1.本发明涉及用于对伺服马达的旋转信息、由减速器及马达构成的致动器的输出轴的旋转信息进行检测的光学式旋转编码器。
背景技术:
2.作为光学式旋转编码器,已知透射型及反射型的光学式旋转编码器。如专利文献1(图3)中记载的那样,关于透射型的光学式旋转编码器,在安装于测定对象的旋转轴的旋转盘的一侧配置有发光元件,在另一侧配置有受光元件。发光元件射出的检测光从形成于旋转盘的狭缝图案以及形成于固定狭缝板的狭缝图案通过而生成多个光信号。这些光信号由受光元件接收,在进行了光电变换之后向信号处理电路供给而形成相位相差90
°
的的a相及b相的2相信号等。关于专利文献2所记载的光学式旋转编码器,具备2组发光元件及受光元件,借助形成于旋转盘及固定狭缝板的2列狭缝图案而生成光信号。由此,不使狭缝图案实现微细化便能够提高检测精度。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2011
‑
172358号公报
6.专利文献2:日本特开2007
‑
147396号公报
技术实现要素:
7.为了提高光学式旋转编码器的检测精度、且实现其小型化、低成本化,期望能够利用1组发光元件及受光元件对多列狭缝图案进行检测。例如,在图3(a)~(c)所示的光学式旋转编码器100中,当将发光二极管(led)101作为光源时,从led101射出的检测光102的有效点形状为圆形。在旋转盘103形成有多列狭缝图案106(检测轨迹),在固定狭缝板105也形成有多列狭缝图案107。
8.在图3(c)中,白色的长方形表示构成旋转盘103的多列狭缝图案106的狭缝103a,灰色的菱形表示构成固定狭缝板105的狭缝图案107的狭缝105a,带斜线的长方形表示构成受光元件104的受光面图案108的受光面104a。来自led101的检测光102从旋转盘103的狭缝图案106以及固定狭缝板105的狭缝图案107通过并由受光元件104的各受光面104a接收。如图3(c)所示,来自led101的检测光102的有效点109需要设为包含由多个菱形的狭缝105a构成的固定狭缝板105的狭缝图案的大小。
9.例如,若使led101的有效点109为图3(c)中虚拟线所示的那样的小径的有效点7a,则固定狭缝板105的狭缝图案中的一对狭缝105a(1)、105a(2)在局部形成为从有效点7a露出的状态。其结果,借助一对狭缝105a(1)、105a(2)而获得的2相的光信号的受光量降低,无法获得s/n比较高的2相信号。需要选定具备较大的有效点109的大型led101,以使得构成固定狭缝板105的狭缝图案的各狭缝105a完全收敛于有效点的范围内。若能够减小所需的led101的有效点直径,则设计自由度增大,有利于成本的削减、装置的小型化。
10.本发明的目的在于提供一种光学式旋转编码器,其具备形成有适合配置于检测光的有效点的范围内的狭缝图案的固定狭缝板,有利于设计自由度的提高、成本的削减以及小型化。
11.另外,本发明的目的在于提供组装有上述新型的光学式旋转编码器的伺服马达、以及由减速器及马达构成的致动器。
12.为了解决上述课题,本发明的光学式旋转编码器的特征在于,具备:
13.旋转盘,其具备形成为同心状的多列检测轨迹;
14.发光元件,其对所述检测轨迹照射检测光;
15.固定狭缝板,其具备使从所述检测轨迹各自的所述检测光的照射区域获得的光信号通过的狭缝图案;以及
16.受光元件,其分别接收从所述狭缝图案通过的所述光信号,
17.所述检测轨迹分别由以恒定的角度间隔排列的狭缝或反射带构成,
18.所述固定狭缝板的所述狭缝图案由与所述检测轨迹的数量对应的数量的狭缝列构成,
19.所述狭缝列中包括多个第一狭缝列以及多个第二狭缝列,所述第一狭缝列、所述第二狭缝列排列在所述旋转盘的半径方向上,
20.所述第一狭缝列的狭缝排列方向上的长度比所述第二狭缝列的狭缝排列方向上的长度短,
21.所述狭缝图案形成为所述第一狭缝列分别位于作为狭缝列排列方向的所述半径方向的两侧,所述狭缝图案位于所述固定狭缝板的所述检测光的有效照射区域内。
22.例如,关于狭缝排列方向上的长度较短的所述第一狭缝列,2个第一狭缝以第一间隔排列在所述旋转盘的圆周方向上。与此相对,关于狭缝排列方向上的长度较长的所述第二狭缝列,狭缝宽度与所述第一狭缝列的所述第一狭缝相同的2个第二狭缝以大于所述第一间隔的第二间隔排列在所述圆周方向上。
23.从led等发光元件射出的检测光的有效点形状一般为圆形。若检测轨迹数增加,则固定狭缝板的狭缝图案的狭缝列增加,因此,其排列方向上的尺寸增大。在本发明中,长度较短的第一狭缝列配置于狭缝列排列方向的两侧。与较长的第二狭缝列配置于狭缝列排列方向的两侧的情况相比,能够使整个狭缝图案收敛于更小的有效点的范围内。因而,能够使用尺寸较小的led等发光元件,有利于光学式旋转编码器的小型化。
附图说明
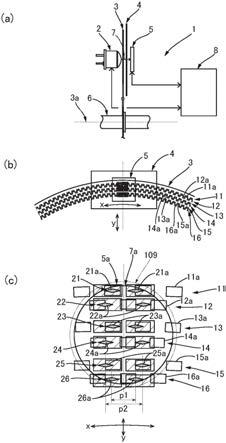
24.图1(a)是示出应用了本发明的透射型的光学式旋转编码器的一例的说明图,图1(b)是示出旋转盘的检测轨迹、固定狭缝板的狭缝图案以及受光元件的受光面图案的说明图,图1(c)是与检测光的有效点一并放大示出检测轨迹、狭缝图案以及受光面图案的说明图。
25.图2(a)是示出能够应用本发明的反射型的光学式旋转编码器的结构例的说明图,图2(b)是示出组装有本发明的光学式旋转编码器的伺服马达的说明图,图2(c)是示出组装有本发明的光学式旋转编码器的致动器的说明图。
26.图3(a)是示出透射型的光学式旋转编码器的一例的说明图,图3(b)是示出旋转盘
的检测轨迹、固定狭缝板的狭缝图案以及受光元件的受光面图案的说明图,图3(c)是与检测光的有效点一并放大示出检测轨迹、狭缝图案以及受光面图案的说明图。
具体实施方式
27.以下,参照附图对应用了本发明的光学式旋转编码器的实施方式进行说明。
28.图1(a)是示出本实施方式所涉及的透射型的光学式旋转编码器的概要结构的说明图。光学式旋转编码器1具备发光元件2、旋转盘3、固定狭缝板4以及受光元件5。在本例中,作为发光元件2而采用led。旋转盘3安装于测定对象的旋转轴6,且与旋转轴6一体旋转。发光元件2和受光元件5配置于固定的位置,这些部件隔着旋转盘3而从沿着旋转盘3的旋转中心线3a的方向对置。固定狭缝板4配置于受光元件5与旋转盘3之间。
29.图1(b)是示出旋转盘3的检测轨迹、固定狭缝板4的狭缝图案以及受光元件5的受光面图案的说明图,图1(c)是其局部放大图。从发光元件2射出的检测光7垂直地入射至旋转盘3,对形成于旋转盘3的多列检测轨迹进行照射。在本例中,6列检测轨迹11~16以旋转盘3的旋转中心为中心而形成为同心状。外周侧的2列检测轨迹11、12例如是以恒定的角度间隔形成有255个矩形的狭缝11a、12a的游标卡尺式(nonius)信号检测轨迹。它们内侧的2列检测轨迹13、14例如是以恒定的角度间隔形成有256个矩形的狭缝13a、14a的主信号检测轨迹。旋转中心侧的2列检测轨迹15、16例如是以恒定的角度间隔形成有240个相同形状(相同宽度及相同长度)的矩形的狭缝15a、16a的校正信号检测轨迹。狭缝11a~16a是形成于旋转盘3的光通过部或光透过部。
30.在固定狭缝板4以与检测轨迹11~16对应的方式而形成有由6列狭缝列21~26构成的狭缝图案。狭缝列21~26在旋转盘3的半径方向y(狭缝列排列方向)上排列。狭缝列21~26分别由在旋转盘3的圆周方向x(狭缝排列方向)上以恒定的间隔配置的一对狭缝21a、一对狭缝22a、一对狭缝23a、一对狭缝24a、一对狭缝25a以及一对狭缝26a构成。各狭缝21a~26a是相同形状(在本例中为菱形)的光通过部或光透过部。
31.对检测轨迹11~16照射的检测光7在旋转盘3的表面上形成圆形的有效点7a来作为有效照射区域。从位于有效点7a的范围内的各检测轨迹11~16的狭缝11a~16a通过的检测光7变为与各检测轨迹11~16分别对应的光信号而对固定狭缝板4进行照射。从固定狭缝板4的狭缝图案通过的各光信号由受光元件5的各受光面5a接收。
32.在图1(c)中,实线的圆表示有效点7a,白色的长方形表示形成于旋转盘3的6列检测轨迹11~16的狭缝11a~16a,灰色的菱形表示形成于固定狭缝板4的6列狭缝列21~26的各狭缝21a~26a,带斜线的长方形表示受光元件5的受光面5a。
33.在固定狭缝板4上,关于游标卡尺式信号产生用的狭缝列21、22中的一个狭缝列21,狭缝21a(第一狭缝)以狭小的第一角度间隔p1在圆周方向x(狭缝排列方向)上排列。伴随着旋转盘3的旋转,由借助一个狭缝21a而获得的光信号生成a相信号,并由借助另一个狭缝21a而获得的光信号生成b相信号。在狭缝列22中,狭缝22a(第二狭缝)以宽广的第二角度间隔p2而排列,另外,相对于狭缝21a在圆周方向x(狭缝排列方向)上偏移规定角度。由此,由借助一个狭缝22a而获得的光信号生成a相的反相信号,由借助另一个狭缝22a而获得的光信号生成b相的反相信号。
34.对于主信号产生用的狭缝列23、24也一样。在狭缝列23中,狭缝23a(第一狭缝)以
第一角度间隔p1而排列,由此生成a相及b相的2相信号。在狭缝列24中,狭缝24a(第二狭缝)以第二角度间隔p2而排列,由此生成a相的反相信号以及b相的反相信号。
35.与此相对,对于校正信号产生用的狭缝列25、26,在位于半径方向y的外侧的狭缝列25中,狭缝25a(第二狭缝)在圆周方向x上以宽广的第二角度间隔p2而排列。在另一个狭缝列26中,狭缝26a(第一狭缝)在圆周方向x上以狭小的第一角度间隔p1而排列。如后所述,通过在受光元件5侧对配线进行变更等而由从狭缝列25的狭缝25a获得的光信号生成a相及b相的2相信号,并由从狭缝列26的狭缝26a获得的光信号而获得a相的反相信号以及b相的反相信号。
36.受光元件5的受光面图案与各狭缝21a~26a对应地包含12个受光面5a。在各受光面5a接收的光信号变换为电信号而向信号处理单元8供给。在信号处理单元8中,通过公知的信号处理而生成由2组2相信号形成的主信号、由2组2相信号形成的游标卡尺式信号以及由2组2相信号形成的校正信号。
37.在本例的光学式旋转编码器1的固定狭缝板4的狭缝图案中,关于位于半径方向y(狭缝列排列方向)的外端及内端的狭缝列21、26,一对狭缝21a以及一对狭缝26a分别以狭小的第一角度间隔p1而排列。由此,上述狭缝21、26a全部都收敛于检测光7的圆形的有效点7a的范围内。在图3(c)所示的固定狭缝板105的狭缝图案的情况下,需要利用直径大于有效点7a的直径的有效点109的led101来使狭缝图案收敛于有效点的范围内。在本例中,可以利用更小的有效点直径的发光元件2。
38.在本例中,关于固定狭缝板4,狭缝列25、26的狭缝图案与其他狭缝列21、21以及狭缝列23、24的情况相反。设计成由狭小的第一角度间隔p1的狭缝生成a相、b相的2相信号,且由宽广的第二角度间隔p2的狭缝生成2相信号的反相信号。在该情况下,只要将配线变更为使得来自接收借助以宽广的第二角度间隔p2配置的狭缝25a而获得的光信号的受光面5a的输出、和来自接收借助以狭小的第一角度间隔p1配置的狭缝26a而获得的光信号的受光面5a的输出彼此替换地向信号处理单元8供给即可。或者,若是可编程型的受光元件,则可以不对信号配线进行变更而仅对内部寄存器(信号的分配)进行变更。因而,不对旋转盘3的检测轨迹11~16、受光元件5的受光面图案等进行变更而对固定狭缝板4的狭缝图案进行变更,容易使得各狭缝21a~26a收敛于有效点7a的范围内。
39.接下来,本发明同样还能够应用于反射型的光学式旋转编码器。图2(a)中示出了反射型的光学式旋转编码器的概要结构。光学式旋转编码器51的基本结构与一般的反射型的光学式旋转编码器相同,具备发光元件52、旋转盘53、固定罩54以及受光元件55。旋转盘53安装于测定对象的旋转轴(未图示),且与旋转轴一体旋转。发光元件52和受光元件55配置于固定的位置,这些部件相对于旋转盘53而配置于同一侧。从发光元件52射出的检测光57被由在旋转盘53的表面以同心状排列的反射带构成的检测轨迹53a反射,借助形成于固定罩54的狭缝图案54a而由受光元件55的受光面55a接收。形成于固定罩54的狭缝图案形成为使得各狭缝收敛于由检测轨迹53a反射的检测光的有效点的范围内。
40.图2(b)是示出应用了本发明的伺服马达的说明图。伺服马达80具备:马达主体部81;编码器83,其用于对马达输出轴82的旋转位置、旋转速度等旋转信息进行检测;以及马达控制单元84。对于编码器83而采用图1或图2(a)所示的光学式旋转编码器1、51。
41.图2(c)是示出应用了本发明的致动器的一例的说明图。致动器90具备:马达91;减
速器92,其使得马达91输出的旋转减速输出;编码器94,其对减速器92的输出轴93的旋转位置、旋转速度等旋转信息进行检测;以及控制单元95。对于编码器94,采用图1或图2(a)所示的光学式旋转编码器1、51。
42.(其他实施方式)
43.上述光学式旋转编码器是通过游标卡尺方式而形成狭缝图案的情况。本发明还可以同样地应用于具备狭缝数不同的多个狭缝列的递增方式的光学式旋转编码器、或者多个狭缝列根据m系列的排列图案而形成的光学式旋转编码器。
44.在这种情况下,关于在光学式旋转编码器的固定狭缝板形成的多个狭缝列,有时狭缝宽度相同或狭缝宽度不同,有时狭缝间隔相同或狭缝间隔不同,或者有时狭缝数相同或狭缝数不同。无论在何种情况下,狭缝排列方向上的长度相对较大的狭缝列都在狭缝列排列方向上配置于其中心侧,相对较小的狭缝列配置于狭缝列排列方向的两侧。由此,容易使得整个狭缝列收敛于更小的有效点直径的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

