1.本发明涉及一种系统,其包括具有致动环节的能够以压缩空气进行加载的气动的致动器。所述系统此外包括压缩空气提供装置,其构造成用于通过气动的致动器的压缩空气加载来执行致动环节的位置调节,以便将致动环节定位到理论位置中。
背景技术:
2.压缩空气提供装置例如包括阀平台(ventilinsel)。气动的致动器例如是气动的驱动气缸。
3.所述系统适宜地应用在工业自动化中,例如以便通过致动环节对驱动对象,如工具、工件和/或机器部件进行定位。
4.气动的致动器包括一个或多个压力空腔,其在位置调节的范围内通过以压缩空气进行加载被置于压力之下,以便由此促使致动环节的定位。借助于压缩空气加载的位置调节装置还被称为伺服气动装置。
5.适宜地,压缩空气提供装置能够应用于多种不同的应用中和/或与不同的气动的致动器一起应用。为了实现在压缩空气提供装置与气动的致动器之间的良好的相互作用,有优点的是,压缩空气提供装置具有描述在定位致动环节时出现的摩擦的摩擦信息和/或描述在定位致动环节时待被置于运动中的质量的质量信息。例如压缩空气提供装置4在致动环节的位置调节时考虑摩擦信息和/或质量信息。
6.示范性地,摩擦信息和/或质量信息能够在使用地点处(例如在系统投入运行时)由用户输入到压缩空气提供装置中,例如输入到应用程序中,借助所述应用程序提供位置调节。
技术实现要素:
7.本发明的任务在于,如此改进开头所提及的系统,使得其对于用户来说是更容易得到在压缩空气提供装置与气动的致动器之间的良好的相互作用。
8.所述任务通过根据权利要求1的系统来解决。压缩空气提供装置构造成用于实施协助程序并且在协助程序的范围内通过气动的致动器的压缩空气加载将致动环节置于尤其正弦形的振荡运动中,在所述振荡运动中致动环节交替地沿第一运动方向和沿第二运动方向进行运动,在振荡运动期间探测压缩空气的压力值和致动环节的位置值并且基于所探测的压力值和所探测的位置值测定和/或校验摩擦信息和/或质量信息。
9.对于用户来说可能难以自己来测定摩擦信息和/或质量信息。协助程序适宜地提供如下功能,即摩擦信息和/或质量信息自动地由压缩空气提供机构进行测定,也即基于致动环节的振荡运动进行测定。压缩空气提供装置尤其构造成用于借助于协助程序全自动地测定摩擦信息和/或质量信息。
10.尤其在如下情况下,在所述情况下用户手动地输入摩擦信息和/或质量信息,能够发生的是,(尤其由于故障或输入错误)所输入的摩擦信息和/或质量信息是不正确的,也就
是说,尤其不与系统相匹配。适宜地,协助程序提供如下功能,即校验(尤其由用户输入的)摩擦信息和/或质量信息。
11.也就是说,协助程序用于确保存在有正确的摩擦信息和/或正确的质量信息。通过提供正确的摩擦信息和/或正确的质量信息能够得到在压缩空气提供装置与气动的致动器之间的良好的相互作用。例如在考虑摩擦信息和/或质量信息的情况下能够得到致动环节的准确的和/或快速的位置调节。
12.另外的有利的设计方案是从属权利要求的主题。
13.本发明此外涉及一种用于运行前面所描述的系统的方法。所述方法包括如下步骤:实施协助程序。
14.所述方法适宜地相应于所述系统的改进方案进行设计。
附图说明
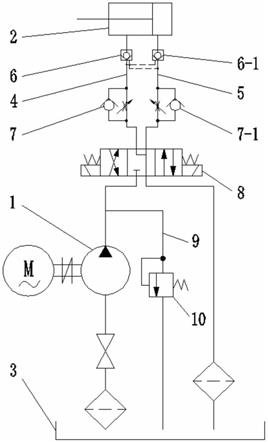
15.随后,参考图阐释示范性的细节和示例性的实施方式。在此:图1示出具有压缩空气提供装置、软管组件和气动的致动器的系统的示意性的视图,图2示出阀机构的示意性的视图,图3示出振荡运动的线图,图4示出未优化的摩擦曲线的线图,以及图5示出优化的摩擦曲线的线图。
具体实施方式
16.图1示出系统100,其包括能够以压缩空气进行加载的气动的致动器2和压缩空气提供装置4。示范性地,系统100此外包括软管组件28,所述软管组件将压缩空气提供装置4与气动的致动器2连接。
17.气动的致动器2具有致动环节3。压缩空气提供装置4构造成用于执行致动环节3的位置调节,以便将致动环节3定位到理论位置中。在位置调节的范围内,压缩空气提供装置4通过软管组件28将压缩空气供应给致动器2,以便将致动环节3置于理论位置中。
18.适宜地,系统100用在工业自动化中,例如用于通过致动环节3对驱动对象、如工具、工件和/或机器部件进行定位。
19.压缩空气提供装置4包括阀组件14,为了致动器2的位置调节通过所述阀组件提供压缩空气。示范性地,阀组件14实施为阀平台。备选于此地,阀组件14还能够实施为单个阀或实施为其它的阀机构。
20.在阀组件14处存在有两个压力出口23、24用于提供压缩空气。这两个压力出口23、24中的每个与气动的致动器2的相应的压力空腔8、9气动地连接。阀组件14能够对这两个压力出口23、24彼此独立地进行换气和排气。
21.在备选的设计方案中,致动器2具有仅仅一个唯一的压力空腔。在该备选的设计方案中,压力空腔与压力出口连接。
22.阀组件14具有带有压力传感器的压力传感器组件29(在图2中示出),借助所述压力传感器能够测量在压力出口23、24处的压力和/或在排气联接部26和/或换气联接部27中
的压力。所述压力传感器适宜地布置在阀组件14处,尤其在阀平台处。
23.示范性地,阀组件14包括多个模块,例如阀模块17和/或i/o模块18。阀组件14此外包括控制单元19,其优选地同样实施为模块。阀组件14适宜地具有承载体20、尤其承载板,在其上布置有控制单元19、阀模块17和/或i/o模块18。
24.阀组件14示范性地实施为成排模块组件并且尤其还能够被称为阀平台。前面提及的模块尤其涉及成排模块,所述成排模块优选地盘形地进行实施。阀模块17尤其实施为阀盘。适宜地,成排模块尤其沿着阀组件14的纵向轴线排列在彼此处。
25.示范性地,压缩空气提供装置4此外包括上一级的控制部15和/或可选地包括云服务器16和/或用户设备49。
26.阀组件14适宜地与上一级的控制部15和/或云服务器16通讯地连接。优选地,阀组件14与上一级的控制部15通过总线25、尤其本体总线、例如现场总线进行连接和/或可选地与云服务器16通过广域网22、例如因特网进行连接。
27.阀组件14通讯地与致动器2的位置传感器机构10连接,尤其通过i/o模块18进行连接。示范性地,阀组件14通过一个或多个通讯线路91、92通讯地与位置传感器机构10连接。适宜地,由位置传感器机构10探测的位置值被提供给控制单元19、上一级的控制部15和/或云服务器16。适宜地,此外压力传感器43、44、45、46的压力值同样被提供给控制单元19、上一级的控制部15和/或云服务器16。
28.示范性地,气动的致动器2构造为驱动器,尤其构造为驱动气缸。气动的致动器2示范性地包括致动器体7、致动环节3和两个压力空腔8、9。适宜地,这两个压力空腔8、9能够彼此分离地以压缩空气进行加载。气动的致动器2尤其构造为双作用的致动器。备选于此地,气动的致动器2还能够具有仅仅一个压力空腔并且相应于此地构造为单作用的致动器。
29.致动器体7优选地实施为气缸并且具有内部容积。致动环节3包括例如活塞5和/或活塞杆6。活塞5布置在致动器体7中并且将致动器体7的内部容积划分成两个压力空腔8、9。
30.气动的致动器2适宜地包括位置传感器机构10。位置传感器机构10尤其用于探测致动环节3的位置。位置传感器机构10提供描绘致动环节3的位置的位置值。位置传感器机构10优选地实施为模拟位置传输器。位置传感器机构10示范性地在外部布置在致动器体7处。位置传感器机构10包括例如两个位置传感器单元11、12,其分布地沿着致动环节3的运动路径进行布置。示范性地,位置传感器单元11、12一起覆盖致动环节3的整个运动路径。
31.每个位置传感器单元11、12能够包括例如一个或多个(在图中未示出的)传感器元件,尤其磁性传感器元件、例如霍尔传感器元件。适宜地,在致动环节3处布置有磁体,其磁场能够借助磁性传感器元件进行检测。
32.适宜地,位置传感器机构10构造成用于在致动环节3的整个运动路径上探测致动环节3的位置。
33.适宜地,在气动的致动器2处不存在压力传感器,尤其不存在用于测量在压力空腔8、9中的一个中的压力的压力传感器。
34.适宜地,系统100包括软管组件28,通过所述软管组件将压缩空气提供装置4、尤其阀组件14与气动的致动器2气动地连接。第一软管51将第一压力出口23与第一压力空腔8气动地连接并且第二软管52将第二压力出口24与第二压力空腔9气动地连接。在备选的设计方案中,其中,气动的致动器2具有仅仅一个压力空腔,软管组件28适宜地包括仅仅一个软
管。
35.上一级的控制部15示范性地构造为能够存储编程的控制部、sps,并且与阀组件14、尤其与控制单元19通讯地连接。适宜地,上一级的控制部15此外与云服务器16连接,尤其通过广域网22、优选地通过因特网进行连接。上一级的控制部15适宜地构造成用于提供理论值信号,所述理论值信号预设理论位置,致动环节3在位置调节的范围内被调节到所述理论位置上。
36.用户设备49示范性地涉及可移动设备,例如智能电话、平板电脑和/或笔记本电脑。此外,用户设备49能够涉及台式电脑、例如pc。用户设备49适宜地通讯地与控制单元19、云服务器16和/或上一级的控制部15连接,尤其通过广域网22、例如因特网进行连接。用户设备49尤其构造成用于摩擦信息和/或质量信息的用户输入。适宜地,通过用户设备49能够采用用户界面,其例如在云服务器16、控制部15和/或控制单元19上被提供。用户界面适宜地涉及网络界面。用户界面尤其用于通过用户输入摩擦信息和/或质量信息。此外,用户界面优选地用于选出、激活应用程序和/或将其加载到控制单元19上,所述应用程序提供随后还进行阐释的位置调节器和/或协助程序。此外,用户设备49适宜地构造成用于操作和/或显示协助程序。
37.适宜地,云服务器16远离阀组件14和/或气动的致动器2进行布置,尤其布置在其它的地理学上的地点处。优选地,云服务器16构造成用于提供应用程序,借助所述应用程序提供位置调节和/或协助程序。应用程序能够由云服务器16加载到上一级的控制部15和/或控制单元19上,适宜地反应于借助用户设备49实现的用户输入。
38.图2示出示例性的阀机构21,借助所述阀机构能够提供用于压力空腔8、9的压力。阀机构21是压缩空气提供装置4、尤其阀组件14、优选阀模块17的一部分。
39.阀机构21具有两个压力出口23、24,借助其能够提供两个分离的压缩空气压力和/或两个分离的压缩空气质量流。阀机构21此外具有与排气线路连接的排气联接部26和与换气线路连接的换气联接部27。适宜地,在换气联接部27处邻近供给压力和/或在排气联接部26处邻近大气压力。
40.阀机构21对于每个压力出口23、24包括一个或多个阀环节48,通过其能够调整相应的出口开口的大小,所述出口开口在相应的压力出口23、24处供应或引出压缩空气时被穿过。
41.在图2中,阀机构21示范性地实施为由四个2/2换向阀31、32、33、34构成的全桥。第一2/2换向阀31接通到换气联接部27与第一压力出口23之间,第二2/2换向阀32接通到第一压力出口23与排气联接部26之间,第三2/2换向阀接通到排气联接部26与第二压力出口24之间并且第四2/2换向阀接通到第二压力出口24与换气联接部27之间。
42.第一压力出口23能够可选地通过第一2/2换向阀与排气线路连接或通过第二2/2换向阀与换气线路连接并且第二压力出口24能够可选地通过第三2/2换向阀与排气线路连接或通过第四2/2换向阀与换气线路连接。
43.每个2/2换向阀31、32、33、34示范性地构造为比例阀;也就是说,每个2/2换向阀31、32、33、34具有阀环节48,其能够被置于敞开的位置、关闭的位置和任意的在敞开的与关闭的位置之间的中间位置中。优选地,2/2换向阀31、32、33、34涉及预控制的阀,其分别具有两个预控制阀41、42,通过所述预控制阀能够操纵阀环节。预控制阀41、42示范性地构造为
压电阀。通过相应的阀环节48的位置适宜地能够调节前面提到的出口开口。
44.示范性地,第一和第二2/2换向阀31、32形成第一半桥并且第三和第四2/2换向阀33、34形成第二半桥。优选地,能够通过第一半桥调整第一压力出口23的出口开口并且能够通过第二半桥调整第二压力出口24的出口开口。
45.阀组件14适宜地包括具有一个或多个压力传感器的压力传感器组件29,以便探测阀组件14、尤其阀机构21的压力。
46.示范性地,压力传感器组件29包括第一压力出口压力传感器45用于探测在第一压力出口23处提供的压力和/或第二压力出口压力传感器46用于探测在第二压力出口24处提供的压力。适宜地,压力传感器组件29此外包括供气压力传感器44用于探测在换气联接部27处提供的压力和/或排气压力传感器43用于探测在排气联接部26处提供的压力。
47.适宜地,阀组件14、尤其阀机构21包括行程传感器47用于探测阀环节48的位置。压缩空气提供装置4尤其构造成用于借助于行程传感器47确定压力出口23、24的出口开口的大小。
48.在下面应该更详细地探讨由压缩空气提供装置4执行的位置调节:压缩空气提供装置4适宜地构造成用于在致动环节3的整个运动路径上执行位置调节。优选地,压缩空气提供装置4构造成用于借助于位置调节将致动环节3定位到沿着运动路径的任意的位置处。适宜地,致动环节3能够通过位置调节定位到每个沿着运动路径的任意的位置处。
49.优选地,压缩空气提供装置包括位置调节器,借助其提供致动环节3的位置调节。位置调节器适宜地实施为程序,尤其实施为应用程序,所述程序尤其实施在阀组件14上,优选地实施在控制单元19上。位置调节器50尤其实施在控制单元19的微控制器上。备选地或附加于此地,位置调节器50还能够实施在云服务器16和/或上一级的控制部15上。
50.位置调节器适宜地构造成用于基于理论值信号提供调校参量信号。理论值信号例如由控制单元19、控制部15和/或云服务器16提供。理论值信号预设理论位置。阀组件14构造成用于基于调校参量信号操控阀机构21、尤其2/2换向阀31、32、33、34、尤其其预控制阀41、42。示范性地,通过调校参量信号预设一个或多个传导值(leitwerte),根据其调整阀环节48的位置并且由此调整压力出口23、24的出口开口。
51.位置调节器尤其构造成用于取决于理论值信号和/或测量参量信号提供调校参量信号。
52.测量参量信号适宜地包括位置传感器机构10、压力传感器组件29、尤其压力传感器43、44、45、46和/或行程传感器47的测量值。也就是说,测量参量信号尤其包括所测量的致动环节3的位置、所测量的在排气联接部26处的压力、所测量的在换气联接部27处的压力、所测量的在压力出口23处的压力、所测量的在压力出口24处的压力和/或所测量的阀环节48的位置。适宜地,所测量的压力能够在测量参量信号中作为压力差进行提供。此外,所测量的位置在测量参量信号中能够作为传导值进行提供。
53.压缩空气提供装置4、尤其位置调节器构造成用于在致动环节3的位置调节时考虑摩擦信息和/或质量信息。
54.摩擦信息描述在定位致动环节3时出现的摩擦、尤其摩擦系数和/或摩擦力。适宜地,摩擦信息包括描述所述摩擦的摩擦参数。所述摩擦包括例如在致动环节3与致动器体7
之间、尤其在活塞5与致动器体7之间的摩擦。备选地或附加于此地,摩擦适宜地包括在由致动环节驱动的驱动对象与引导部之间的摩擦,在所述引导部处支承有所述驱动对象。
55.质量信息描述在定位致动环节3时待被置于运动中的质量。适宜地,质量信息包括描述所述质量的质量参数。所述质量包括例如致动环节3的质量。备选地或附加于此地,所述质量适宜地包括由致动环节3驱动的驱动对象的质量。
56.适宜地,压缩空气提供装置4、尤其位置调节器构造成用于基于摩擦信息和/或质量信息计算一个或多个用于位置调节的调节器参数、例如调节器增益(reglerverst
ä
rkungen)并且在位置调节时应用所述调节器参数。优选地,压缩空气提供装置4、尤其位置调节器构造成用于基于摩擦信息和/或质量信息执行调节器设计,以便计算用于位置调节的调节器参数、尤其调节器增益。适宜地,压缩空气提供装置4构造成用于基于摩擦信息和/或质量信息执行位置调节的自动参数化。
57.位置调节能够借助于质量信息和/或摩擦信息与一定的应用和/或与气动的致动器2相匹配。
58.适宜地,系统100具有用户接口用于手动地输入摩擦信息和/或质量信息。适宜地,所述输入直接在系统100的使用地点处进行,示范性地在系统100投入运行时进行。适宜地,位置调节器和/或协助程序在应用程序中被提供并且摩擦信息和/或质量信息的输入借助于应用程序或在应用程序中进行。示范性地,之前提及的用户设备49用作用户接口。
59.质量信息和/或摩擦信息尤其是能够由用户、例如通过用户设备49输入的参数。
60.在下面应该更详细地探讨协助程序。
61.压缩空气提供装置4适宜地构造成用于自动地、例如在投入运行模式中触发协助程序。备选地或附加于此地,系统100的用户接口、例如用户设备49包括用于手动地(也就是说,通过明确的用户输入选择性地促使)触发协助程序的功能。
62.适宜地,协助程序实施在控制单元19、控制部15、外部的云服务器16和/或用户设备49上,尤其实施为应用程序。
63.压缩空气提供装置4构造成用于在协助程序的范围内以压缩空气加载气动的致动器2,以便将致动环节3置于振荡运动60中,在所述振荡运动中,致动环节3交替地沿第一运动方向61和沿第二运动方向62进行运动。压缩空气提供装置4构造成用于在振荡运动60期间探测压缩空气的压力值和致动环节3的位置值,并且基于所探测的压力值和所探测的位置值测定和/或校验摩擦信息和/或质量信息。
64.图3示出示范性的振荡运动60的线图,致动环节3在协助程序期间被置于所述振荡运动中。在图3的线图中,致动环节3的位置x关于时间t进行绘制。
65.在振荡运动60的情况下,致动环节3沿着运动路径进行运动。振荡运动60尤其是正弦形的。振荡运动60具有多个周期63。
66.压缩空气提供装置4优选地构造成用于在振荡运动60期间改变致动环节3的速度,从而振荡运动60的多个周期63在其速度走向、尤其其最大速度方面与彼此不同,并且越过多个周期63探测压力值和位置值。压缩空气提供装置4为了测定和/或校验摩擦信息和/或质量信息尤其应用越过多个在其速度走向、尤其其最大速度方面与彼此不同的周期63探测到的压力值和位置值。
67.如在图3中示出的那样,振荡运动60的多个周期63在其速度走向方面与彼此不同。
多个周期63尤其在其最大速度方面与彼此不同。
68.示范性地,振荡运动60包括多个速度阶段67a、67b、67c,其分别包括多个周期63。备选地,一个、多个或全部的速度阶段67a、67b、67c还能够仅仅包括相应一个周期63。适宜地,速度阶段的相应的周期63分别具有相同的速度走向、尤其相同的最大速度。速度阶段67a、67b、67c适宜地在其速度走向、尤其其最大速度方面与彼此不同。在图3中示出三个不同的速度阶段67a、67b、67c。优选地,振荡运动60包括至少三个、尤其至少六个不同的速度阶段。
69.不同的速度阶段或周期63能够尤其通过一次或多次频率扫描来产生。
70.压缩空气提供装置4优选地构造成用于执行振荡运动60的至少一次频率扫描并且在频率扫描期间探测压力值和位置值。示范性地,具有不同的速度走向的不同的速度阶段和/或周期通过执行频率扫描,也就是说通过改变振荡运动60的频率来获得。
71.示范性地,压缩空气提供装置4构造成用于执行振荡运动60的至少一次第一频率扫描64和振荡运动的第二频率扫描65并且在这两次频率扫描64、65期间探测压力值和位置值。第一频率扫描64示范性地是具有上升的频率的频率扫描并且第二频率扫描65示范性地是具有下降的频率的频率扫描。
72.振荡运动60的速度阶段67a、67b、67c示范性地在其频率方面与彼此不同。第二速度阶段67b的频率大于第一速度阶段67a的频率并且第三速度阶段67c的频率大于第二速度阶段67b的频率。在每次频率扫描64、65中,多个速度阶段67a、67b、67c以不同的频率来进行。
73.压缩空气提供装置4构造成用于在振荡运动60期间、尤其在每次频率扫描64、65期间探测压缩空气的压力值和致动环节3的位置值。所探测的压力值适宜地包括借助压力传感器组件29探测的在压力出口23、24处的压力。基于在频率扫描64、65期间探测的压力值和位置值计算摩擦信息和/或质量信息。
74.如随后详细地阐释的那样,压缩空气提供装置4适宜地构造成用于基于压力值和位置值计算作用于致动环节3的摩擦力。压缩空气提供装置4尤其构造成用于计算作用于致动环节3的摩擦力的摩擦力曲线66(在图4和5中示出)。
75.压缩空气提供装置4适宜地构造成用于基于摩擦力曲线66计算摩擦信息和/或质量信息,如随后还详细地阐释的那样。首先应该更详细地探讨摩擦力曲线66的计算。
76.示范性地,压缩空气提供装置4构造成用于将摩擦力曲线66的摩擦力计算为在沿第一运动方向61作用于致动环节3的第一气动的力、沿第二运动方向62作用于致动环节3的第二气动的力、由致动环节3的加速引起的惯性力和/或作用于致动环节3的重力之间的差。压缩空气提供装置4尤其构造成用于基于所探测的压力值计算第一气动的力和/或第二气动的力。
77.例如压缩空气提供装置4构造成用于基于如下运动方程来计算摩擦力曲线66:f
r
为摩擦力。
78.f
ad
为沿第一运动方向61起作用的第一气动的力,所述力通过第一压力空腔8的压缩空气加载来提供。例如f
ad
计算为第一压力空腔8的压力p
ad
和致动环节3的第一作用面a
ad
的乘积,压力p
ad
作用于所述第一作用面。也就是说,f
ad
作为得出。压力p
ad
优
选地基于借助压力传感器组件29探测的第一压力出口23的压力值来计算。根据备选的设计方案(其中,在致动器2处存在有压力传感器),压力p
ad
还能够作为压力值直接在致动器2处进行测量。
79.f
ld
为沿第二运动方向62起作用的第二气动的力,其通过第二压力空腔9的压缩空气加载和/或通过作用于致动环节3、尤其活塞杆6的周围环境压力来提供。例如f
ld
包括第二压力空腔9的压力p
ld
和致动环节3的第二作用面a
ld
的乘积,压力p
ld
作用于所述第二作用面。示范性地,f
ld
此外包括周围环境压力p
amb
、尤其大气压力和致动环节3的第三作用面的乘积,周围环境压力p
amb
作用于所述第三作用面。示范性地,第三作用面作为第一作用面a
ad
与第二作用面a
ld
的差得出。也就是说,f
ld
作为得出。压力p
ld
优选地基于借助压力传感器组件29探测的第二压力出口24的压力值来计算。根据备选的设计方案(其中,在致动器2处存在有压力传感器),压力p
ld
还能够作为压力值直接在致动器2处进行测量。
80.m为在定位致动环节3时待被置于运动中的质量;m尤其呈现质量信息、例如质量参数。m例如为致动环节3的质量加上待借助致动环节3驱动的驱动对象的质量(如果存在的话)。
81.为致动环节的加速度并且例如通过对尤其借助位置传感器机构10探测的致动环节3的位置值进行二次微分来获得。
82.g为重力加速度。
83.α为致动环节3的装入位置。尤其α为在致动环节3的运动路径与(垂直于重力加速度取向的)水平面之间的角度。
84.如前面所阐释的那样,压力空腔8、9的压力p
ad
和p
ld
示范性地基于借助压力传感器组件29探测的压力出口23、24的压力值来计算。借助压力传感器组件29探测的压力值还能够被称为测量压力并且基于测量压力计算出的压力p
ad
和p
ld
还能够被称为计算压力。计算压力尤其是估算出的压力。
85.也就是说,压缩空气提供装置4优选地构造成用于借助压力传感器组件29测量压缩空气提供装置4的测量压力、提供作为压力值的测量压力并且基于测量压力计算出计算压力,所述计算压力描绘在气动的致动器2的压力空腔8、9中存在的压力。压缩空气提供装置4此外构造成用于基于计算压力测定和/或校验摩擦信息和/或质量信息。
86.优选地,压缩空气提供装置4构造成,为了计算出计算压力应用软管组件28的软管模块。软管模块描绘软管对压力的影响。软管模块描述在压力空腔8、9中的相应的压力与在压力出口23、24处的相应的压力的关系。优选地,基于压力值和位置值计算出计算压力。
87.在下面,应该参考图4和5更详细地探讨如何能够基于摩擦力曲线66测定摩擦信息和/或质量信息。
88.在图4和5中示出的摩擦力曲线66示范性地是参数曲线。摩擦力曲线66的点相应地通过取决于时间的摩擦力f
r
(t)和致动环节3的取决于时间的速度v(t)进行界定。摩擦力曲线的点作为时间t的函数来进行。在y轴上绘制取决于时间的摩擦力f
r
并且在x轴上绘制在振荡运动60时致动环节3的取决于时间的速度v。速度v还应该被称为振荡速度v。取决于时间的速度v例如通过对致动环节3的所探测的位置求微分来计算。
89.在图4中示出的摩擦力曲线66还应该被称为未优化的摩擦力曲线66a。如随后阐释的那样,未优化的摩擦力曲线66a基于对于质量信息、尤其对于质量参数m的错误的假设。在图5中示出的摩擦力曲线66还应该被称为优化的摩擦力曲线66b。如随后阐释的那样,优化的摩擦力曲线66b基于对于质量信息、尤其对于质量参数m的正确的假设。也就是说,摩擦力曲线66a、66b通过相应选择的质量参数m而不同,以所述质量参数计算出了相应的摩擦力fr。
90.如前面提到的那样,摩擦力曲线66借助在振荡运动60期间探测的压力值来计算。就此而言要提到的是,出于更好的可呈现性在图3中示出与在图4和5中示出的摩擦力曲线66所基于的振荡运动不同的振荡运动60。因此,例如图3的振荡运动60具有比图4的摩擦力曲线66少的速度阶段。
91.未优化的摩擦力曲线66a具有多个速度阶段,其相应于所基于的振荡运动的速度阶段。示范性地,摩擦力曲线66a具有速度阶段67a、67b、67c、67d、67e和67f。速度阶段中的每个延伸经过振荡运动的一个或多个周期。未优化的摩擦力曲线具有多个周期,其相应于所基于的振荡运动的周期。
92.未优化的摩擦力曲线66a具有螺旋形的走向。在每个周期中,摩擦力曲线66a环绕零点一次。在每个周期中,也就是说对于绕零点的每一次环绕,摩擦力曲线66a经过线图的四个象限中的每一个。随着所述速度阶段的、尤其所述周期的上升的最大速度,也就是说示范性地随着上升的频率,摩擦力曲线66a与坐标原点的距离增加,从而摩擦力曲线具有螺旋形的走向。对于摩擦力曲线66a的每个速度值v给出多个不同的摩擦力值。摩擦力曲线66a具有滞后。取决于速度v变得更大还是变得更小,(对于相同的速度v)得出强度不同的摩擦力,例如由于滞后对于相同的速度v不仅得出正的摩擦力而且得出负的摩擦力。摩擦力曲线66a的这种走向从对于质量参数m的错误的假设中得出。
93.压缩空气提供装置4构造成用于在摩擦力曲线66的情况下执行质量参数m的参数优化,以便获得优化的摩擦力曲线66b。例如压缩空气提供装置4执行递归最小二乘法,以便基于未优化的摩擦力曲线66a获得优化的摩擦力曲线66b。压缩空气提供装置4构造成用于计算在质量参数m的哪种质量参数值的情况下在不同的周期之间、尤其在不同的速度阶段之间的摩擦力曲线66的偏差、尤其滞后是最小的,并且将如下质量参数值作为质量信息、尤其质量参数m来提供,在所述质量参数值的情况下所述偏差是最小的。
94.示范性地,压缩空气提供装置4构造成用于应用成本函数,以便计算在哪种质量参数值的情况下偏差是最小的。例如压缩空气提供装置4执行成本函数的最小化,例如,以便获得质量参数值。适宜地,压缩空气提供装置4在质量参数m大于零这一附加条件下执行成本函数的最小化。
95.在图5中示出的优化的摩擦力曲线66b是成本函数最小化的结果。在此,不同的周期、尤其不同的速度阶段基本上具有唯一的摩擦力特征,其中,得出在速度值v与摩擦力值fr之间的(基本上)明确的配属,从而每个速度值v配属有仅仅一个摩擦力值fr。
96.示范性地,优化的摩擦力曲线66b具有基本上s形的走向。优化的摩擦力曲线66b走向经过零点。优化的摩擦力曲线66b示范性地走向经过第一象限和第三象限(并且尤其不经过第二象限和第四象限)。优化的摩擦曲线66b在第一象限中具有负的曲率并且在第三象限中具有正的曲率。
97.压缩空气提供装置4构造成用于基于优化的摩擦力曲线66b测定摩擦信息。例如压缩空气提供装置4基于优化的摩擦力曲线66b产生摩擦力函数,所述摩擦力函数描述取决于速度v的摩擦力fr并且位于优化的摩擦力曲线66b上。所述摩擦力函数适宜地呈现摩擦信息。
98.此外,压缩空气提供装置4能够构造成用于基于摩擦信息计算致动环节3的尤其独立于速度的库伦摩擦lbd。如在图5中示出的那样,例如能够(尤其借助于直线)朝着y轴外推摩擦力曲线66b的与零点间隔开的端部区域。摩擦力fr适宜地作为库伦摩擦lbd来提供,在所述摩擦力的情况下所述外推切割y轴。适宜地,压缩空气提供装置4构造成用于存储库伦摩擦lbd,其中例如通过用户设备49应用和/或发出位置调节。
99.如前面所阐释的那样,也就是说,压缩空气提供装置4构造成用于基于压力值和位置值取决于振荡运动60、尤其振荡速度v计算作用于致动环节3的摩擦力的延伸经过振荡运动60的多个周期63的摩擦力曲线66并且在应用摩擦力曲线66的情况下计算摩擦信息和/或质量信息。摩擦力曲线的摩擦力取决于质量参数m,所述质量参数描述在定位致动环节3时待被置于运动中的质量。压缩空气提供装置4构造成用于计算,在质量参数m的哪种质量参数值的情况下在振荡运动的不同的周期63之间的摩擦力曲线66的偏差是最小的,并且将如下质量参数值作为质量信息m来提供,在所述质量参数值的情况下偏差是最小的。压缩空气提供装置4构造成用于基于如下摩擦力曲线66测定摩擦信息,在所述摩擦力曲线的情况下偏差是最小的。
100.根据优选的设计方案,压缩空气提供装置4构造成用于校验由用户输入的摩擦信息、例如摩擦参数和/或由用户输入的质量信息、例如质量参数。例如压缩空气提供装置4构造成用于将所输入的摩擦信息与所测定的摩擦信息进行比较。如果所输入的摩擦信息与所测定的摩擦信息不一致,压缩空气提供装置4适宜地给用户发出警告,例如通过用户设备49发出警告,和/或为了位置调节应用所测定的摩擦信息代替所输入的摩擦信息。
101.例如,压缩空气提供装置4将所输入的质量信息与所测定的质量信息进行比较。如果所输入的质量信息与所测定的质量信息不一致,压缩空气提供装置4给用户发出警告,例如通过用户设备49发出警告,和/或为了位置调节应用所测定的质量信息代替所输入的质量信息。
102.根据优选的设计方案,压缩空气提供装置4构造成用于将借助协助程序测定的摩擦信息和/或质量信息应用于确定压缩空气提供装置4和/或气动的致动器2的磨损状态、例如老化状态。压缩空气提供装置4尤其构造成用于提供预测性维护功能并且例如在应用所测定的磨损状态的情况下识别老化和/或故障。作为用于确定磨损状态的基础,尤其使用摩擦信息和/或质量信息。
103.如前面所阐释的那样,也就是说,压缩空气提供装置4适宜地构造成用于在应用致动环节3的运动方程的情况下以及所探测的压力值和致动环节的所探测的位置值计算摩擦信息和/或质量信息。示范性地,压缩空气提供装置4在应用软管模块的情况下基于所探测的压力值估算在压力空腔8、9中的压力并且将估算出的压力应用于摩擦信息和/或质量信息的计算。优选地,压缩空气提供装置4对于摩擦信息和/或质量信息的计算不使用附加函数(ansatzfunktion)。此外适宜地,能够自由地选择成本函数,借助所述成本函数计算优化的摩擦力曲线。
104.适宜地,通过所描述的措施实现系统100的简化的投入运行。压缩空气提供装置4通过学习移动(lernfahrt)、尤其通过振荡运动60辨认致动环节3的摩擦、尤其摩擦信息。摩擦的参数辨认通过针对致动环节的运动方程的参数优化(例如通过递归最小二乘法)来进行。所述运动方程还能够被称为动力学方程。优选地,用户不必自己来确定摩擦信息。
105.质量信息通过学习移动、尤其通过振荡运动被可靠化(也就是说,被校验)或被证实。参数辨认通过应用针对致动环节的运动方程的参数优化(例如通过递归最小二乘法)来进行。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。