技术特征:
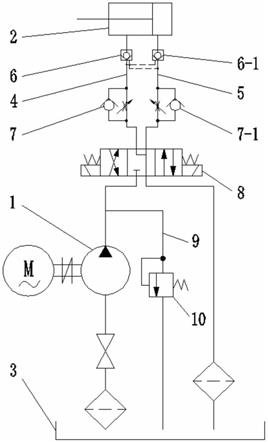
1.一种基于壅塞原理的软体机器人气动系统,其特征在于:包括,外部先导式减压阀,所述外部先导式减压阀的进气端连接气源;第一进气部分,所述第一进气部分连接软体机器人和所述外部先导式减压阀的出气端;其用于控制以第一流量向所述软体机器人内进气,直至所述软体机器人内腔压力趋近目标压力;第二进气部分,所述第二进气部分连接软体机器人和所述外部先导式减压阀的出气端;其用于当所述软体机器人内腔压力趋近所述目标压力时,基于壅塞原理控制以第二流量向所述软体机器人内进气;所述第二流量小于第一流量;所述外部先导式减压阀的控制气路连接所述软体机器人的进口气路。2.根据权利要求1所述的基于壅塞原理的软体机器人气动系统,其特征在于:所述第一进气部分包括进气可调节流阀、低频高速开关阀和第一进气管路,所述第一进气管路连接所述软体机器人和所述外部先导式减压阀的出气端;所述进气可调节流阀设置于所述第一进气管路、其用于控制以所述第一流量进气;所述低频高速开关阀设置于所述第一进气管路、其用于控制向所述软体机器人内进气的通断。3.根据权利要求1所述的基于壅塞原理的软体机器人气动系统,其特征在于:所述第二进气部分包括小孔节流阀、高频高速开关阀和第二进气管路,所述第二进气管路连接所述软体机器人和所述外部先导式减压阀的出气端;所述小孔节流阀设置于所述第二进气管路、其用于控制以所述第二流量进气;所述高频高速开关阀设置于所述第二进气管路、其用于控制向所述软体机器人内进气的通断;所述高频高速开关阀设置于所述小孔节流阀的出气侧。4.根据权利要求2所述的基于壅塞原理的软体机器人气动系统,其特征在于:所述第二进气部分包括小孔节流阀、高频高速开关阀和第二进气管路,所述第二进气管路连接所述软体机器人和所述进气可调节流阀的出气端;所述小孔节流阀设置于所述第二进气管路、其用于控制以所述第二流量进气;所述高频高速开关阀设置于所述第二进气管路、其用于控制向所述软体机器人内进气的通断;所述高频高速开关阀设置于所述小孔节流阀的出气侧。5.根据权利要求1所述的基于壅塞原理的软体机器人气动系统,其特征在于:该系统还包括压力反馈部分,所述压力反馈部分包括能够动态检测所述软体机器人内腔压力的后置压力传感器。6.根据权利要求5所述的基于壅塞原理的软体机器人气动系统,其特征在于:所述压力反馈部分还包括能够动态测量小孔节流阀进口压力的前置压力传感器。7.根据权利要求1所述的基于壅塞原理的软体机器人气动系统,其特征在于:该系统还包括安全气路部分,所述安全气路部分包括安全阀,所述安全阀设置于所述软体机器人的进气管端,其设定压力小于等于所述软体机器人内腔额定压力。8.根据权利要求1所述的基于壅塞原理的软体机器人气动系统,其特征在于:该系统还包括第一出气部分,所述第一出气部分包括连接所述软体机器人的第一出气管路、均设置于所述第一出气管路的出气可调节流阀和出气开关阀;或者还包括第二出气部分,所述第二出气部分包括连接所述软体机器人的第二出气管路、设置于所述第二出气管路的真空气路开关阀和真空泵。
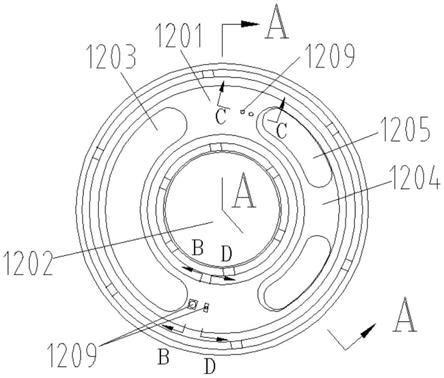
9.根据权利要求1所述的基于壅塞原理的软体机器人气动系统,其特征在于:该系统配置有多路组合阀,所述外部先导式减压阀与所述多路组合阀组装固定;所述多路组合阀的阀体的第一接口(i1)连接所述外部先导式减压阀的出气口,其第二接口(o1)连接所述外部先导式减压阀的控制气路进口,其第三接口(o2)连接高频高速开关阀的进口,其第四接口(i2)连接高频高速开关阀的出口,其第五接口(o3)连接进气可调节流阀的进口,所述进气可调节流阀的出口连接低频高速开关阀的进口;其第六接口(o4)连接后置压力传感器;所述多路组合阀的阀体还具有三个第七接口(io),所述三个第七接口(io)分别连接低频高速开关阀的出口、安全阀的进口和所述软体机器人;所述三个第七接口、第四接口(i2)、第二接口(o1)和第六接口(o4)在所述多路组合阀的阀体内相互连通。10.根据权利要求1所述的基于壅塞原理的软体机器人气动系统,其特征在于:该系统配置有多路组合阀,所述多路组合阀的阀体的第一接口(i1)连接所述外部先导式减压阀的出口,其第二接口(o1)连接所述外部先导式减压阀的控制气路进口,其第三接口(o2)连接高频高速开关阀的进口,其第四接口(i2)连接高频高速开关阀的出口,其第五接口(o3)连接低频高速开关阀的进口,其第六接口(o4)连接后置压力传感器;所述多路组合阀的阀体还具有三个第七接口(io),所述三个第七接口分别连接低频高速开关阀的出口、安全阀的进口和软体机器人;所述三个第七接口、第四接口(i2)、第二接口(o1)和第六接口(o4)在所述多路组合阀的阀体内相互连通。
技术总结
本发明涉及一种基于壅塞原理的软体机器人气动系统,包括外部先导式减压阀,外部先导式减压阀的进气端连接气源;第一进气部分,第一进气部分连接软体机器人和所述外部先导式减压阀的出气端;其用于控制以大流量向所述软体机器人内进气,直至所述软体机器人内腔压力趋近目标压力;第二进气部分,所述第二进气部分连接软体机器人和所述外部先导式减压阀的出气端;用于当所述软体机器人内腔压力达到所述目标压力时,基于壅塞原理控制以微流量向所述软体机器人内进气。本发明气动系统,第一种运行模式下能够驱动软体机器人快速响应、反应灵敏;第二种运行模式下能够可靠的较长时间维持完全壅塞流状态,该模式下能够较高精度的控制驱动软体机器人动作。制驱动软体机器人动作。制驱动软体机器人动作。
技术研发人员:章军 刘禹 庞玮 王震宇 陈彦秋 吕兵
受保护的技术使用者:江南大学
技术研发日:2021.06.08
技术公布日:2021/9/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。