1.本发明属于无人机及锁紧机构技术领域,具体涉及一种可空中回收的折叠式旋翼无人机及回收锁紧机构。
背景技术:
2.无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。与有人驾驶飞机相比,无人机往往更适合那些太“愚钝,肮脏或危险”的任务。无人机按应用领域,可分为军用与民用。军用方面,无人机分为侦察机和靶机。民用方面,无人机 行业应用,是无人机真正的刚需;目前在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。
3.目前,全球范围内,可空中回收的无人机研究很少,尤其是真正能实现的可空中发放、可空中回收、可空中充电、可完全约束吊挂、旋翼可同步变形、扇叶磕碰保护及粗定位接口对接的旋翼式无人机未见先例。
4.目前,各种类型锁紧机构难以完成无人机空中粗定位锁紧、无人机牢固吊挂、无人机升降、无人机折叠变形、无人机充电接入等功能的集成。
技术实现要素:
5.本发明针对现有技术的不足,提出了一种可空中回收折叠式旋翼无人机,目的在于解决无人机的空中回收问题。
6.本发明为解决其技术问题,采用以下技术方案:
7.一种可空中回收折叠式旋翼无人机,其特征在于:包括带有锥形上盖13的机体6、均匀布设在机体6周围且铰接于机体6的折叠旋翼臂机构7、8、9、10、布设于机体6顶部的锁紧杆机构12、布设于机体6内部的旋翼臂折叠变形机构42、以及电源及控制机构37、39、28;所述锁紧杆机构12用于实现无人机空中回收过程中的滚动粗定位、锁紧、限位以及充电等功能;所述旋翼臂折叠变形机构42用于实现无人机折叠变形。
8.所述折叠旋翼臂机构包括四个折叠旋翼臂7、四个扇叶驱动电机8、四个扇叶保护装置9、四个扇叶10;其中四个折叠旋翼臂7均布铰接于机体6上,四个扇叶驱动电机8分别安装于各折叠旋翼臂7的末端,四个扇叶10分别安装于各折叠旋翼臂7末端以及各扇叶驱动电机8的输出轴端,四个扇叶保护装置9分别罩于各扇叶10四周,并固定于各折叠旋翼臂7末端,实现无人机扇叶10的保护,防止飞行及回收过程扇叶10发生磕碰损坏造成故障及危险。
9.所述锥形上盖13布设在机体6的上盖11上,机体6的上表面和下表面设有上盖11和下盖13,在上盖11上还固装设有锥形上盖13,锥形上盖13起到无人机锁紧回收后的定位及限位作用,以实现无人机精确定位及牢固锁定。
10.所述锁紧杆机构12包括锁紧槽17、粗定位滚轮18、锁紧杆中心正极19、锁紧杆周圈
负极20、锁紧柱21、支撑杆22;其中锁紧杆中心正极19和锁紧杆周圈负极20安装于锁紧柱21顶部,用来实现无人机接触充电功能;粗定位滚轮18均布于锁紧柱21顶部周圈,用来实现无人机粗定位以及滚动摩擦;锁紧柱21安装于支撑杆22的上端、支撑杆22安装于上盖11上,锁紧槽17开槽于锁紧柱21相应位置,用于锁紧锁紧杆12,从而锁紧可空中回收折叠式旋翼无人机2。
11.所述旋翼臂折叠变形机构42包括摆臂14、伸缩臂15、传动销钉23、螺旋盘24、支撑盘25、阿基米德螺旋槽26、直线槽27、变形电机29;所述摆臂14一端铰接于所述折叠旋翼臂7上,一端铰接于伸缩臂15上;所述螺旋盘24通过多个传动销钉23安装于支撑盘25上,螺旋盘24上开有多条阿基米德螺旋槽26,支撑盘25上开有多条直线槽27,多个伸缩臂15通过传动销钉23安装于支撑盘25的多条直线槽27上,变形电机29安装于螺旋盘24上,当变形电机29转动时,带动螺旋盘24旋转,从而带动多个传动销钉23在阿基米德螺旋槽26和直线槽27内滑动,并带动多个伸缩臂15同步伸缩,从而带动摆臂14和折叠旋翼臂7同步转动,从而实现无人机折叠变形,减少无人机空间占用。
12.所述的电源及控制机构机构,包括无人机端充电线37、无人机电池39、以及控制器28;无人机端充电线37穿过中空结构的锁紧杆机构12内部,一端连接于锁紧杆中心正极19和锁紧杆周圈负极20上,另外一端连接无人机电池39,用来实现空中回收后的无人机接触充电功能;
13.控制器28、变形电机29和无人机电池39固定于锥形上盖13的下表面相应位置,旋翼臂折叠变形机构42安装于下盖16相应位置,变形电机29的输出法兰固定于旋翼臂折叠变形机构42相应位置,从而驱动旋翼臂折叠变形机构42运动,实现无人机折叠旋翼臂7折叠变形,从而大大降低了无人机的体积,减少了回收占用空间,提高了空间利用率,降低了无人机自身摆动及转动惯量,提高了回收升降时的安全性。
14.一种喇叭形无人机回收锁紧机构,其特征在于:包括锁紧爪30、锁紧爪固定架31、中空减速器32、中空电机33、中空吊绳34、吊舱端充电线35、锁紧机构柱形壳36、锁紧机构喇叭形粗定位锥板38、锁紧机构中心正极40、锁紧机构周圈负极41;其中锁紧爪30、锁紧爪固定架31、中空减速器32和中空电机33依次串联安装组成锁紧装置,锁紧装置整体固定于锁紧机构柱形壳36上,用来实现无人机锁紧功能;
15.所述中空吊绳34安装于锁紧机构柱形壳36顶部,用于悬吊回收锁紧机构,吊舱端充电线35穿过中空减速器32、中空电机33以及中空吊绳34连接于锁紧爪固定架31上的锁紧机构中心正极40和锁紧机构周圈负极41上,另一端连接于吊舱内大的充电电源,从而实现用来实现空中回收后的无人机接触充电功能;
16.所述中空吊绳34和吊舱端充电线35共同组成升降绳3,既能满足悬吊绳自身特性结构需求,又能满足充电线束内部走线需求,锁紧机构喇叭形粗定位锥板38固定于锁紧机构柱形壳36底部,其小锥口直径略大于锁紧杆机构12的直径,以实现锁紧杆精确进入小锥口并最终实现精确锁紧定位,其大锥口直径远远大于锁紧杆机构12的直径,并可与锥形上盖13完美贴合,实现无人机回收过程粗定位以及回收后限位锁紧以及精确定位作用。
17.该锁紧机构喇叭形粗定位锥板38与无人机锁紧杆机构12实现滚动接触,使无人机锁紧杆机构12顺滑的进入喇叭形回收锁紧机构4、提高无人机粗定位对接的顺滑程度、降低无人机对接风险;该锁紧机构喇叭形粗定位锥板38还与无人机上设置有锥形上盖13高度吻
合,实现无人机锁紧过程中锥形定位,从而实现无人机准确定位锁紧,并防止无人机锁紧后发生晃动等。
18.该锁紧爪30用于和无人机锁紧杆机构12上的锁紧槽17相配合,当锁紧爪30插入锁紧槽17时实现无人机锁紧,当锁紧爪30拔出锁紧槽17时实现无人机解锁,锁紧及解锁过程方便快捷,锁紧后无人机固定牢固可靠。
19.所述喇叭形回收锁紧机构4的底部设置有与所述锁紧杆机构12的锁紧杆中心正极19和锁紧杆周圈负极20相对应的锁紧机构中心正极40和锁紧机构周圈负极41,并且,锁紧杆机构12的锁紧杆中心正极19、锁紧杆周圈负极20,和喇叭形回收锁紧机构4的锁紧机构中心正极40以及锁紧机构周圈负极41均采用弹性吸合式结构;所述喇叭形回收锁紧机构4的锁紧爪30和锁紧杆机构12的锁紧槽17均设置有接触斜面,当锁紧爪30和锁紧槽17接触斜面接触时,实现锁紧杆机构12向上预紧,从而实现锁紧杆中心正极19与锁紧机构中心正极40相吸合,锁紧杆周圈负极20和锁紧机构周圈负极41相吸合,最终实现无人机接触充电。
20.本发明的优点效果
21.1、无人机通过采用阿基米德螺旋盘将电机旋转运动转化为多个伸缩杆同步伸缩运动,又通过多连杆机构将多个伸缩杆同步伸缩运动转化为无人机多个折叠旋翼臂的同步折叠运动,实现无人机同步折叠,减少无人机空间占用;
22.2、无人机旋翼扇叶周围安装有扇叶保护装置,防止无人机回收过程中与吊舱发生碰撞造成的无人机和吊舱的损坏,提高无人机回收的安全性及可靠性;
23.3、无人机锁紧杆上安装有粗定位滚轮,喇叭形回收锁紧机构上安装有锁紧机构喇叭形粗定位锥板,可实现锁紧杆与锁紧机构喇叭形粗定位锥板滚动接触,使无人机锁紧杆顺滑的进入喇叭形回收锁紧机构,提高无人机粗定位对接的顺滑程度,提高无人机对接效率,降低无人机对接风险;
24.4、无人机上设置有锥形上盖,可与锁紧机构喇叭形粗定位锥板高度吻合,可实现无人机锁紧过程中锥形定位,从而实现无人机准确定位锁紧,并防止无人机锁紧后发生晃动等;
25.5、喇叭形回收锁紧机构上设置有多爪卡盘式锁紧爪,锁紧杆上设置有锁紧槽,当卡爪插入锁紧槽时实现无人机锁紧,当卡爪拔出锁紧槽时实现无人机解锁,锁紧及解锁过程方便快捷,锁紧后无人机固定牢固可靠;
26.6、无人机的锁紧杆上设置有锁紧杆中心正极和锁紧杆周圈负极,喇叭形回收锁紧机构上设置有锁紧机构中心正极和锁紧机构周圈负极,并且锁紧杆中心正极、锁紧杆周圈负极、锁紧机构中心正极以及锁紧机构周圈负极均采用弹性吸合式结构,此外,锁紧爪和锁紧槽均设置有接触斜面,当锁紧爪和锁紧槽接触斜面接触时,实现锁紧杆向上预紧,从而实现锁紧杆中心正极与锁紧机构中心正极相吸合,锁紧杆周圈负极和锁紧机构周圈负极相吸合,最终实现无人机接触充电;
27.7、无人机锁紧杆的支撑杆为中空结构,内部贯穿有无人机端充电线,变形电机为中空结构;吊舱端充电线贯穿于中空减速器、中空电机以及中空吊绳内部,中空减速器、中空电机以及中空吊绳为中空结构,无人机端充电线和吊舱端充电线实现充电线束无人机、吊舱及吊绳内部走线,既能满足无人机、吊舱及吊绳自身结构特性,又能满足充电线束内部走线需求。
附图说明
28.图1为无人机空中回收前状态图;
29.图2为无人机空中回收对接锁定图;
30.图3为无人机空中回收折叠变形图;
31.图4为无人机空中回收舱内吊挂充电图;
32.图5为无人机飞行示意图;
33.图6为无人机顶部及回收杆结构图;
34.图7为无人机旋翼臂折叠变形机构侧俯视图;
35.图8为无人机旋翼臂折叠变形机构侧俯视图;
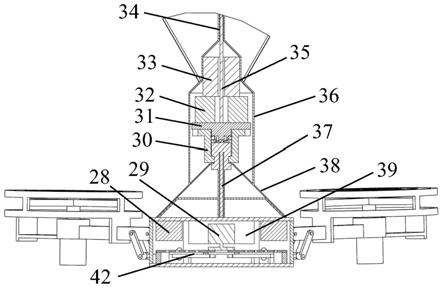
36.图9为无人机空中回收锁定状态剖面图;
37.图10为喇叭状回收锁紧机构示意图。
38.其中,1、吊舱;2、可空中回收折叠式旋翼无人机;3、升降绳;4、喇叭形回收锁紧机构;5、舱门;6、机体;7、折叠旋翼臂;8、扇叶驱动电机;9、扇叶保护装置;10、扇叶;11、上盖;12、锁紧杆机构;13、锥形上盖;14、摆臂;15、伸缩臂;16、下盖;17、锁紧槽;18、粗定位滚轮;19、锁紧杆中心正极;20、锁紧杆周圈负极;21、锁紧柱;22、支撑杆;23、传动销钉;24、螺旋盘;25、支撑盘;26、阿基米德螺旋槽;27、直线槽;28、控制器;29、变形电机;30、锁紧爪;31、锁紧爪固定架;32、中空减速器;33、中空电机;34、中空吊绳;35、吊舱端充电线;36、锁紧机构柱形壳;37、无人机端充电线;38、锁紧机构喇叭形粗定位锥板;39、无人机电池;40、锁紧机构中心正极;41、锁紧机构周圈负极;42、旋翼臂折叠变形机构。
具体实施方式
39.本发明设计原理
40.1、回收锁紧机构设计原理。本发明采用三者结合的方法,即滚动粗定位、锁紧、锥形盖限位三者结合的方法,实现了无人机空中回收的快捷、准确、牢固的定位效果。锁紧前,采用滚动粗定位方法提高了无人机粗定位对接时的顺滑程度和对接效率,为下一步的锁紧固定打下了基础;锁紧固定过程中,采用锥形盖限位的方法,进一步辅助锁紧固定过程中的准确对位,锁紧后,再次通过锥形盖限位的方法防止无人机锁紧后发生晃动;以上三者缺一不可,互相支持:没有锁紧前的顺滑入位,就不可能产生锁紧固定动作,没有锥形限位定位,即使顺滑入位并完成了锁紧,仍然会发生锁紧后的晃动,降低锁紧的效果;没有锁紧固定机构,即使有了粗定位定位和限位定位,但是仍然不能将无人机锁住,因此,粗定位机构依赖于限位定位机构,限位定位机构又依赖于锁紧定位机构,最终达到理想定位效果一定是三者组合以后的效果。
41.2、折叠式回收设计原理。设计原理是:将电机的旋转运动转换为收缩运动,再将收缩运动转换为折叠运动,单纯的收缩功能或单纯的折叠功能都不难实现,难点在于如何将二者巧妙的结合起来。本发明无人机通过采用阿基米德螺旋盘将电机旋转运动转化为多个伸缩杆同步伸缩运动,又通过多连杆机构将多个伸缩杆同步伸缩运动转化为无人机多个折叠旋翼臂的同步折叠运动,从而实现采用一个电机同步完成无人机收缩和折叠。
42.3、本发明的设计难点。难点在于把5个机构巧妙地结合起来:包括滚动粗定位机构、锁紧机构、锥形盖限位机构、收缩机构、折叠机构。虽然这5个机构单独的每个机构都是
现有的,但是如果只是把5个独立的机构拼凑一起则一定不会产生本发明的效果,因为本发明不是各个独立效果之和,而是组合后的效果。难点并不在于每个独立的技术,难点在于如何把5个方面有机地结合起来。
43.下面,结合附图对本发明做出进一步的解释:
44.一种可空中回收折叠式旋翼无人机,如图1
‑
图6所示,包括带有锥形上盖13的机体6、均匀布设在机体6周围且铰接于机体6的折叠旋翼臂机构7、8、9、10、布设于机体6顶部的锁紧杆机构12、布设于机体6内部的旋翼臂折叠变形机构42、以及电源及控制机构37、39、28;所述锁紧杆机构12用于实现无人机空中回收过程中的滚动粗定位、锁紧、限位以及充电等功能;所述旋翼臂折叠变形机构42用于实现无人机折叠变形。
45.所述折叠旋翼臂机构如图5所示,包括四个折叠旋翼臂7、四个扇叶驱动电机8、四个扇叶保护装置9、四个扇叶10;其中四个折叠旋翼臂7均布铰接于机体6上,四个扇叶驱动电机8分别安装于各折叠旋翼臂7的末端,四个扇叶10分别安装于各折叠旋翼臂7末端以及各扇叶驱动电机8的输出轴端,四个扇叶保护装置9分别罩于各扇叶10四周,并固定于各折叠旋翼臂7末端,实现无人机扇叶10的保护,防止飞行及回收过程扇叶10发生磕碰损坏造成故障及危险。
46.所述锥形上盖13如图5所示,其布设在机体6的上盖11上,机体6的上表面和下表面设有上盖11和下盖13,在上盖11上还固装设有锥形上盖13,锥形上盖13起到无人机锁紧回收后的定位及限位作用,以实现无人机精确定位及牢固锁定。
47.所述锁紧杆机构12如图5、图6所示,包括锁紧槽17、粗定位滚轮18、锁紧杆中心正极19、锁紧杆周圈负极20、锁紧柱21、支撑杆22;其中锁紧杆中心正极19和锁紧杆周圈负极20安装于锁紧柱21顶部,用来实现无人机接触充电功能;粗定位滚轮18均布于锁紧柱21顶部周圈,用来实现无人机粗定位以及滚动摩擦;锁紧柱21安装于支撑杆22的上端、支撑杆22安装于上盖11上,锁紧槽17开槽于锁紧柱21相应位置,用于锁紧锁紧杆机构12,从而锁紧可空中回收折叠式旋翼无人机2。
48.所述的电源及控制机构机构37、39、28如图5、图6、图9所示,包括无人机端充电线37、无人机电池39、以及控制器28;无人机端充电线37穿过中空结构的锁紧杆机构12内部,一端连接于锁紧杆中心正极19和锁紧杆周圈负极20上,另外一端连接无人机电池39,用来实现空中回收后的无人机接触充电功能;控制器28、变形电机29和无人机电池39固定于锥形上盖13的下表面相应位置,旋翼臂折叠变形机构42安装于下盖16相应位置,变形电机29的输出法兰固定于旋翼臂折叠变形机构42相应位置,从而驱动旋翼臂折叠变形机构42运动,实现无人机折叠旋翼臂7折叠变形,从而大大降低了无人机的体积,减少了回收占用空间,提高了空间利用率,降低了无人机自身摆动及转动惯量,提高了回收升降时的安全性。
49.所述旋翼臂折叠变形机构42如图5、图7、图8所示,包括摆臂14、伸缩臂15、传动销钉23、螺旋盘24、支撑盘25、阿基米德螺旋槽26、直线槽27、变形电机29;所述摆臂14一端铰接于所述折叠旋翼臂7上,一端铰接于伸缩臂15上;所述螺旋盘24通过多个传动销钉23安装于支撑盘25上,螺旋盘24上开有多条阿基米德螺旋槽26,支撑盘25上开有多条直线槽27,多个伸缩臂15通过传动销钉23安装于支撑盘25的多条直线槽27上,变形电机29安装于螺旋盘24上,当变形电机29转动时,带动螺旋盘24旋转,从而带动多个传动销钉23在阿基米德螺旋槽26和直线槽27内滑动,并带动多个伸缩臂15同步伸缩,从而带动摆臂14和折叠旋翼臂7同
步转动,从而实现无人机折叠变形,减少无人机空间占用。
50.所述的电源及控制机构37、39、28如图5、图7和图8所示,包括无人机端充电线37、无人机电池39、以及控制器28;无人机端充电线37穿过中空结构的锁紧杆机构12内部,一端连接于锁紧杆中心正极19和锁紧杆周圈负极20上,另外一端连接无人机电池39,用来实现空中回收后的无人机接触充电功能,控制器28、变形电机29和无人机电池39固定于上盖13的下表面相应位置,旋翼臂折叠变形机构42安装于下盖16相应位置,变形电机29的输出法兰固定于旋翼臂折叠变形机构42相应位置,从而驱动旋翼臂折叠变形机构42运动,实现无人机折叠旋翼臂7折叠变形,从而大大降低了无人机的体积,减少了回收占用空间,提高了空间利用率,降低了无人机自身摆动及转动惯量,提高了回收升降时的安全性。
51.一种喇叭形无人机回收锁紧机构如图2、图9、图10所示,其特点是:包括锁紧爪30、锁紧爪固定架31、中空减速器32、中空电机33、中空吊绳34、吊舱端充电线35、锁紧机构柱形壳36、锁紧机构喇叭形粗定位锥板38、锁紧机构中心正极40、锁紧机构周圈负极41;其中锁紧爪30、锁紧爪固定架31、中空减速器32和中空电机33依次串联安装组成锁紧装置,锁紧装置整体固定于锁紧机构柱形壳36上,用来实现无人机锁紧功能;
52.补充说明:
53.关于无人机回收锁紧机构的控制机构属于常规技术,不在此赘述,可参照常规控制方法控制。
54.所述中空吊绳34安装于锁紧机构柱形壳36顶部,用于悬吊回收锁紧机构;吊舱端充电线35穿过中空减速器32、中空电机33以及中空吊绳34连接于锁紧爪固定架31上的锁紧机构中心正极40和锁紧机构周圈负极41上,另一端连接于吊舱内大的充电电源,从而实现用来实现空中回收后的无人机接触充电功能;
55.中空吊绳34和吊舱端充电线35共同组成升降绳3,既能满足悬吊绳自身特性结构需求,又能满足充电线束内部走线需求,锁紧机构喇叭形粗定位锥板38固定于锁紧机构柱形壳36底部,其小锥口直径略大于锁紧杆机构12的直径,以实现锁紧杆精确进入小锥口并最终实现精确锁紧定位,其大锥口直径远远大于锁紧杆机构12的直径,并可与锥形上盖13完美贴合,实现无人机回收过程粗定位以及回收后限位锁紧以及精确定位作用。
56.如图5、图9所示,该锁紧机构喇叭形粗定位锥板38与无人机锁紧杆机构12实现滚动接触,使无人机锁紧杆机构12顺滑的进入喇叭形回收锁紧机构4、提高无人机粗定位对接的顺滑程度、降低无人机对接风险;该锁紧机构喇叭形粗定位锥板38还与无人机上设置有锥形上盖13高度吻合,实现无人机锁紧过程中锥形定位,从而实现无人机准确定位锁紧,并防止无人机锁紧后发生晃动等。
57.如图5、图6、图9所示,该锁紧爪30用于和无人机锁紧杆机构12上的锁紧槽17相配合,当锁紧爪30插入锁紧槽17时实现无人机锁紧,当锁紧爪30拔出锁紧槽17时实现无人机解锁,锁紧及解锁过程方便快捷,锁紧后无人机固定牢固可靠。
58.如图6、图10所示,所述喇叭形回收锁紧机构4的底部设置有与所述锁紧杆机构12的锁紧杆中心正极19和锁紧杆周圈负极20相对应的锁紧机构中心正极40和锁紧机构周圈负极41,并且,锁紧杆机构12的锁紧杆中心正极19、锁紧杆周圈负极20,和喇叭形回收锁紧机构4的锁紧机构中心正极40以及锁紧机构周圈负极41均采用弹性吸合式结构;所述喇叭形回收锁紧机构4的锁紧爪30和锁紧杆机构12的锁紧槽17均设置有接触斜面,当锁紧爪30
和锁紧槽17接触斜面接触时,实现锁紧杆机构12向上预紧,从而实现锁紧杆中心正极19与锁紧机构中心正极40相吸合,锁紧杆周圈负极20和锁紧机构周圈负极41相吸合,最终实现无人机接触充电。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。