使用音频数据检测即将发生的马达故障
1.相关申请的交叉引用
2.本技术基于2019年3月19日提交的第16/358,555号美国申请,该美国申请的内容通过引用全文合并于此。
技术领域
3.本公开总体上涉及电动马达,具体地但不排他地,涉及电动马达在无人运载工具中的使用。
背景技术:
4.无人运载工具,其也可以被称为自主运载工具,是能够在没有实际存在的人类操作者的情况下行驶的运载工具。无人运载工具可以以遥控模式、以自主模式或以部分自主模式操作。
5.当无人运载工具以遥控模式操作时,位于远程位置的飞行员或驾驶员能通过经由无线链路发送到无人运载工具的命令来控制无人运载工具。当无人运载工具以自主模式操作时,无人运载工具通常基于预编程的导航航路点、动态自动化系统或这些的组合来移动。此外,一些无人运载工具能以遥控模式和自主模式两者来操作,并且在一些情况下可以同时这么做。例如,远程飞行员或驾驶员可能希望在手动执行另一任务(作为示例,诸如操作用于拾取对象的机械系统)的同时将导航交给自主系统。
6.存在用于各种不同环境的各种类型的无人运载工具。例如,存在用于在空中、在地面上、在水下和在太空中操作的无人运载工具。无人运载工具的推进可以使用例如电动马达来发生。电动马达也可以与无人运载工具的有效载荷(payload)处置有关地被使用。提高无人运载工具推进和/或有效载荷处置的可靠性的设计将扩大其任务能力。
附图说明
7.本发明的非限制性且非穷举性的实施方式参照以下附图被描述,其中,贯穿各个视图,相同的附图标记指代相同的部分,除非另外指明。并非元件的所有实例都有必要被标记,以在适当的地方不使附图混乱。未必按比例绘制附图,而是将重点放在示出所描述的原理上。
8.图1a是根据本公开的一实施方式的无人飞行器(uav)的透视俯视图图示。
9.图1b是根据本公开的一实施方式的uav的底侧平面图图示。
10.图2是根据本公开的一实施方式的uav的结构机架的透视图图示。
11.图3a是根据本公开的一实施方式的uav的马达的透视图图示。
12.图3b是根据本公开的一实施方式的马达的局部分解透视图图示。
13.图4示出了根据本公开的一实施方式的用于uav的示例储存设施。
14.图5示出了根据本公开的一实施方式的关于自动马达故障检测和分析来实现的设备的框图。
15.图6示出了根据本公开的一实施方式的示例过程,该示例过程由计算设备实现以执行即将发生的马达故障检测以及与uav中包括的一个或更多个马达的检测到的状态有关的相关活动。
16.图7描绘了示出根据本公开的一实施方式的在频域中的音频数据的示例曲线的曲线图。
17.图8描绘了根据本公开的一实施方式的作为故障之前剩余的操作周期或故障之前剩余的操作时间的函数的最大与最小幅度比的曲线。
18.图9描绘了根据本公开的一实施方式的可在uav、计算设备、音频捕获设备或储存设施中实现的示例设备。
具体实施方式
19.这里描述了用于自动检测包括在无人飞行器中的电动马达的操作状态的系统、装置和方法的实施方式。在以下描述中,阐述了许多具体细节以提供对实施方式的透彻理解。然而,相关领域的技术人员将认识到,这里描述的技术可以在没有具体细节中的一个或更多个的情况下被实践,或者可以利用其他方法、部件、材料等被实践。在其他情况下,众所周知的结构、材料或操作未被详细示出或描述,以避免混淆某些方面。
20.贯穿说明书对“一个实施方式”或“一实施方式”的引用意思是关于该实施方式描述的特定特征、结构或特性被包括在本发明的至少一个实施方式中。因此,短语“在一个实施方式中”或“在一实施方式中”贯穿说明书在各处的出现未必都是指同一实施方式。此外,在一个或更多个实施方式中,特定特征、结构或特性可以以任何合适的方式组合。
21.这里描述的实施方式包括无人飞行器(uav),其是指能够在没有实际存在的人类飞行员的情况下执行一些功能的任何自主或半自主运载工具。uav可以采用各种各样的形式。例如,uav可以采用以下形式:固定机翼飞机、滑翔机、尾坐式飞机、喷气式飞机、涵道风扇飞机、比空气轻的飞艇(诸如软式飞艇(blimp)或可操纵的气球)、旋翼机(诸如直升机或多旋翼飞行器)和/或扑翼机等等。此外,术语“无人机”、“无人飞行器系统”(uavs)或“无人空中系统”(uas)也可以用于指代uav。
22.图1a和图1b示出了根据本公开的一实施方式的uav 100。uav 100的所示实施方式是垂直起降(vtol)无人飞行器(uav),其包括分别用于提供水平推进和垂直推进的分离的推进单元106和112。uav 100是固定机翼飞行器,顾名思义,其具有机翼组件102,该机翼组件102可以基于机翼形状产生升力,并且当通过推进单元106被水平推进时产生运载工具的向前空速。图1a是uav 100的透视俯视图图示,而图1b是uav 100的底侧平面图图示。
23.uav 100的所示实施方式包括机身104。在一个实施方式中,机身104是模块化的,并包括电池模块、航空电子设备模块和任务有效载荷模块。这些模块是彼此可分离的并且是可彼此机械固定的,以连续形成机身或uav主体的至少一部分。
24.电池模块包括用于容纳一个或更多个电池的腔,所述一个或更多个电池用于为uav 100供电。航空电子设备模块容纳uav 100的飞行控制电路,该飞行控制电路可以包括处理器和存储器、通信电子设备和天线(例如,蜂窝收发器、wi
‑
fi收发器等)以及各种传感器(例如,全球定位传感器、惯性测量单元(imu)、磁罗盘等)。任务有效载荷模块容纳与uav 100的任务相关的设备。例如,任务有效载荷模块可以包括有效载荷致动器,该有效载荷致
动器用于保持和释放附接在外部的有效载荷。在另一实施方式中,任务有效载荷模块可以包括用于携带相机/传感器设备(例如,相机、透镜、雷达、lidar、污染监测传感器、天气监测传感器等)的相机/传感器设备支架。
25.uav 100的所示实施方式还包括位于机翼组件102上的水平推进单元106,该水平推进单元106可以每个包括用于推进uav 100的马达、轴、马达座架和推进器。uav 100的所示实施方式包括固定到机翼组件102的两个吊杆组件110。在一个实施方式中,机翼组件102包括设置在机翼组件102的机翼翼片内的机翼翼梁203(见图2)。机翼翼梁203可以是沿着机翼翼片的内部长度延伸的中空结构构件(例如,管状杆),并提供主要结构构件,该主要结构构件将机翼组件102连接到机身104并且吊杆组件110安装到该主要结构构件。
26.吊杆组件110的所示实施方式每个包括其中设置吊杆214(见图2)的吊杆壳体111、垂直推进单元112、印刷电路板113和稳定器108。在所示实施方式中,吊杆214也是中空结构构件(例如,管状杆),该中空结构构件提供机翼翼梁103和垂直推进单元112安装到其的主要结构支撑。吊杆214也被称为“吊杆承载件”,因为它们承载吊杆组件110上的负载力。垂直推进单元112可以每个包括马达、轴、马达座架和推进器,以用于提供垂直推进。垂直推进单元112可以在uav 100正在下降(例如,到达递送位置)或上升(例如,在递送之后)的悬停模式期间被使用。uav 100可以包括稳定器108(或安定翼),以在飞行期间稳定uav的偏航(左转或右转)。在一些实施方式中,uav 100可以被配置为用作滑翔机。为此,uav 100可以关闭其推进单元的电源并滑行一段时间。
27.在飞行期间,uav 100可以通过控制其俯仰、滚转、偏航和/或海拔高度来控制其运动的方向和/或速度。例如,稳定器108可以包括用于控制uav的偏航的一个或更多个方向舵108a,机翼组件102可以包括用于控制uav的俯仰的升降舵和/或用于控制uav的滚转的副翼102a。作为另一示例,同时增大或减小所有推进器的速度可以分别导致uav 100提高或降低其海拔高度。
28.示出的固定机翼飞行器的许多变化是可以的。例如,具有更多机翼的飞行器(例如,具有四个机翼的“x
‑
机翼”构造)也是可以的。尽管图1a和图1b示出了一个机翼组件102、两个吊杆组件110、两个水平推进单元106、以及每个吊杆组件110有六个垂直推进单元112,但是应理解,可以以更多或更少的这些部件来实现uav 100的其它变型。
29.应理解,这里对“无人”飞行器或uav的引用可以等同地应用于自主和半自主飞行器。在完全自主的实现方式中,飞行器的所有功能是自动化的;例如,通过实时计算机功能进行预编程或控制,该实时计算机功能响应来自各种传感器的输入和/或预定信息。在半自主的实现方式中,飞行器的一些功能可以由人类操作者控制,而其它功能自主地执行。此外,在一些实施方式中,uav可以被配置为允许远程操作者接管原本可由uav自主控制的功能。此外,给定类型的功能可以在一个抽象级别上被远程控制,而在另一个抽象级别上自主执行。例如,远程操作者可以控制针对uav的高级导航决策,诸如指定uav应从一个位置行进到另一个位置(例如,从郊区的仓库到附近城市的递送地址),而uav的导航系统自主地控制更精细粒度的导航决策,诸如在两个位置之间采取的特定路线、用于实现该路线以及在导航该路线的同时避开障碍物的特定飞行控制等。
30.图2是根据本公开的一实施方式的uav 100的结构机架200(也称为“结构h
‑
框架”或“h
‑
框架”)的透视图图示。h
‑
框架200包括机翼翼梁203和吊杆214。在一些实施方式中,机
翼翼梁203和吊杆214可以由碳纤维、硬塑料、铝、轻金属合金等制成。机翼翼梁203和吊杆214与翼梁
‑
吊杆接合器216机械地连接。翼梁
‑
吊杆接合器216是将机翼翼梁103以“易碎”设计夹紧到吊杆214的机械接合器。机翼翼梁203可以包括用于安装水平推进单元106的预钻孔218,吊杆承载件214可以包括用于安装垂直推进单元112的预钻孔(被马达座架220隐藏)。在所示实施方式中,机身104用夹紧到机翼翼梁203上的翼梁接合器235可移除地附接到h
‑
框架。
31.机械接合器216和/或235可以是易碎结构,其被设计为在发生灾难性撞击或坠毁着陆的情况下断开以使链接的结构之间的动能解耦。通过从吊杆214和/或机翼翼梁203转移走撞击能量,这种受控的故障模式在uav 100坠毁着陆的情况下提高安全性并减少财产损失。
32.在一实施方式中,机身104包括模块化机身,该模块化机身包括用于容纳为uav供电的电池的电池模块205、容纳与uav的任务相关的设备的任务有效载荷模块210、以及用于容纳uav的飞行控制电路的航空电子设备模块215。电池模块205、任务有效载荷模块210和航空电子设备模块215被成形为彼此固定,以形成与机械固定到机翼组件102或吊杆组件110相分离的连续且可操作的机身。这使得模块化的机身104能够独立于机翼组件102和吊杆组件110上的空气动力学结构和系统进行组装和操作测试。模块化进一步能够实现磨损或损坏的模块的轻松更换、为给定的uav任务或飞行掉换模块(例如,任务有效载荷模块)、或更新特定模块而无需更换整个uav。
33.图3a是根据本公开的一实施方式的uav 100的马达300的透视图图示。图3b是根据本公开的一实施方式的马达300的局部分解透视图图示。马达300可以是包括在uav 100的推进单元106、推进单元112、任务有效载荷模块210等中的马达。马达300可以包括电动马达、无刷马达、直流(dc)马达、交流(ac)马达、有刷马达等。uav 100中包括的马达可以彼此相同或不同。
34.在一实施方式中,轴302在马达300的第一侧(例如,顶侧)之上和之下延伸。轴302在第一侧之上的第一部分被配置为与uav 100的将被施加或提供机械动力的推进器或其他结构物理联接。轴302的与第一部分相反的第二部分在第一侧之下位于转子304内。马达300的与第一侧相反的第二侧(例如,底侧)包括底座310。马达300还包括转子304和定子306。转子304被配置为环绕定子306、由定子306支撑并由定子306旋转。
35.如图3b所示,轴302的第二部分从转子304的中心延伸并被配置为插入到定子306的对应的轴接收空间314中。设置在转子304和定子306之间的是位于定子306的表面316上的多个轴承(未示出)。转子304的内侧(例如,与轴302的轴线平行的侧面)包括多个磁体312。定子306的周界(例如,与轴302的轴线平行的侧面)包括多个铜绕组308。多个磁体312被配置为环绕多个铜绕组308并与多个铜绕组308隔开小的间隙。
36.由定子306的多个铜绕组308产生的磁场导致转子304的多个磁体312绕多个铜绕组308旋转。这样的旋转进而使转子304整体以及轴302旋转,从而向物理地联接到轴302的第一部分的结构提供机械动力。
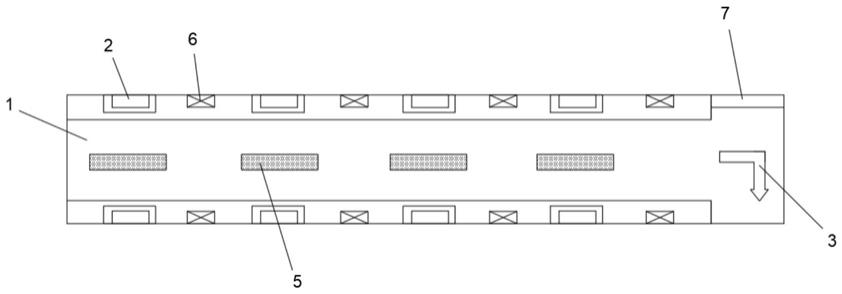
37.图4示出了根据本公开的一实施方式的用于uav的示例储存设施。本领域技术人员将理解,图4中描绘的一个或更多个部件/特征可以根据本公开的各种实施方式被省略。
38.图4示出了在结构的相反侧具有分离的进入点和外出点(例如,可以打开和关闭的
窗)的封闭的储存设施431。还描绘了用于uav的控制系统的部分,包括网络433、存储435、控制器或计算设备437(例如,分布式系统中的服务器、本地计算机、其组合等)和通信系统439(例如,射频(rf)收发器、wi
‑
fi收发器、蓝牙等)。还描绘了充电垫402
‑
408和暂存区(staging area)443。
39.在一实施方式中,充电垫402包括对于分别安置uav可用的未占用的充电垫和/或着落垫。充电垫404、406和408包括分别处于第一状态、第二状态和第三状态的uav所在的充电垫/着落垫位置。位于暂存区443中的uav包括指定用于特定动作或活动的uav。作为示例但不作限制地,处于第一状态的uav包括指定为停止服务的uav、指定为待检修的uav、针对即将发生的马达故障而被标记的uav等,如将在此详细描述的。处于第二状态的uav包括充了部分电且正在充电垫406处进行电池充电(或其他电力补充)的uav。处于第三状态的uav包括充满电的uav。暂存区443可以包括为出于它们的预期目的的部署作好准备的uav、被选择用于测试的uav等。
40.音频捕获设备460、462之一或两者也可以被包括在储存设施431中。音频捕获设备460、462被配置为捕获或接收从进入储存设施431、离开储存设施431和/或在储存设施431内的uav发出的声音。由音频捕获设备460、462捕获的声音包括经由通信系统439提供给计算设备437的音频数据。音频捕获设备460、462各自可以包括位于一个或更多个位置的一个或更多个音频捕获设备。音频捕获设备460和/或462可以组成较大系统(诸如安保系统、视听系统等)的部分。音频捕获设备460靠近进入点、外出点等安置以捕获当uav进入或离开储存设施431时从uav发出的声音。音频捕获设备462靠近充电垫402
‑
408安置以捕获从储存设施431内的uav发出的声音。在一些实施方式中,如果音频捕获设备460或462中的一个被实现,则音频捕获设备462或460中的另一个可以是可选的。
41.在所示实施方式中,uav的控制系统经由包括在通信系统439中的接收器从uav中的一个或更多个接收状态更新、音频数据或其他信息。控制系统可以基于接收到的信息利用控制器437计算用于uav中的一个或更多个的移动指令。然后,控制系统可以使用通信系统439向uav中的所述一个或更多个发送移动指令,并且移动指令包括用于在储存设施431内将uav中的特定uav从第一位置移动到第二位置的方向。
42.例如,如果位于储存设施431内的uav 100包括捕获从uav 100的机载马达发出的声音或音频的一个或更多个音频捕获设备(例如,麦克风),则捕获到的音频数据可以被提供给控制系统。响应从uav 100捕获的音频数据的移动指令可以包括例如用于使uav 100移动到储存设施431的一区域(例如,移动到充电垫404)的指令,存储设施431的该区域被指定用于uav检修、uav维护、指定为不用于递送的uav等。
43.由于上述原因,可以提供移动指令以重新排列uav。在一些实施方式中,音频数据被分析并且控制系统可以确定特定uav的一个或更多个马达是否正在经历即将发生的故障、在正常参数之外操作、导致马达故障的操作周期数等。实际的马达故障可能导致uav发生故障、导致uav过度损坏和/或以其他方式对uav的任务产生不利影响。因此,可以制订本质上具有前瞻性的移动指令,诸如指定某些uav被检修或不用于正常操作,并使这些指定的uav定位到充电垫404或储存设施431的其他(多个)特定区域。
44.尽管储存设施431被描绘为具有位于不同侧的进入点和外出点,但是进入点和外出点两者可以位于同一侧和/或包括相同的开口被考虑到。储存设施431可以包括敞开区域
或没有顶部的结构,而不是所描绘的封闭结构。在这种情况下,可以省略进入点和外出点。
45.图5示出了根据本公开的一实施方式的关于自动马达故障检测和分析实现的设备的框图。音频捕获设备500经由网络504与计算设备502直接通信或间接通信。
46.在一实施方式中,音频捕获设备500被配置为捕获、接收和/或感测在一个或更多个马达的操作(例如,活动状态)期间从所述一个或更多个马达发出或由所述一个或更多个马达产生的声音。被监测的(多个)马达包括诸如马达300的马达、包括在uav 100的推进单元106中的马达、包括在uav 100的推进单元112中的马达、包括在uav 100的有效载荷模块中的马达和/或uav 100的其他马达。
47.音频捕获设备500包括一个或更多个设备。音频捕获设备500可以组成uav 100的部分和/或在uav 100的外部。例如但不作限制地,音频捕获设备500可以包括被包括在uav 100的外表上的音频捕获设备150和/或152(见图1a)、与储存设施431相关联的音频捕获设备460和/或462等。音频捕获设备500可以包括专用音频感测设备或者可以是系统的部分。例如,音频捕获设备500可以包括(专用)麦克风、安保系统的部分、安保相机的部分、音频/视觉系统的部分、物联网(iot)设备的部分等。在一实施方式中,音频捕获设备500中的给定一个被配置为捕获来自(多个)马达中的感兴趣的特定一个的音频。在其他实施方式中,音频捕获设备500中的给定一个被配置为捕获来自多个马达的音频,其中与所述多个马达中的每个相应马达相关联的音频来自被收集以由计算设备502识别的总音频数据。
48.计算设备502被配置为从音频捕获设备500接收音频数据,并执行与即将发生的马达故障的检测相关联的处理、分析和/或确定,如下面关于图6
‑
8详细描述的。在一实施方式中,马达故障检测逻辑被包括在计算设备502中以执行这样的处理、分析和/或确定。马达故障检测逻辑可以被实现为软件,该软件包括将要由计算设备502(和/或如果计算设备502资源受限或者处理将被远程执行或由中央处理单元执行,则由远程定位的服务器/计算设备)中包括的一个或更多个处理器运行的一个或更多个指令。在替代的实施方式中,马达故障检测逻辑(或其一部分)可以被实现为固件或硬件,诸如但不限于包括在计算设备502(和/或远程定位的服务器/计算设备)中的专用集成电路(asic)、可编程阵列逻辑(pal)、现场可编程门阵列(fpga)等。
49.计算设备502包括一个或更多个设备,并靠近或远离将要从其接收音频数据的音频捕获设备500安置。计算设备502可以组成uav 100的部分和/或与uav 100分离。例如但不作限制地,计算设备502包括uav 100的航空电子设备模块中包括的处理器、uav 100中包括的处理器、控制器或计算设备437、中央远程处理器等。计算设备502包括一个或更多个计算机、工作站、服务器、膝上型电脑、处理器、智能电话、平板电脑等。计算设备502可以包括专用于马达故障的检测和相关功能的设备、或作为系统的一部分和/或配置为执行马达故障检测以及其他处理功能的设备。
50.在一实施方式中,音频捕获设备500和计算设备502可以是彼此相同或不同的设备。在一实施方式中,每个音频捕获设备500与特定的计算设备502相关联。在一实施方式中,单个计算设备502被配置为从音频捕获设备500中的多于一个的音频捕获设备接收音频数据。换言之,对于uav 100,音频捕获设备500的数量对计算设备502的数量可以是一对一、一对多或多对一。对于多个uav(诸如可以由储存设施431处置的多个uav),音频捕获设备500的数量对计算设备502的数量同样是一对一、一对多或多对一。
51.网络504包括一个或更多个交换机、路由器、防火墙、网关、中继器、转发器(repeater)、互连、网络管理控制器、服务器、存储器、处理器和/或配置为互连和/或促进音频捕获设备500和计算设备502之间的通信的其他部件。网络504也可以被称为架构(fabric)、计算架构或云。
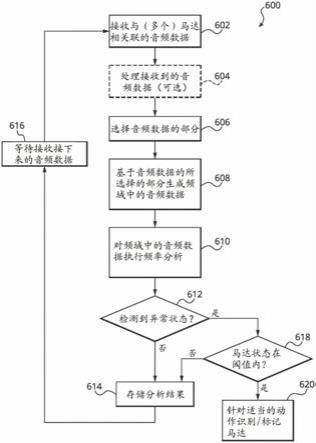
52.图6示出了根据本公开的一实施方式的示例过程600,该示例过程600由计算设备502实现以执行即将发生的马达故障检测以及与uav 100中包括的一个或更多个马达的检测到的状态有关的相关活动。
53.在块602处,计算设备502被配置为接收由音频捕获设备500检测到的与一个或更多个马达相关联的音频数据。音频数据包括在(多个)马达的操作期间从一个或多个特定的马达发出的音频或声音,该音频或声音由音频捕获设备500检测并存储。音频数据包括一定持续时间的连续或离散的音频样本。音频数据包括时域中的数据,并且可以包括相关信息,诸如时间戳、音频捕获设备标识符、(多个)马达标识符等。
54.如关于图5所述,在一实施方式中,音频捕获设备500和计算设备502两者可以被包括在uav 100中,并且uav 100可以执行关于其(多个)马达的自诊断。或者音频捕获设备500可以被包括在uav 100中,并且计算设备502位于uav 100外部,且来自音频捕获设备500的音频数据经由网络504或其他通信机制被提供给计算设备502。替代地,音频捕获设备500和计算设备502两者远离uav 100安置以检测uav 100的(多个)马达的故障。
55.在块604处,响应于音频数据的接收,计算设备502被配置为根据需要处理接收到的音频数据。示例处理包括但不限于滤波、去噪、转换为不同的音频格式等。如果音频数据包括多于一个马达的数据,则计算设备502被配置为确定和分离相应马达中的每个的音频数据。例如,基于与音频数据的相应部分相关联的不同方向性信息、用于不同类型的马达的不同音频简档、相应马达相对于音频捕获设备500的位置信息等,计算设备502能够区分不同马达之间的音频数据。作为另一示例,uav 100中包括的控制器可以被配置为在彼此不同的时间引起每个马达的脉动或振荡,以临时提高(或以其他方式改变)每个马达的频率或声级;多个音频捕获设备500可以用于促进马达声音的三角测量,并扩展地促进对不同马达之间的音频数据的区分;uav 100可以相对于单个音频捕获设备500移动以允许对劣化的马达的识别,其中uav 100的每个马达在时间上依次被放置在该单个音频捕获设备500附近;等等。在一些实施方式中,如果不需要处理音频数据,则块604可以是可选的。
56.接下来,在块606处,计算设备502被配置为选择或提取音频数据的与一马达相关联的特定部分以供分析(或者,如果该音频数据与多个马达相关联,则选择或提取音频数据的关于每个马达的特定部分)。音频数据的所选择的部分可以是音频数据的预设/标称时间间隔、或与预设/标称时间间隔不同或从其偏移的时间间隔。例如,音频数据可以包括2分钟的音频数据,并且预设/标称时间间隔是音频数据在音频样本/片段(clip)的时间点0:20
‑
0:30处的10秒部分。如果由于噪声、风、干扰、低数据质量等认为时间点0:20
‑
0:30处的数据是不理想的,则可以选择不同时间点,诸如音频样本/片段的时间1:20
‑
1:30处。可以从音频样本/片段中选择各种时间点和/或时间间隔中的任何一个。作为另一示例,(多个)马达以一致或可重复的转速操作时的音频数据(或音频数据的部分)被记录和分析,以便促进跨越时间的在马达和/或uav之间的比较。
57.在块608处,计算设备502将音频数据的所选择的部分从时域转换为频域以生成频
域中的音频数据。离散傅立叶变换,特别是快速傅立叶变换(fft),被应用于音频数据的所选择的部分以生成频域中的音频数据。
58.图7描绘了示出根据本公开的一实施方式的在频域中的音频数据的示例曲线的曲线图。曲线702
‑
712表示同一马达的在频域中的音频数据。曲线702
‑
712表示在马达的各个不同的寿命周期点、在马达的各个不同的累积操作周期、在马达的各个不同的累积操作时间、或在马达的各个不同的操作时间点处的在频域中的音频数据。频域中的当前音频数据(来自块608)的幅度相对于频率的曲线可以是曲线702
‑
712中的任何一个。
59.在块610处,计算设备502被配置为分析在块608处生成的在频域中的音频数据以确定与马达故障相关联的一个或更多个特征。该分析可以包括结合同一马达的在频域中的一个或更多个其他音频数据(例如,从同一马达的之前的音频数据)分析在频域中的音频数据。在一实施方式中,对于给定的马达,频域中的音频数据的随时间的特定变化指示即将发生的马达故障(例如,马达是否处于异常状态、快要故障状态或故障临近)以及与频域中的当前音频数据相关的对马达距离(实际上)发生故障的接近程度的预测。在一实施方式中,使用汉明窗技术和2048个箱(bin)来执行对频域中的每个音频数据(例如,与来自块606的音频数据的所选择的部分或间隔对应的数据)的频率分析。
60.作为示例,计算设备502可以分析同一马达的在频域中的多个音频数据,诸如图7所示。在图7中,曲线702
‑
712分别与故障之前剩余的12016、4816、1216、495、106和1个操作周期处的同一马达相关联。在一实施方式中,以两个频率为中心的曲线的幅度与马达故障之前剩余的操作周期数成反比地增大。新的峰720和722在峰730和732之间的频率处出现或开始出现,峰730和732贯穿马达的寿命周期持续存在(见曲线702
‑
712的每个中的峰730和732的存在)。大约在马达寿命的最后10%之内或者如果马达具有在(实际)故障之前剩余的大约500至1000个操作周期,出现峰720和722。
61.在图7中,可以看出,在曲线708(例如,其与故障之前剩余的495个操作周期相关联)、曲线710(例如,其与故障之前剩余的106个操作周期相关联)和曲线712(例如,其与故障之前剩余的1个操作周期相关联)中存在可观幅度的峰720和722。随着马达距离发生故障越来越近,峰720和722的幅度也随时间增大(例如,峰720和722在曲线712中比在曲线710中具有更大的幅度)。峰720和722的中心频率分别在大约1200和1600赫兹(hz)处。理解的是,对于不同的马达或不同的操作简档(例如,不同的转速),中心频率值可以不同于1200和1600hz。
62.根据本公开的一实施方式,曲线702
‑
712的区域724在图8中被示出为作为故障之前剩余的操作周期或故障之前剩余的操作时间的函数的最大与最小幅度比的曲线802。在一实施方式中,区域724与峰722的频率相关联或针对于大约1300至1680hz的频率范围。替代地,区域724可以是峰720的频率值。
63.如图8所示,曲线802对于马达寿命的大部分是基本上水平的(例如,具有在大约3
‑
6范围内的一致的最大/最小幅度比),但然后随着马达接近故障而快速增大。当马达在故障之前大约500个操作周期内(或在故障之前大约10小时的操作内)时,出现曲线802的与快速增大的幅度比相关联的部分804。曲线802的部分804以大约50的比率开始并以大约300的比率结束。马达距离发生故障越近,幅度比值越大。对于稍后针对要监测的每个马达获取的每种不同的马达类型、型号或配置,可以存在类似于曲线802的曲线、数据点或其他数据等同
形式。
64.因为频域中的音频数据是一特定马达在该特定马达的特定操作周期的音频数据,所以计算设备502可以基于该特定马达的标识符信息来执行查找,以选择与该特定马达的类型、型号或配置匹配的最大/最小幅度比相对于故障之前剩余的操作周期/时间的特定曲线(或数据等同形式)。然后,使用这样的特定曲线,计算设备502基于该特定马达的当前最大/最小幅度比值针对该特定马达预测故障之前剩余的操作周期和/或时间的当前数量。
65.基于来自频域中的当前音频数据的当前最大/最小幅度比,计算设备502可以确定马达是否在异常或故障临近状态下操作;如果处于异常/故障临近状态,则确定距离发生故障的接近程度(例如,故障之前剩余的操作周期数、故障之前剩余的操作时间数);等等。在一实施方式中,马达故障可能归因于转子304和定子306之间的轴承的横向移动,这导致转子304的磁体312和定子306的绕组308之间的物理接触和摩擦。该物理接触和摩擦随着时间的推移逐渐增加,直到发生马达故障。
66.在其他实施方式中,计算设备502被配置为基于仅对频域中的当前音频数据的分析来确定马达是否处于异常/故障临近状态和/或距离发生故障的接近程度。例如,如果在频域中的当前音频数据中存在诸如峰720和722的峰,并且这些峰具有高于与感兴趣的马达的特定类型或型号相关联的预设阈值的幅度,则计算设备502可以使用这样的信息来做出关于马达的故障确定。
67.在另一实施方式中,推进器损坏、劣化或结垢也可以通过如在此描述的类似音频分析来检测。
68.随着在块610处完成频率分析,如果没有检测到异常/故障临近状态(块612的“否”分支),则过程600进行到块614以存储分析结果并在块616处等待接收相同的(多个)马达的接下来的音频数据。然后,过程600进行为返回到块602以针对即将来临的故障而继续监测(多个)马达。如果检测到异常/故障临近状态(块612的“是”分支),则过程600进行到块618。例如,如果马达的当前最大/最小幅度比值高于阈值(例如,大于50),则认为马达处于异常/故障临近状态。
69.在块618处,计算设备502被配置为确定马达的当前状态是否使得马达并扩展地使得uav 100应该针对一个或更多个动作或限制而被标记。在一实施方式中,在块618处,可以将马达的基于当前最大/最小幅度比值预测的在故障之前剩余的操作周期数或操作时间数与预设阈值进行比较。预设阈值可以在不同的马达之间是相同的;可以基于不同的马达类型、型号或配置而不同;如果被标记则可以取决于要对马达并扩展地对uav 100采取的动作来选择预设阈值;等等。例如,如果目标是对检修或维护持保守态度使得不发生实际故障,则可以选择预设阈值以在实际故障可能发生很久之前标记马达,也许一检测到马达故障的第一次指示就标记马达,诸如500个操作周期的预设阈值。作为另一示例,如果目标是最大化马达的操作而不使它们过早退役,则预设阈值可以设置得更接近于剩余的马达操作周期将达到零的时间,诸如等于100个操作周期的预设阈值。
70.如果预测的在故障之前剩余的操作周期数大于预设阈值(块618的“否”分支),则过程600进行到块614以继续监测。如果预测的在故障之前剩余的操作周期数等于或小于预设阈值(块618的“是”分支),则过程600进行到块620。
71.在块620处,计算设备502被配置为标记、识别、分类、指定或以其他方式生成特定
马达并扩展地包括该特定马达的uav 100将服从于与正常操作不同的(多个)适当动作的指示。凭借检测和预计马达故障的能力,此类被标记的uav 100可以退役以降低如果被允许继续操作则可能发生的危害的机率,可以被限制以免于正常使用或从正常使用中移除以进行预防性检修或维护,或者可以被指定为仅用于短距离任务或其他非标准用途。安全性提高并且与uav的过早退役、uav在意外紧急着陆位置的取回、归因于马达故障的由uav造成的损坏等相关联的成本降低。
72.图9描绘了根据一些实施方式的可在本公开的uav 100、计算设备437或502、存储435和/或音频捕获设备150、152、460、462或500中实现的示例设备。图9的设备可以组成uav 100、计算设备437或502、存储435和/或音频捕获设备150、152、460、462或500中的任何一个的至少一部分。如图所示的平台900包括用于传送信息的总线或其他内部通信装置915、以及联接到总线915以用于处理信息的处理器910。该平台还包括联接到总线915以用于存储将要由处理器910运行的信息和指令的随机存取存储器(ram)或其他易失性存储器件950(替代地,这里称为主存储器)。主存储器950还可以用于在处理器910运行指令期间存储临时变量或其他中间信息。平台900还包括联接到总线915以用于存储给处理器910的静态信息和指令的只读存储器(rom)和/或静态存储器件920、以及数据存储器件925,诸如磁盘、光盘及其对应的盘驱动器或便携式存储器件(例如,通用串行总线(usb)闪速驱动器、安全数字(sd)卡)。数据存储器件925联接到总线915以用于存储信息和指令。
73.平台900还可以联接到通过总线965联接到总线915以用于向用户显示信息的显示设备970,诸如液晶显示器(lcd)或发光二极管(led)显示器。包括字母数字键和其他键的字母数字输入设备975也可以通过总线965(例如,经由红外(ir)或射频(rf)信号)联接到总线915以用于将信息和命令选择传送给处理器910。附加用户输入设备是通过总线965联接到总线915以用于将方向信息和命令选择传送给处理器910并用于控制显示设备970上的光标移动的光标控制设备980,诸如鼠标、轨迹球、触控笔或光标方向键。在利用触摸屏界面的实施方式中,理解的是,显示器970、输入设备975和光标控制设备980可以全都集成到触摸屏单元中。
74.可以可选地联接到平台900的另一部件是用于经由网络访问分布式系统的其他节点的通信设备990。通信设备990可以包括许多市售联网外围设备中的任何一个,诸如用于联接到以太网、令牌环、互联网或广域网的那些外围设备。通信设备990还可以是零调制解调器连接、或提供平台900和外部世界之间的连接的任何其他机制。注意,图9所示的该系统的任何或所有部件及相关硬件可以用于本公开的各种实施方式。
75.以上说明的过程在计算机软件和硬件方面被描述。所描述的技术可以构成体现在有形或非暂时性的机器(例如,计算机)可读存储介质中的机器可运行指令,当由机器运行时,该机器可运行指令将使机器执行所描述的操作。另外,过程可以体现在诸如专用集成电路(asic)等的硬件中。
76.有形的机器可读存储介质包括提供(例如,存储)机器(例如,计算机、网络设备、个人数字助理、制造工具、具有成组的一个或更多个处理器的任何设备等)可访问的非暂时性形式的信息的任何机制。例如,机器可读存储介质包括可记录/不可记录的介质(例如,只读存储器(rom)、随机存取存储器(ram)、磁盘存储介质、光学存储介质、闪存器件等)。
77.本发明的所示实施方式的以上描述,包括摘要中描述的内容,不旨在穷举或将本
发明限制为所公开的精确形式。虽然这里出于说明目的描述了本发明的特定实施方式和示例,但是相关领域的技术人员将认识到,在本发明的范围内可以进行各种各样的修改。
78.可以根据以上详细描述对本发明进行这些修改。在所附权利要求中使用的术语不应被解释为将本发明限制为说明书中公开的特定实施方式。而是,本发明的范围将完全由所附权利要求确定,所附权利要求将根据权利要求解释的既定原则来解释。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。