控制中起到机组制动作用,减少机组的惰性运行时间,以达到保护机组推力轴承瓦和缩短停机时间目的。有些机组机械制动设计还兼有顶转子功能,在机组检修需要顶转子时使用。
3.机械制动的控制方法在现有技术中过于简单,无法做出一些保护,如机械制动高速投入、带机械制动升速等恶性故障偶有发生,可能造成发电电动机粉尘污染、机组轴系偏移、机械结构受损、制动器损坏、制动环损坏等严重后果,影响机组的安全稳定运行。基于上述问题,设计一种安全、可靠的抽水蓄能机组机械制动典型控制程序、流程和回路。
技术实现要素:
4.本发明的目的在于克服现有技术的不足,提供一种安全可靠的抽水蓄能机组机械制动系统的控制方法,对机械制动的投入进行控制,提高稳定和可靠。
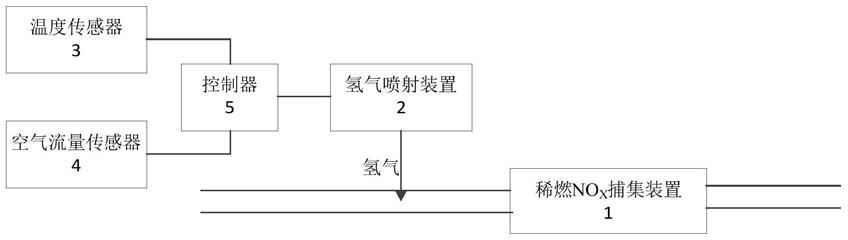
5.为了实现上述目的,本发明采用的技术方案为:一种安全可靠的抽水蓄能机组机械制动系统的控制方法,包括在机组停机过程中,监控系统实时监控gcb分闸信号、导叶关闭信号、测速装置的故障信号、机组转速信号,当gcb分闸、导叶全部关闭、测速装置无故障且机组转速信号满足制动投入要求时,自动执行投入机械制动用于控制机组的制动。
6.机组停机过程包括正常停机和事故停机,当处于正常停机时,机组转速信号满足制动要求为机组转速小于额定转速的第一百分比常数;当事故停机时,机组转速信号满足制动要求时的机组转速为机组转速下降到额定转速的第二百分比常数,第二百分比常数大于第一百分比常数。
7.监控系统实时监控制动器的位置开关来检测机械制动的制动器的投入和退出状态,每个制动器至少配置一个双接点位置开关,所有制动器的双接点位置开关的退出接点串联后送入到监控系统中来判断机械制动的退出,各制动器投入接点并联后送入到监控系统中用于判断机械制动的投入;监控系统实时显示机械制动的投/退位置信息。
8.机组转速信号的采集采用双信号源进行测速的测速装置,测试装置包括齿盘测速系统和pt残压测速系统进行机组转速的测量,监控系统根据双信号源的测速信号来控制机械制动的投退控制。
9.测试装置设置有自诊断功能模块,在输入信号异常及装置异常时发出故障信号并闭锁转速信号输出,所述测速装置实时采集转速信号。
10.位置开关采用机械形成压紧位置信号器来采集制动器的位置信号,监控系统实时监控每一个制动器的位置状态和机械制动系统的投退状态,当通过位置开关监测到任一制
动器投入,则判断为机械制动投入;当所有制动器均退出,则判断机械制动退出。
11.监控系统设置安全闭锁流程,监控系统对检测到的状态信号:机械制动系统是否可用、测速装置是否正常、机组转速、机组出口断路器位置、导叶位置、主进水阀位置等信号进行异常判断,当任一信号出现异常时,控制闭锁机械制动投入,禁止机械制动的投入。
12.监控系统检测机组转速高于设定阈值时,当检测到机械制动投入或机械制动未退出状态信号时,立刻发出退机械制动指令并保持;经延时后若机械制动投入或机械制动未退出状态信号仍然存在时,则控制机组停机。
13.监控系统实时监控粉尘收集装置启动信号、机械制动系统供气压力低信号、机械制动投/退位置不一致状态信号、机械制动系统压力低信号、机组转速异常闭锁机械制动投入状态信号、机械制动系统故障信号,以实现粉尘收集装置启动监控报警、机械制动系统供气压力低报警、机械制动投/退位置不一致报警、机械制动系统压力低报警、机组转速异常闭锁机械制动投入报警、机械制动系统故障报警。
14.监控系统实时监控机械制动动力介质管路上的介质控制电磁阀的状态,用于表征机械制动的状态;所述电磁阀采用具备过电压抑制功能的单线圈单稳态电磁阀。
15.本发明的优点在于提供一种可以提高机组机械制动系统安全性、可靠性的方法,由于采用本方法,当gcb分闸、导叶全部关闭、测速装置无故障且机组转速信号满足制动投入要求时,自动执行投入机械制动用于控制机组的制动,保证了制动投入的安全可靠,避免在转速、故障等情况下的误投入造成的制动安全风险;通过对制动系统进行各种改进,提高了系统的稳定可靠性,提高了安全。
附图说明
16.下面对本发明说明书各幅附图表达的内容及图中的标记作简要说明:
17.图1为本发明控制方法流程图;
18.图2为机械制动典型控制回路接线原理图。
具体实施方式
19.下面对照附图,通过对最优实施例的描述,对本发明的具体实施方式作进一步详细的说明。
20.本发明针对抽水蓄能机组机械制动系统进行安全可靠的控制,提供一种提高抽水蓄能机组机械制动系统安全和可靠性的控制系统及方法。抽水蓄能机组机械制动采用风闸顶起制动的方式,机械制动系统由装设于下机架的闸板和装设于转子上的制动环组成,利用风闸与制动环之间的摩擦力而达到制动效果,风闸的操作能源采用0.7
‑
0.8mpa的压缩空气。
21.如图1所示,一种安全可靠的抽水蓄能机组机械制动系统的控制方法,包括在机组停机过程中,监控系统实时监控gcb分闸信号、导叶关闭信号、测速装置的故障信号、机组转速信号,当gcb分闸、导叶全部关闭、测速装置无故障且机组转速信号满足制动投入要求时,自动执行投入机械制动用于控制机组的制动。机组停机过程包括正常停机和事故停机,当处于正常停机时,机组转速信号满足制动要求为机组转速小于额定转速的5%
‑
10%;当事故停机时,机组转速信号满足制动要求时的机组转速为机组转速下降到额定转速的20%
‑
30%.这样主要考虑到正常停机情况下只要保证可靠停机即可,而故障停机则需要尽快停机保证机组的安全。抽水蓄能机组正常停机一般在转速下降至50%额定转速时投入电气制动,转速继续下降至(5%
‑
10%)额定转速时,再投入机械制动直至机组停止转动;机械制动装置单独用于紧急停机时,应能在机组转速下降至(20%
‑
30%)额定转速时投入直至停止转动。在满足机组停机时间要求的情况下,从保护机械制动设备(制动器、制动环)角度出发,机械制动转速宜取较小值。
22.监控系统实时监控制动器的位置开关来检测机械制动的制动器的投入和退出状态,每个制动器至少配置一个双接点位置开关,所有制动器的双接点位置开关的退出接点串联后送入到监控系统中来判断机械制动的退出,各制动器投入接点并联后送入到监控系统中用于判断机械制动的投入;监控系统实时显示机械制动的投/退位置信息。
23.机组转速信号的采集采用双信号源进行测速的测速装置,测试装置包括齿盘测速系统和pt残压测速系统进行机组转速的测量,监控系统根据双信号源的测速信号来控制机械制动的投退控制。
24.测试装置设置有自诊断功能模块,在输入信号异常及装置异常时发出故障信号并闭锁转速信号输出,所述测速装置实时采集转速信号。
25.位置开关采用机械形成压紧位置信号器来采集制动器的位置信号,监控系统实时监控每一个制动器的位置状态和机械制动系统的投退状态,当通过位置开关监测到任一制动器投入,则判断为机械制动投入;当所有制动器均退出,则判断机械制动退出。
26.监控系统设置安全闭锁流程,监控系统对检测到的状态信号:机械制动系统是否可用、测速装置是否正常、机组转速、机组出口断路器位置、导叶位置、主进水阀位置等信号进行异常判断,当任一信号出现异常时,控制闭锁机械制动投入,禁止机械制动的投入。
27.监控系统检测机组转速高于设定阈值时,当检测到机械制动投入或机械制动未退出状态信号时,立刻发出退机械制动指令并保持;经延时后若机械制动投入或机械制动未退出状态信号仍然存在时,则控制机组停机。
28.监控系统实时监控粉尘收集装置启动信号、机械制动系统供气压力低信号、机械制动投/退位置不一致状态信号、机械制动系统压力低信号、机组转速异常闭锁机械制动投入状态信号、机械制动系统故障信号,以实现粉尘收集装置启动监控报警、机械制动系统供气压力低报警、机械制动投/退位置不一致报警、机械制动系统压力低报警、机组转速异常闭锁机械制动投入报警、机械制动系统故障报警。
29.监控系统实时监控机械制动动力介质管路上的介质控制电磁阀的状态,用于表征机械制动的状态;所述电磁阀采用具备过电压抑制功能的单线圈单稳态电磁阀。
30.为了提高机械制动系统的安全可靠性,对机械制动系统的控制做如下说明:
31.1.一般原则
32.(1)机械制动系统应适应机组正、反双向旋转运行的要求,确保在各种工况下能安全停机,并满足机组工况转换的要求。
33.(2)集成设计。机组机械制动一般不单独设置机械制动控制系统,其控制程序在计算机监控系统里实现,可充分利用监控系统的硬件和软件资源优势,实现控制逻辑。
34.(3)控制回路应简单、安全、可靠,应有防误投机械制动的安全闭锁措施。
35.(4)控制程序应满足机组各种工况转换及机组蠕动时机械制动投退的需要,控制
逻辑应有完善的安全闭锁条件。
36.2.安全性原则
37.(1)防止机组高转速情况下投入机械制动。
38.(2)防止转速信号误动导致高速加闸。
39.(3)防止一个或多个闸板未退出时,机组带闸转动。
40.(4)防止发生由于机械制动控制设备电源故障,监控系统默认机械制动为退出状态,带闸开机。
41.(5)防止发生机组运行中未经转速闭锁一键加闸设计。
42.(6)防止plc系统一经送电即自动误投机械制动。
43.3.可靠性原则
44.(1)每个制动器至少配置一个双接点位置开关,指示制动器的投入和退出两个状态,所有制动器的退出接点串联(所有制动器退出)即判断机械制动退出,各制动器投入接点并联(任何一个制动器投入)判断机械制动投入。
45.(2)任何控制方式应采取高转速闭锁及其他防止高速加闸的措施,控制回路中宜采用机组出口开关分闸位置,应采用导叶全关(含非同步导叶)位置,应采用机组转速装置故障信号和转速等信号硬接点进行闭锁,避免仅采取软件逻辑的闭锁方式。
46.(3)机械制动系统应纳入监控系统统一控制,监控系统应实时显示机械制动制动闸板的投/退位置,现地控制盘柜宜实时显示机械制动装置各个制动闸板的投/退位置。
47.4.机械制动转速信号
48.转速信号是机械制动控制的重要参量,其可靠性直接关系机械制动的安全性。转速信号异常导致机组高速误投机械制动偶有发生,造成恶劣后果。因此应引起高度重视,对于机械制动用转速信号应注意以下几方面。
49.(1)机械制动转速信号不宜采用单一信号源,宜采用齿盘测速和pt残压测速冗余测速信号,防止单一信号丢失或错误,导致误投制动。
50.(2)机械制动转速信号取自转速测量装置时,转速测量装置信号输入应有齿盘和pt冗余输入源。转速测量装置应有自诊断功能,输入信号异常及装置异常时应发出故障信号并闭锁所有转速信号输出,防止输出错误的转速信号,导致误投机械制动。转速测量装置应实时连续采集和处理速度信号,不应设置采集触发条件。
51.(3)机组转速信号宜采用常开接点信号,避免转速信号回路故障时收到错误的转速信号,不宜采用模拟量转速信号,以免在传感器或测量异常时产生转速为零的错误信号。
52.5.制动器位置信号
53.制动器位置信号也是机械制动控制的重要参量,其直接反映制动器的位置状态,错误的制动器位置信号可能引起制动投
‑
退失败,甚至带制动启机等后果。对于制动器位置信号应注意以下几个问题。
54.(1)位置开关。位置开关宜选用纯机械行程压紧位置信号器,不宜采用微动开关,因为机组运行时的机械振动易导致微动开关故障发出错误的位置信号,且微动开关的机械强度较差易损坏。
55.(2)制动器位置信号回路应简单、可靠。不宜单独设置机械制动信号装置,制动器位置信号宜直接上送计算机监控系统,在计算机监控系统中进行有关逻辑组态和流程设
计。在计算机监控系统中应能监视每个制动器的位置状态和机械制动系统投
‑
退状态。
56.(3)机械制动投
‑
退状态信号。“机械制动投入”状态信号应取任一制动器投入信号,“机械制动退出”状态信号宜取所有制动器退出位置信号的“与”逻辑。“机械制动投入”和“机械制动退出”信号应为两个信号量,不应为相互取反。
57.6.典型控制程序设计
58.机械制动控制流程设计不宜单独设置,宜结合机组工况转换流程,特别是启停机流程设计,它是机组工况转换控制流程的一部分。机械制动控制程序设计应注意以下几方面。
59.(1)机械制动控制应考虑机组各种工况转换的需求,包括正常停机、电气事故停机、机械事故停机、水泵断电、抽水转发电、轴承瓦温异常、机组启动、机组蠕动、高速误投制动等情况下机械制动控制策略及安全闭锁。
60.(2)机械制动控制安全闭锁,一方面基于顺控流程,投机械制动时根据机组不同运行状态对应的顺控流程,选择与机组运行工况相匹配的条件进行安全闭锁,一般涉及的状态信号有机械制动系统是否可用、转速测量装置是否正常、机组转速、机组出口断路器位置、导叶位置、主进水阀位置等,有相关信号异常时流程应闭锁机械制动投入;另一方面机械制动投入令程序逻辑出口也应重复相应的闭锁条件。机械制动用转速信号宜取自不同的设备或系统,形成冗余的转速条件校验。
61.(3)对于设计上停机稳态时机械制动保持投入的机组,“机械制动系统投入”、“机械制动系统可用”信号应作为机组启动的预启动条件,条件不满足时闭锁启动机组。
62.(4)对于设计上停机稳态时机械制动退出的机组,“机械制动系统退出”、“机械制动系统可用”信号应作为机组启动的与启动条件,条件不满足时闭锁启动机组。
63.(5)机组启动过程中,流程执行到退机械制动的相关步序时,无论当前机械制动状态是投入还是退出,均应无条件发机械制动退出令(指令宽度应确保机械制动可靠退出);命令发出后,必须收到“机械制动退出”信号并经延时后,流程方可继续执行下一步。
64.(6)在程序中设计控制逻辑,当机组转速高于设定值时,出现机械制动投入或机械制动未退出状态信号,立即发出退机械制动指令并保持退出令,经短延时后若机械制动投入或机械制动未退出状态信号仍然存在,执行停机。
65.(7)机械制动流程涉及的输入信号。机械制动投/退位置信号,机组转速信号(蠕动、5%、10%、15%等),转速装置故障,机械制动系统供气压力低监视。
66.(8)机械制动流程涉及的输出信号。机械制动投入令,机械制动退出令,粉尘收集装置启动,机械制动系统供气压力低报警,机械制动投/退位置不一致报警,机械制动系统压力低报警,机组转速异常闭锁机械制动投入报警,机械制动系统故障报警。
67.(9)控制流程设计。
68.1)机组正常停机或事故停机过程中由监控顺控流程自动执行投入/退出机械制动。
69.2)正常停机过程中,转速下降至额定值的5%~10%时,再投入机械制动直到静止状态。
70.3)事故停机过程中,转速下降至额定值的10%~20%时,再投入机械制动直到静止状态。
71.4)机组停机过程中,投入机械制动前应先判断机组测速系统是否正常运行,避免因机组测速系统故障导致转速信号误动而高速加闸。典型的控制流程如1所示,
72.为实现机组机械制动投
‑
退的安全控制,硬布线回路应注意以下几个问题。
73.(1)控制回路应简单、可靠,宜仅设计自动控制回路,不宜设计手动控制回路。
74.(2)为防止控制回路故障时误投制动,机械制动动力介质(气或油)管路上的介质控制电磁阀(机械制动投退电磁阀)宜采用单线圈单稳态电磁阀并具有过电压抑制措施,电磁阀励磁时投入机械制动,电磁阀失磁时退出机械制动,此设计可在控制回路断线、电源丢失等情况下可靠退出机械制动。电磁阀的状态应上送计算机监控系统,用于监视。
75.(3)控制回路应包括如下接点:现地盘柜投入机械制动按钮、监控系统正常停机、转速<5%、监控系统事故停机投入机械制动令、转速<15%、gcb分闸位置、导叶全关位置、机械制动投入电磁阀(转速信号根据实际情况整定)。
76.(4)为防止计算机监控系统控制器机械制动投入令输出接点异常引起误投制动,必要时可在控制器中设计冗余的机械制动投入令,并配置在控制器不同的开关量输出模块上,当冗余的机械制动投入令均正常输出时,机械制动才可投入。当采用单个单稳态电磁阀时,冗余制动投入令采取串联连接;当采用两个单稳态电磁阀时,冗余制动投入令在控制回路中相互独立,各控制一个电磁阀。
77.(5)机械制动控制回路中应串接必要的防误投闭锁条件,至少包括机组转速信号正常、导叶全关、机组出口断路器断开、机组转速小于某一设定值等闭锁条件,保障机械制动在电气和水力均隔离的状态下才允许投入,提高控制回路的安全性。若现场具备条件“机组转速小于某一设定值”转速信号宜取自机组振动保护系统等可提供低频转速信号的设备或系统作为机械制动转速条件的安全冗余校验,防止高速投入机械制动。
78.(6)机械制动典型控制回路。
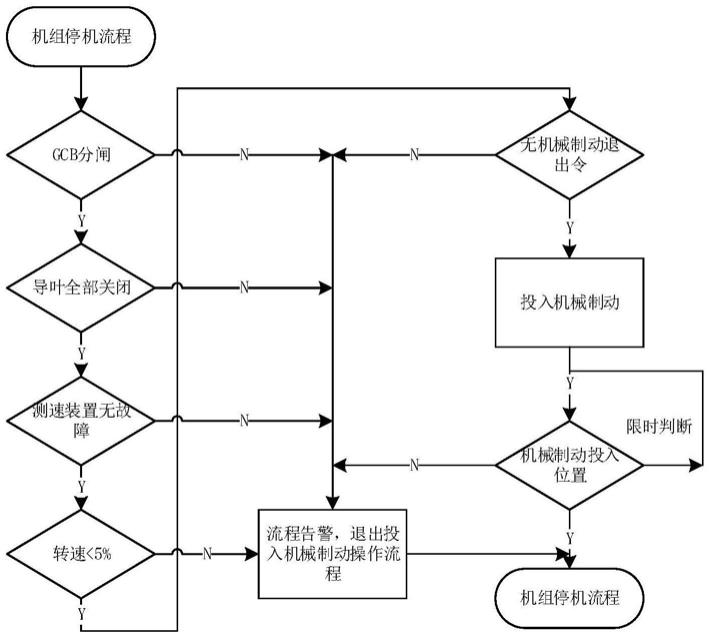
79.投入机械制动前应判断机组导水叶已全关、机组转速小于额定值15%~25%等闭锁条件是否满足,防止高速加闸。典型的控制接线图如图2,图中:
80.k1/k2为机组跳闸出口停机令
81.k3/k4为机组转速小于20%开关量信号
82.k5为监控系统机械刹车投退令
83.k6为机组转速小于5%开关量信号
84.sb为机旁盘手动投退刹按钮
85.k7为机组出口断路器分闸位置
86.k8为机组导叶已全关信号
87.k9测速装置正常
88.其原理为:当机组事故跳闸情况下,机组转速<20%,机组出口开关已分闸,机组导叶已全关,测速装置正常,则投入机械制动。
89.当机组无事故跳闸情况下,机组转速<5%,监控系统下发机械刹车投入令或手动按下机旁盘手动投入刹车按钮,机组出口开关已分闸,机组导叶已全关,测速装置正常,则投入机械制动。
90.显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性的改进,均在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。