1.本发明属于物资盘点技术领域,具体涉及为仓库无人机盘点装置。
背景技术:
2.在企业日常经营过程中,需要对很多物资提前购买,进行存储。同时为了避免物资堆积,实时掌握存储的物资使用情况,需要定期对物资进行盘点。而在仓库中,为了提高空间的利用效率,物资存放的货架高度很高,分为多层。为了盘点最上方的物资,通常需要工作人员借助梯子等工具,提高了物资盘点的劳动强度,降低了工作效率。
技术实现要素:
3.本发明要解决的技术问题是:克服现有技术的不足,提供一种仓库无人机盘点装置,本发明通过无人机对物资进行盘点,物资高度不限,提高了工作效率。
4.本发明解决现有技术存在的问题所采用的技术方案是:
5.仓库无人机盘点装置,包括无人机,所述的无人机底部设有侧端敞口布置的放置盒,放置盒内部设有读取器,读取器对货架上的物资进行识别。
6.无人机上方设有一个环状的防护圈,防护圈与无人机的螺旋桨位于同一平面内,无人机的螺旋桨均位于防护圈内部。
7.无人机顶面上固定有报警器,报警器内部设有弧形腔,弧形腔内壁上镶设有漏斗形的触板。
8.报警器内部位于弧形腔的正上方设有球,球下方同轴布置有接触杆,接触杆末端位于触板下方开口处。
9.球上方同轴固定有垂直杆,垂直杆与防护圈同轴布置,垂直杆顶端通过若干根第一连接杆与防护圈固定连接。
10.触板与无人机控制系统电性连接。
11.优选的,所述的读取器为照相机或射频标签读卡器或二维码、条形码扫码器。
12.优选的,货架上端边沿上固定有水平布置的上导轨,上导轨底面向上内凹有第三滑槽。
13.第三滑槽内部滑动设有上滑块,上滑块上穿设有与其螺纹连接的第二螺杆,第二螺杆与上导轨平行布置,第二螺杆末端设有第三电机,第三电机与上导轨或货架固定连接。
14.上滑块底面固定有第二电机以及滑杆,第二电机输出轴垂直朝下设置、并固定有第一螺杆,第一螺杆与滑杆平行布置。
15.上导轨背离货架的一端设有平台,所述的平台套设于第一螺杆以及滑杆外部,第一螺杆与平台螺纹连接。
16.平台顶面水平布置,无人机降落在平台上。
17.优选的,货架下端边沿上固定有下导轨,下导轨顶面内凹有第二滑道,第二滑道内部滑动设有下滑块。
18.第一螺杆底部穿设至下滑块内部、并与其转动连接。
19.滑杆底部与下滑块转动连接或固定连接。
20.优选的,第一螺杆两侧各设有一根滑杆。
21.所述的平台朝向第一螺杆一端的中心位置设有中间杆,中间杆上设有螺孔,螺孔与第一螺杆螺纹连接。
22.中间杆两侧各设有一个侧杆,侧杆上设有滑孔,滑杆穿过滑孔。
23.侧杆底面低于平台的底面,侧杆底面与平台底面之间固定有倾斜布置的支撑板。
24.优选的,所述的平台上设有通孔,通孔上方罩设有四边形的框架,框架相对的两个端面内部设有第一推板、另外相对的两个端面内部设有第二推板。
25.平台下方固定有第一伸缩杆以及第二伸缩杆,第一伸缩杆末端与第一推板底部固定连接,第二伸缩杆末端与第二推板底部固定连接。
26.第一推板宽度小于其所在框架端面的宽度,第二推板宽度与其所在框架端面内壁的宽度相同。
27.放置盒底部设有水平板,水平板中心下方垂直设有导向柱,水平板长度大于框架上端开口的宽度,导向柱直径小于框架上端开口的宽度。
28.无人机降落在平台上时,水平板搭放在框架顶部,导向柱插入至框架内部。
29.优选的,第一推板以及第二推板均镶设于框架内壁中,第一推板宽度大于导向柱的直径1~3mm。
30.框架内壁位于第一推板两侧的位置内凹有水平布置的第一滑道,第一滑道与第一推板侧壁之间设有隔板,第二推板两端均设有滑块,滑块滑动设置于第一滑道内部。
31.优选的,框架外部套设有转环,转环与平台转动连接,转环轴线与框架中心线重合,
32.转环顶面内凹有两条弧形槽,弧形槽的弧度为120
°
~170
°
。
33.水平板两侧下方各垂直设有一根摆正杆,摆正杆为圆柱形杆,其直径小于弧形槽的宽度,两个摆正杆分别插设于弧形槽内部。
34.转环外侧圆周面上套设有齿圈,齿圈与齿轮啮合连接,平台上固定有第一电机,第一电机输出轴带动齿轮转动。
35.第一电机与无人机控制系统无线连接。
36.优选的,所述的导向柱高度大于摆正杆的高度。
37.转环外侧圆周面的底部凸设有环状的凸盘,凸盘上方设有环状压板,环状压板外侧圆周面与平台顶面固定连接。
38.优选的,至少一个滑孔内壁上凸设有电刷,穿过该滑孔的滑杆圆周面上内凹有导电轨,导电轨垂直布置,电刷与导电轨电性连接,
39.电刷与第一电机、第一伸缩杆、第二伸缩杆电性连接,
40.框架底部下方设有底板,底板通过若干根第二连接杆与平台固定连接,底板上方凸设有插头,插头与电刷电性连接,
41.导向柱下方设有插孔,
42.无人机停放在平台上时,插头插入到插孔内部,对无人机电池进行充电,
43.下导轨的第二滑道下方凹设有线槽,线槽内部设有电线,电线一端与导电轨电性
连接,另一端通过远程控制开关与电源电性连接。
44.与现有技术相比,本发明所具有的有益效果:
45.(1)通过无人机对物资进行盘点,物资高度不限,提高了工作效率。
46.(2)无人机上方设有防护圈,可有效避免无人机螺旋桨碰撞到物品上。
47.(3)货架前方设有可移动的平台,无人机盘点时可降落到平台上,降低无人机对导航系统的依赖。
48.(4)平台上增设充电系统,可对无人机进行充电。
附图说明
49.下面结合附图和实施例对本发明进一步说明。
50.图1为本发明仓库无人机盘点装置中无人机俯视立体图,
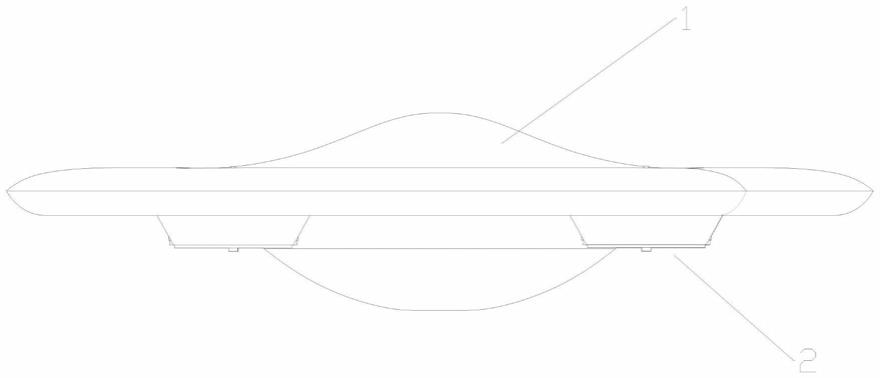
51.图2为本发明仓库无人机盘点装置中无人机底视立体图,
52.图3为本发明仓库无人机盘点装置中无人机第一剖视图,
53.图4为本发明仓库无人机盘点装置中无人机第二剖视图,
54.图5为图4中a处局部放大图,
55.图6为本发明仓库无人机盘点装置中平台俯视图,
56.图7为本发明仓库无人机盘点装置中平台底视图,
57.图8为本发明仓库无人机盘点装置中平台第一剖视图,
58.图9为本发明仓库无人机盘点装置中平台第二剖视图,
59.图10为本发明仓库无人机盘点装置中平台第三剖视图,
60.图11为图10中b处局部放大图,
61.图12为本发明仓库无人机盘点装置中无人机与平台结合后第一效果图,
62.图13为本发明仓库无人机盘点装置中无人机与平台结合后第二效果图,
63.图14为本发明仓库无人机盘点装置与货架组装后效果图,
64.图15为本发明仓库无人机盘点装置平台与导轨结合后第一效果图,
65.图16为本发明仓库无人机盘点装置平台与导轨结合后第二效果图,
66.图17为本发明仓库无人机盘点装置下导轨截面图,
67.图18为本发明仓库无人机盘点装置上导轨截面图。
68.图中:1
‑
无人机、2
‑
放置盒、3
‑
读取器、4
‑
水平板、5
‑
导向柱、501
‑
插孔、6
‑
摆正杆、7
‑
防护圈、701
‑
第一连接杆、702
‑
垂直杆、703
‑
球、704
‑
接触杆、8
‑
报警器、801
‑
弧形腔、802
‑
触板、9
‑
平台、901
‑
侧杆、9011
‑
滑孔、902
‑
支撑板、903
‑
中间杆、9033
‑
螺孔、10
‑
框架、1001
‑
第一滑道、11
‑
第一推板、1101
‑
第一伸缩杆、12
‑
第二推板、1201
‑
第二伸缩杆、13
‑
转环、1301
‑
弧形槽、1302
‑
凸盘、14
‑
环状压板、15
‑
齿轮、1501
‑
第一电机、16
‑
底板、1601
‑
插头、1602
‑
第二连接杆、17
‑
电刷、18
‑
第一螺杆、1801
‑
第二电机、19
‑
滑杆、1901
‑
导电轨、20
‑
上滑板、2001
‑
凸块、21
‑
下滑板、22
‑
下导轨、2201
‑
第二滑道、2202
‑
线槽、23
‑
上导轨、2301
‑
第三滑槽、24
‑
第二螺杆、25
‑
第三电机、26
‑
货架。
具体实施方式
69.附图为该仓库无人机盘点装置的最佳实施例,下面结合附图对本发明进一步详细
的说明。
70.仓库无人机盘点装置,包括无人机1,所述的无人机1底部设有侧端敞口布置的放置盒2,放置盒2内部设有读取器3,读取器3的信号接收端(例如天线)朝向放置盒2的敞口处,或通过敞口处伸出。读取器3对货架26上的物资进行识别,所述的读取器3为照相机或射频标签读卡器或二维码、条形码扫码器。读取器3采用照相机时,需要将拍摄的照片回传到系统中,然后再用系统中的图片分析软件进行分析,识别图片中的内容,进行货物盘点。成本高、较为复杂。因此本实施例中,读取器3采用射频标签读卡器或二维码、条形码扫码器,物资上固定有射频标签或二维码或条形码。
71.无人机1上方设有一个环状的防护圈7,防护圈7与无人机1的螺旋桨位于同一平面内,无人机1的螺旋桨均位于防护圈7内部,防护圈7的轴线与无人机1的中心线重合。
72.无人机1顶面上固定有报警器8,报警器8内部设有弧形腔801,弧形腔801内壁上镶设有漏斗形的触板802,触板802与无人机1的控制系统电性连接,无人机1内部电池为触板802提供工作所需电源。
73.报警器8内部位于弧形腔801的正上方设有球703,球703下方同轴布置有接触杆704,接触杆704末端位于触板802下方开口处。
74.球703上方同轴固定有垂直杆702,垂直杆702与防护圈7同轴布置,垂直杆702顶端通过若干根第一连接杆701与防护圈7固定连接。
75.当无人机1移动时,防护圈7碰撞到物品,收到冲击,防护圈7围绕其轴线产生移动,即球703发生转动,使得接触感704碰撞到触板802,产生信号,可根据触板802哪个区域受到挤压判断无人机1那边有物品干涉,进而控制系统控制无人机1向想法的方向移动。
76.当无人机1脱离物品时,防护圈7需要复位。为了使其能够复位,在接触杆704顶端或垂直杆702圆周面上,均布有至少4根拉簧,拉簧4另一端与无弧形腔801内壁或人机1顶面固定连接。
77.货架26上端边沿上固定有水平布置的上导轨23,上导轨23底面向上内凹有第三滑槽2301。第三滑槽2301内部滑动设有上滑块20,上滑块20上凸设有凸块2001,凸块2001上穿设有与其螺纹连接的第二螺杆24,第二螺杆24与上导轨23平行布置,第二螺杆24末端设有第三电机25,第三电机25与上导轨23或货架26固定连接。
78.上滑块20底面固定有第二电机1801以及滑杆19,第二电机1801输出轴垂直朝下设置、并固定有第一螺杆18,第一螺杆18与滑杆19平行布置。本实施例中,第一螺杆18两侧各设有一根滑杆19。
79.上导轨23背离货架26的一端设有平台9,所述的平台9朝向第一螺杆18一端的中心位置设有中间杆903,中间杆903上设有螺孔9033,螺孔9033与第一螺杆18螺纹连接。中间杆903两侧各设有一个侧杆901,侧杆901上设有滑孔9011,滑杆19穿过滑孔9011。侧杆901底面低于平台9的底面,侧杆901底面与平台9底面之间固定有倾斜布置的支撑板902,侧杆901以及支撑板902有效增加平台9的承载力。
80.平台9顶面水平布置,货物盘点时,无人机1可降落在平台9上。
81.为了增加平台9移动的稳定性,货架26下端边沿上固定有下导轨22,下导轨22顶面内凹有第二滑道2201,第二滑道2201内部滑动设有下滑块21。第一螺杆18底部穿设至下滑块21内部、并与其转动连接,滑杆19底部与下滑块21转动连接或固定连接。
82.第二电机1801带动平台9上下移动,确定其z轴坐标,第三电机25带动平台9左右移动,确定其x轴坐标,两个电机配合,使得平台9移动到货架26前方的任何位置。第二电机1801以及第三电机25均采用带减速机构的伺服电机。
83.如果无人机1上的读取器3为射频标签读卡器,那么无人机1可无需停放在平台9上即可进行货物盘点。但当无人机1上的读取器3为二维码或条形码扫描器,那么当货物盘点时,无人机1需要停留在平台9上,平台带动无人机1进行扫描。这时对无人机1停放的位置以及方向有所要求。
84.为了实现无人机的停放时,去读取器3的扫描口朝向货架26。
85.放置盒2底部设有水平板4,水平板4中心下方垂直设有导向柱5。
86.所述的平台9上设有通孔,通孔上方罩设有四边形的框架10,水平板4长度大于框架10上端开口的宽度,导向柱5直径小于框架10上端开口的宽度。无人机1降落在平台9上时,水平板4搭放在框架10顶部,导向柱5插入至框架10内部。
87.框架10相对的两个端面内部设有第一推板11、另外相对的两个端面内部设有第二推板12。
88.平台9下方固定有第一伸缩杆1101以及第二伸缩杆1201,第一伸缩杆1101末端与第一推板11底部固定连接,第二伸缩杆1201末端与第二推板12底部固定连接。
89.第一推板11宽度小于其所在框架10端面的宽度,第二推板12宽度与其所在框架10端面内壁的宽度相同。
90.第一推板11以及第二推板12均镶设于框架10内壁中,第一推板11宽度大于导向柱5的直径1~3mm。
91.框架10内壁位于第一推板11两侧的位置内凹有水平布置的第一滑道1001,第一滑道1001与第一推板11侧壁之间设有隔板,第二推板12两端均设有滑块,滑块滑动设置于第一滑道1001内部。第一滑道1001以及其内部滑块的设置,使得两个第二推板12移动至末端时,无法将导向柱5夹紧。
92.框架10外部套设有转环13,转环13轴线与框架10中心线重合。转环13外侧圆周面的底部凸设有环状的凸盘1302,凸盘1302上方设有环状压板14,环状压板14外侧圆周面与平台9顶面固定连接。转环19通过环状压板14与平台9转动连接。
93.转环13顶面内凹有两条弧形槽1301,弧形槽1301的弧度为120
°
~170
°
。
94.水平板4两侧下方各垂直设有一根摆正杆6,摆正杆6的高度小于导向柱5高度。
95.摆正杆6为圆柱形杆,其直径小于弧形槽1301的宽度,两个摆正杆6分别插设于弧形槽1301内部。
96.转环13外侧圆周面上套设有齿圈,齿圈与齿轮15啮合连接,平台9上固定有第一电机1501,第一电机1501输出轴带动齿轮15转动,第一电机1501与无人机1控制系统无线连接。
97.无人机1在自身导航作用下飞行至平台9上方,其导向柱5位于框架10敞口的方法。然后无人机1降落,框架10顶面设有与无人机1控制系统无线练得的距离传感器或在框架10内壁顶部设有红外对射光电传感器,用以检测无人机1的位置,即导向柱5伸入到框架10内部的高度,当导向柱5伸入到框架10内部的距离达到阈值时,即距离传感器检测的距离达到阈值或红外对射光电传感器检测到信号时,无人机1停止降落。然后第一推板11以及第二推
板12向框架10中心位置移动,第二推板12移动至最终位置,即第二伸缩杆1201的最大行程,两个第一推板11之间的间接大于导向柱5的直径。
98.然后无人机1继续下降设定距离,此时摆正杆6插入到弧形槽1301内部,转环13转动180
°
,带动无人机1旋转。平台9位于货架26的一端固定有用于检测的二维码或条形码,如果读取器3扫描到内容,则第一推板11继续推动,将导向柱5夹紧;如果读取器3没有扫描到内容,则转环13再次转动180
°
,此时读取器3转动到正确的方向。
99.本实施例中,平台9可对无人机1进行充电。至少一个滑孔9011内壁上凸设有电刷17,穿过该滑孔9011的滑杆19圆周面上内凹有导电轨1901,导电轨1901垂直布置,电刷17与导电轨1901电性连接。
100.电刷17为第一电机1501、第一伸缩杆1101、第二伸缩杆1201提供工作所需电源。
101.框架10底部下方设有底板16,底板16通过若干根第二连接杆1602与平台9固定连接,底板16以及导向柱5上设有相互匹配的充电装置,可采用无线充电,也可以采用有线充电。
102.采用有线充电时,底板16上方凸设有插头1601,插头1601与电刷17电性连接。导向柱5下方设有插孔501。插头1601的长度小于弧形槽1301的深度。同时插孔501底部为倒立的漏斗形,便于插头1601插入。
103.当无人机1需要充电时,先将读取器3摆正,然后第一推板11停留,不产生位移,无人机1继续下降,插头1601插入到插孔501内部,然后第一推板11产生位移,将导向柱5夹紧。
104.下导轨22的第二滑道2201下方凹设有线槽2202,线槽2202内部设有电线,电线一端与导电轨1901电性连接,另一端通过远程控制开关与电源电性连接,电源采用仓库内部电源。
105.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。