1.本发明涉及气压驱动(简称“气动”)技术领域,尤其是指一种基于壅塞原理的软体机器人气动系统,主要应用于气动软体机器人,尤其应用于气动软体手指或气动人工肌肉。
背景技术:
2.软体机器人的设计是模仿自然界各种软体生物,如蚯蚓、章鱼、水母等,其利用软体材料(如橡胶)制作,能够适应各种非结构化环境,与人类的交互也更安全。软体机器人由气动系统驱动实现动作,其与气缸驱动区别是由于没有气缸活塞和活塞杆的二个密封摩擦,小、微流量驱动时不会产生“爬行”现象。
3.为了快速执行操作,现有用于气缸驱动气动系统的节流是基于非完全壅塞流原理,其不足之处包括:气体压缩性大,常用气体节流阀的通径大,开关阀开启过程中引起流量的动态变化大,节流阀出口流量和压力表现为强非线性关系,采用高速开关阀也很难通过流量参数进行气缸驱动压力高精度控制。
4.为了克服基于非完全壅塞流原理气动系统的缺陷,相关文献公开了基于完全壅塞流原理用于气缸驱动的气动系统,根据空气动力学的完全壅塞流原理:采用小孔节流阀(带小孔的不可调节流阀),其开口很小、且固定不变,相当于小孔的“慢漏气”现象,当小孔节流阀出口压力与进口压力之比小于0.528时进入完全壅塞流状态,节流阀小孔处的气体速度为声速,此时小孔节流阀出口的气体质量流量恒定不变,开关阀开闭过程小孔节流阀质量流量的阶跃性好,便于通过质量流量参数进行气动执行器的建模、数值计算与压力控制。但完全壅塞流下的体积流量很小,气动执行器动作太慢,同时出口压力与进口压力之比小于0.528的完全壅塞流状态与小孔节流阀孔径和进口压力相关,孔径大和进口压力大、则流量大,满足条件后持续时间短。
5.另一方面,虽然基于壅塞流原理气动系统驱动的软体机器人能够便于通过质量流量参数进行气动执行器的建模、数值计算与压力控制,但是基于壅塞流原理气动系统驱动下的软体机器人的响应速度非常慢。
技术实现要素:
6.为此,本发明所要解决的技术问题在于克服现有技术中驱动软体机器人的气动系统很难维持完全壅塞流状态、以及造成软体机器人响应速度慢的问题,提供一种基于壅塞原理的软体机器人气动系统,第一种运行模式下能够驱动软体机器人快速响应、反应灵敏;第二种运行模式下能够可靠的较长时间维持完全壅塞流状态,该模式下能够较高精度的控制驱动软体机器人动作。
7.为解决上述技术问题,本发明提供了一种基于壅塞原理的软体机器人气动系统,包括,
8.外部先导式减压阀,所述外部先导式减压阀的进气端连接气源;
9.第一进气部分,所述第一进气部分连接软体机器人和所述外部先导式减压阀的出
气端;其用于控制以第一流量向所述软体机器人内进气,直至所述软体机器人内腔压力趋近目标压力;
10.第二进气部分,所述第二进气部分连接软体机器人和所述外部先导式减压阀的出气端;其用于当所述软体机器人内腔压力趋近所述目标压力时,基于壅塞原理控制以第二流量向所述软体机器人内进气;所述第二流量小于第一流量;
11.所述外部先导式减压阀的控制气路连接所述软体机器人的进口气路。
12.在本发明的一个实施例中,所述第一进气部分包括进气可调节流阀、低频高速开关阀和第一进气管路,所述第一进气管路连接所述软体机器人和所述外部先导式减压阀的出气端;所述进气可调节流阀设置于所述第一进气管路、其用于控制以所述第一流量进气;所述低频高速开关阀设置于所述第一进气管路、其用于控制向所述软体机器人内进气的通断。
13.在本发明的一个实施例中,所述第二进气部分包括小孔节流阀、高频高速开关阀和第二进气管路,所述第二进气管路连接所述软体机器人和所述外部先导式减压阀的出气端;所述小孔节流阀设置于所述第二进气管路、其用于控制以所述第二流量进气;所述高频高速开关阀设置于所述第二进气管路、其用于控制向所述软体机器人内进气的通断;所述高频高速开关阀设置于所述小孔节流阀的出气侧。
14.在本发明的一个实施例中,所述第二进气部分包括小孔节流阀、高频高速开关阀和第二进气管路,所述第二进气管路连接所述软体机器人和所述进气可调节流阀的出气端;所述小孔节流阀设置于所述第二进气管路、其用于控制以所述第二流量进气;所述高频高速开关阀设置于所述第二进气管路、其用于控制向所述软体机器人内进气的通断;所述高频高速开关阀设置于所述小孔节流阀的出气侧。
15.在本发明的一个实施例中,该系统还包括压力反馈部分,所述压力反馈部分包括能够动态检测所述软体机器人内腔压力的后置压力传感器。
16.在本发明的一个实施例中,所述压力反馈部分还包括能够动态测量小孔节流阀进口压力的前置压力传感器。
17.在本发明的一个实施例中,该系统还包括安全气路部分,所述安全气路部分包括安全阀,所述安全阀设置于所述软体机器人的进气管端,其设定压力小于等于所述软体机器人内腔额定压力。
18.在本发明的一个实施例中,该系统还包括第一出气部分,所述第一出气部分包括连接所述软体机器人的第一出气管路、均设置于所述第一出气管路的出气可调节流阀和出气开关阀;或者还包括第二出气部分,所述第二出气部分包括连接所述软体机器人的第二出气管路、设置于所述第二出气管路的真空气路开关阀和真空泵。
19.在本发明的一个实施例中,该系统配置有多路组合阀,所述外部先导式减压阀与所述多路组合阀组装固定;所述多路组合阀的阀体的第一接口(i1)连接所述外部先导式减压阀的出气口,其第二接口(o1)连接所述外部先导式减压阀的控制气路进口,其第三接口(o2)连接高频高速开关阀的进口,其第四接口(i2)连接高频高速开关阀的出口,其第五接口(o3)连接进气可调节流阀的进口,所述进气可调节流阀的出口连接低频高速开关阀的进口;其第六接口(o4)连接后置压力传感器;所述多路组合阀的阀体还具有三个第七接口(io),所述三个第七接口(io)分别连接低频高速开关阀的出口、安全阀的进口和所述软体
机器人;所述三个第七接口、第四接口(i2)、第二接口(o1)和第六接口(o4)在所述多路组合阀的阀体内相互连通。
20.在本发明的一个实施例中,该系统配置有多路组合阀,所述多路组合阀的阀体的第一接口(i1)连接所述外部先导式减压阀的出口,其第二接口(o1)连接所述外部先导式减压阀的控制气路进口,其第三接口(o2)连接高频高速开关阀的进口,其第四接口(i2)连接高频高速开关阀的出口,其第五接口(o3)连接低频高速开关阀的进口,其第六接口(o4)连接后置压力传感器;所述多路组合阀的阀体还具有三个第七接口(io),所述三个第七接口分别连接低频高速开关阀的出口、安全阀的进口和软体机器人;所述三个第七接口、第四接口(i2)、第二接口(o1)和第六接口(o4)在所述多路组合阀的阀体内相互连通。
21.本发明的上述技术方案相比现有技术具有以下优点:
22.本发明所述的基于壅塞原理的软体机器人气动系统,压缩空气先经过外部先导式减压阀减压处理,其出气端输出压力稳定的压缩空气,所述外部先导式减压阀处理后的压缩空气分二路,一路由大流量气路的第一进气部分向软体机器人内腔进气,实现驱动软体机器人快速响应动作;一路由微流量气路的第二进步部分向软体机器人内腔进气,控制该微流量气路的进出口压力以满足完全壅塞流状态,从而精确控制软体机器人内腔压力至目标压力,实现驱动软体机器人精细动作;同时,所述外部先导式减压阀的控制气路连接所述软体机器人的进口气路,使得具有微流量气路的第二进气部分能够可靠的较长时间维持完全壅塞流状态。所述的气动系统能够兼容实现第一种运行模式下驱动软体机器人快速响应、反应灵敏;第二种运行模式下可靠的较长时间维持完全壅塞流状态,该模式下能够较高精度的控制驱动软体机器人精细动作。
附图说明
23.为了使本发明的内容更容易被清楚的理解,下面根据本发明的具体实施例并结合附图,对本发明作进一步详细的说明,其中,
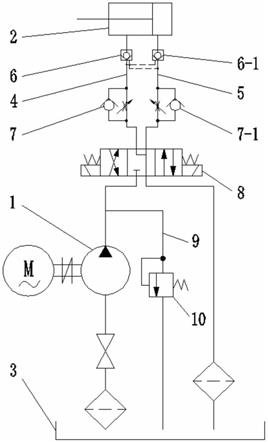
24.图1为本发明第一实施例中基于壅塞原理的软体机器人气动系统的原理图;
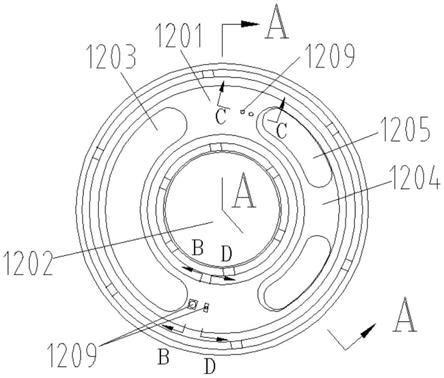
25.图2为第一实施例下使用的多路组合阀的主视图;、
26.图3为图2所示多路组合阀a
‑
a方向剖视图;
27.图4为图3所示多路组合阀b
‑
b方向剖视图;
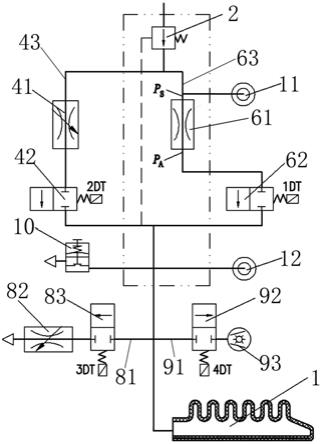
28.图5为本发明第二实施例中基于壅塞原理的软体机器人气动系统的原理图;
29.图6为第二实施例下使用的多路组合阀的主视图;
30.图7为图6所示多路组合阀c
‑
c方向剖视图;
31.图8为图7所示多路组合阀d
‑
d方向剖视图。
32.说明书附图标记说明:
[0033]1‑
软体机器人;2
‑
外部先导式减压阀;41
‑
进气可调节流阀,42
‑
低频高速开关阀,43
‑
第一进气管路;61
‑
小孔节流阀,62
‑
高频高速开关阀,63
‑
第二进气管路;81
‑
第一出气管路,82
‑
出气可调节流阀,83
‑
出气开关阀;91
‑
第二出气管路,92
‑
真空气路开关阀,93
‑
真空泵;10
‑
安全阀;11
‑
前置压力传感器,12
‑
后置压力传感器。
[0034]
多路组合阀中:101、阀孔圆片;102、大密封圈;103、径向孔旋盖;104、可拆堵头;105、小密封圈;106、大阀体;107、小阀体;108、不可拆堵头;109、锥头节流阀芯;110、锁紧薄
螺母;111、菱形座;112、细密封圈。
具体实施方式
[0035]
下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
[0036]
实施例一
[0037]
参照图1所示,本发明公开一种基于壅塞原理的软体机器人气动系统,包括外部先导式减压阀2,所述外部先导式减压阀2的进气端连接气源;第一进气部分,所述第一进气部分连接软体机器人1和所述外部先导式减压阀2的出气端;其用于控制以第一流量向所述软体机器人1内进气,直至所述软体机器人1内腔压力趋近目标压力;第二进气部分,所述第二进气部分连接软体机器人1和所述外部先导式减压阀2的出气端;其用于当所述软体机器人1内腔压力达到所述目标压力时,基于壅塞原理控制以第二流量向所述软体机器人1内进气;所述第二流量远小于第一流量;所述外部先导式减压阀2的控制气路连接所述软体机器人1的进口气路。
[0038]
所述的基于壅塞原原理的软体机器人气动系统,包括外部先导式减压阀2,所述外部先导式减压阀2的进气端连接气源,气源的压缩空气先经过外部先导式减压阀2减压处理,其出气端输出压力稳定的压缩空气;所述外部先导式减压阀2处理后的压缩空气分二路,一路由第一进气部分向所述软体机器人1内腔进气;一路由第二进气部分向所述软体机器人1内腔进气。其中,所述第一进气部分控制以第一流量向所述软体机器人1内进气,直至所述软体机器人1内腔压力趋近目标压力;所述第一流量设定为大流量,初始状态下或者所述软体机器人内腔压力未达到所述目标压力时,由所述第一进气部分向所述软体机器人内腔大流量进气,运行在大流量模式下,实现驱动所述软体机器人1快速响应动作。
[0039]
当所述软体机器人1内腔压力趋近所述目标压力时,所述第一进气部分被断开,所述第二进气部分以第二流量向所述软体机器人1内进气直至其内腔压力达到目标压力。所述第二流量设定为微流量,以第二进气部分小孔节流阀61的进出口压力以满足壅塞流状态为基础,通过控制二进气部分快速开闭,从而精确控制软体机器人内腔压力至目标压力,实现驱动软体机器人精细动作,比如精确控制所述软体机器人1位姿、接触状态等。
[0040]
所述外部先导式减压阀2的控制气路连接所述软体机器人1的进口气路,使得具有微流量气路的第二进气部分能够可靠的较长时间维持完全壅塞流状态。具体的,参照图1所示,所述第一进气部分包括进气可调节流阀41、低频高速开关阀42和第一进气管路43,所述进气可调节流阀41的流量可调;所述低频高速开关阀42的开关频率小于100hz;所述第一进气管路43连接所述软体机器人1和所述外部先导式减压阀2的出气端;所述进气可调节流阀41设置于所述第一进气管路43、其用于控制以所述第一流量进气;所述低频高速开关阀42设置于所述第一进气管路43、其用于控制向所述软体机器人1内进气的通断。所述第二进气部分包括小孔节流阀61、高频高速开关阀62和第二进气管路63,所述小孔节流阀的孔径为0.05~2mm;所述高频高速开关阀62的开关频率为100hz或者大于100hz。所述第二进气管路63连接所述软体机器人1和所述外部先导式减压阀2的出气端;所述小孔节流阀61设置于所述第二进气管路63、其用于控制以所述第二流量进气;所述高频高速开关阀62设置于所述第二进气管路63、其用于控制向所述软体机器人1内进气的通断。
[0041]
为了确保软体机器人1安全性,该系统还包括安全气路部分,所述安全气路部分包括安全阀10,所述安全阀10设置于所述软体机器人1的进气管端,其设定压力小于等于所述软体机器人1内腔额定压力,确保软体机器人1的安全性。
[0042]
初始状态或者所述软体机器人1内腔压力低于90%~99%目标压力时,由第一进气部分向所述软体机器人1内腔大流量进气,当所述软体机器人1内腔压力达到目标压力的90%~99%时,第一进气部分断开,由第二进气部分向所述软体机器人1内腔微流量进气;当所述软体机器人1内腔压力达到目标压力时第二进气部分断开。
[0043]
为了精确控制两种模式切换,所述的气动系统还包括压力反馈部分,所述压力反馈部分包括能够动态检测所述软体机器人1内腔压力、以及动态检测所述外部先导式减压阀2出口压力的后置压力传感器12,根据所述后置压力传感器12反馈的所述软体机器人1内腔压力,切换所述气动系统的运行模式。根据所述后置压力传感器12反馈的所述外部先导式减压阀2先导反馈口压力(也就是软体机器人1内腔压力),能够更精确的控制第二进气部分长时间维持完全壅塞流状态。
[0044]
所述外部先导式减压阀2的控制气路连接所述软体机器人1的进口气路,压缩空气压力低于所述软体机器人1内腔额定压力,满足所述软体机器人1安全性需求,且保证小孔节流阀的出口压力与进口压力之比小于0.528,从而满足壅塞条件。例如,由空压机和气罐组成的恒压气源的系统压力是0.7mpa,所述安全阀10的设定压力0.33mpa,所述软体机器人1内腔最大承载压力0.35mpa、最大工作压力为0.32mpa;所述外部先导式减压阀1出口压力须大于0.61(即0.32/0.528,所述软体机器人1进口气路的压力达到其最大工作压力0.32mpa状况下、能满足小孔节流阀壅塞条件);当软体机器人1进口气路的压力小于0.32mpa时,所述外部先导式减压阀2开启;当软体机器人1进口气路的压力等于0.32mpa时,所述外部先导式减压阀2控制气路促使其关闭,从而保证小孔节流阀61始终工作在完全壅塞流状态下。所述软体机器人1进口气路的压力小于0.32mpa的前提下,根据后置压力传感器12反馈的软体机器人1内腔压力,当软体机器人1内腔压力达到目标压力(小于0.32mpa的任意值)的90
‑
99%时,控制从大流量模式转为微流量模式,并根据后置压力传感器12反馈的外部先导式减压阀2先导反馈口压力(也就是软体机器人1内腔压力)、采用pwm方式控制高频高速开关阀42通断、达到精确的目标压力。
[0045]
参照图1所示,所述的气动系统还包括第一出气部分,所述第一出气部分包括连接所述软体机器人1的第一出气管路81、均设置于所述第一出气管路81的出气可调节流阀82和出气开关阀83。所述软体机器人1位姿或接触状态的持续时间过后,3dt通电、所述出气开关阀83通电接通,软体机器人1内腔气体直接排出,或者通过出气可调节流阀82排出,软体机器人1内腔气体压力通大气(内腔气体压力为零),3dt断电、所述出气开关阀83断电断开;需要改变软体机器人1初始状态时,软体机器人1内腔气体压力可以大于零(提前断电3dt)。
[0046]
所述高频高速开关阀62设置于所述小孔节流阀61的出气侧,使得所述高频高速开关阀62开闭瞬间不影响小孔节流阀61进口压力,在满足小孔节流阀61的出口压力与进口压力之比小于0.5282的壅塞条件下,高频高速开关阀62开闭瞬间、小孔节流阀61的出口压力(即软体机器人1的内腔压力)不断增大的变化均不影响小孔节流阀61质量流量。微流量模式下小孔节流阀61开闭瞬间的质量流量的阶跃性好,通过高频高速开关阀62开闭达到质量流量的脉冲控制效果。
[0047]
参照图1所示,所述的气动系统还包括第二出气部分,所述第二出气部分包括连接所述软体机器人1的第二出气管路91、设置于所述第二出气管路91的真空气路开关阀92和真空泵93。需要所述软体机器人(比如气动软体手指)向外反向弯曲的初始状态时、或气动软体手指向外反向抓取(与向内捏取方式相反的向外撑开式抓取)时,均须负压状态,负压状态实现是4dt通电、真空气路开关阀92接通真空泵93或真空罐。
[0048]
所述外部先导式减压阀2控制目标包括:
①
所述软体机器人1的驱动气体压力须低于软体机器人1内腔额定压力,满足软体机器人1安全性需求;
②
保证小孔节流阀的出口压力与进口压力之比小于0.528,从而满足壅塞条件。具体是:恒压气源的压缩空气经过外部先导式减压阀2输出分为二路,一路通过第一进气管路进入软体机器人1内腔,一路通过第二进气管路进入软体机器人内腔,其中第一进气管路上进气可调节流阀41、低频高速开关阀42控制以大流量进气,第二进气管路上的小孔节流阀61、高频高速开关阀62控制进入壅塞状态以微流量进气,然后所述第一进气管路与第二进气管路的出口合并到软体机器人1的进气管,压缩空气进入软体机器人1内腔驱动,外部先导式减压阀2的反馈控制气路与软体机器人2进气管连通(图1中虚线所示);后置压力传感器12、安全阀10进口、出气开关阀83进口、真空气路开关阀92进口均软体机器人1进气管接通;出气开关阀83出口直接通大气,或者连接出气可调节流阀82进口,出气可调节流阀82出口通大气;软体机器人1多路气动系统有或无真空气路开关阀11、真空泵12或真空罐组成的真空气路,真空气路开关阀11出口连接真空泵12或真空罐。
[0049]
所述外部先导式减压阀的进气端连接的气源是恒压气源或非恒压气源,超高精度要求时,所述恒压气源是由空压机和气罐组成,采用恒压气源时数学建模与控制策略简单;高精度要求时,采用非恒压气源时动态的数学建模与控制策略较为复杂,在所述小孔节流阀的进口端接一个前置压力传感器11,动态测量所述小孔节流阀的进口压力。
[0050]
所述的气动系统的应用配套有多路组合阀,所述多路组合阀包括(图1中双点划线框内的)外部先导式减压阀2、小孔节流阀61和连接管路,参照图2、3、4所示,外部先导式减压阀2(图中未画出)与多路组合阀靠螺钉装配在一起;多路组合阀上的大阀体106集中了所有气路,气路连接为:大阀体106的第一接口i1接外部先导式减压阀2出口,第二接口o1接接外部先导式减压阀2控制气路进口,均靠小密封圈105进行端面密封;第三接口o2管接高频高速开关阀62进口,第四接口i2管接高频高速开关阀62出口;第五接口o3管接进气可调节流阀41进口,进气可调节流阀41出口直接连接低频高速开关阀42进口;第六接口o4接后置压力传感器12;所述大阀体还具有三个第七接口io,所述三个第七接口io、第四接口i2、第二接口o1和第六接口(o4)在所述多路组合阀的阀体内相互连通。三个第七接口io任意管接低频高速开关阀42出口、安全阀10进口、软体机器人1气路。
[0051]
靠径向孔旋盖103下端的螺纹,将阀孔圆片101固定在大阀体106上,阀孔圆片101和大阀体106之间有小密封圈105端面密封,径向孔旋盖103与大阀体106之间有大密封圈102端面密封;阀孔圆片101中心的小孔下部是锥孔,阀孔圆片101中心的小孔、锥孔与大阀体106上的锥孔均有同轴度要求,大阀体106上的锥孔端部有可拆堵头104的螺纹紧固密封;大阀体106上的锥孔、o3口、i1口三者是相通的,大阀体106、阀孔圆片101、小密封圈105、径向孔旋盖103构成所述小孔节流阀61。
[0052]
所述外部先导式减压阀2是从阀外部(软体机器人1进气管)引入反馈控制气压到
先导阀芯的减压阀,其进口压力与下游引压反馈先导控制口压力之差为大压差,其下游引压反馈先导控制气路孔径细、容积小,先导作用耗气量少。
[0053]
根据操作时间与控制精度要求,所述小孔节流阀61可以更换不同小孔孔径的阀孔圆片101,小孔孔径范围为0.05
‑
2mm。
[0054]
另一种方案中,增加一个io,i2口、o1口、o4口、四个io口,这七个孔是相通的,增加一个io管接出气开关阀83的进口;或者增加二个io,i2口、o1口、o4口、五个io口这八个孔是相通的,增加二个io分别管接出气开关阀83、气路开关阀92的进口。
[0055]
实施例二
[0056]
本发明实施例还公开一种基于壅塞原理的软体机器人气动系统,与实施例一的区别在于第二进气部分的设置不同:
[0057]
参照图5所示,所述第二进气部分包括小孔节流阀61、高频高速开关阀62和第二进气管路63,所述第二进气管路63连接所述软体机器人1和所述进气可调节流阀41的出气端;所述小孔节流阀61设置于所述第二进气管路63、其用于控制以所述第二流量进气;所述高频高速开关阀62设置于所述第二进气管路63、其用于控制向所述软体机器人1内腔进气的开闭。
[0058]
所述的基于壅塞原原理的软体机器人气动系统,包括外部先导式减压阀2,所述外部先导式减压阀2的进气端连接气源,气源的压缩空气先经过外部先导式减压阀2减压处理,其出气端输出压力稳定的压缩空气,所述外部先导式减压阀2处理后的压缩空气再经过进气可调节流阀41节流处理;所述进气可调节流阀41节流处理后的压缩空气分二路,一路由第一进气管路43向所述软体机器人1内腔进气;一路由第二进气管路63向所述软体机器人1内腔进气。其中,控制所述第一进气管路43以第一流量向所述软体机器人1内进气,直至所述软体机器人1内腔压力趋近目标压力;所述第一流量设定为大流量,初始状态下或者所述软体机器人内腔压力未达到所述目标压力时,由所述第一进气管路43向所述软体机器人1内腔进气,运行在第一种模式下(即大流量模式),实现驱动所述软体机器人1快速响应动作。当所述软体机器人1内腔压力达到所述目标压力时,控制所述第二进气管路63以第二流量向所述软体机器人1内进气直至其内腔压力达到目标压力。所述第二流量设定为微流量,通过控制小孔节流阀61的进出口压力以满足壅塞流状态,从而精确控制软体机器人内腔压力至目标压力,实现驱动软体机器人精细动作,比如精确控制所述软体机器人1位姿、接触状态等。所述外部先导式减压阀2的控制气路连接所述软体机器人1的进口气路,使得具有微流量气路的第二进气部分能够可靠的较长时间维持完全壅塞流状态。
[0059]
压缩空气进入软体机器人1内腔驱动外部先导式减压阀2的反馈控制气路与软体机器人1进气管连通;后置压力传感器12、安全阀10进口、出气开关阀83进口、真空气路开关阀92进口均与软体机器人1进气管接通;出气开关阀83出口直接通大气,或者连接出气可调节流阀82进口,出气可调节流阀82出口通大气;软体机器人气动系统有或无真空气路开关阀92、真空泵93或真空罐组成的真空气路,真空气路开关阀92出口连接真空泵93或真空罐。
[0060]
所述的气动系统的应用配套有多路组合阀,所述多路组合阀包括(图5中双点划线框内的)小孔节流阀61、进气可调节流阀41和连接管路,如图6
‑
8所示,外部先导式减压阀2(图中未画出)与小阀体107通过二根管路连接;小阀体107集中了所有气路,气路连接是:第一接口i1管接外部先导式减压阀2出口,第二接口o1管接接外部先导式减压阀2控制气路进
口;第三接口o2管接高频高速开关阀62进口,第四接口i2管接高频高速开关阀62出口;第五接口o3管接低频高速开关阀42进口;第六接口o4管接后置压力传感器12;所述小阀体还具有三个第七接口io,所述三个第七接口io、第四接口i2、第二接口o1和第六接口(o4)在所述多路组合阀的阀体内相互连通。第七接口io任意管接低频高速开关阀42出口、安全阀10进口、软体机器人1气路。
[0061]
靠径向孔旋盖103下端的螺纹,将阀孔圆片101固定在小阀体107上,阀孔圆片101和小阀体107之间有小密封圈105端面密封,径向孔旋盖103与小阀体107之间有大密封圈102端面密封;阀孔圆片101中心的小孔下部是锥孔,阀孔圆片101中心的小孔、锥孔与小阀体107上的锥孔均有同轴度要求,小阀体107上的锥孔端部有可拆堵头104的螺纹紧固密封;锥头节流阀芯109、锁紧薄螺母110、菱形座111上的螺纹均为细牙调节螺纹,菱形座111上下二孔用螺钉固定在小阀体107上,锥头节流阀芯109上螺纹在菱形座111上的螺纹孔中旋转调节到位后,用锁紧薄螺母110锁固,菱形座111和小阀体107之间有细密封圈112,细密封圈112的作用是菱形座111的端面密封、也是锥头节流阀芯109细圆柱段的径向密封,同时小阀体107上有小密封圈105,小密封圈105的作用是锥头节流阀芯109粗圆柱段的径向密封;连接小阀体107上的锥孔、与锥头节流阀芯109间隙配合孔、o3口孔的通孔外端用不可拆堵头108堵塞,小阀体107上i1口的气体经过锥头节流阀芯109的锥面可调间隙(旋转锥头节流阀芯109),与锥孔、o3口相通并实现流量调节。
[0062]
小阀体107、阀孔圆片101、小密封圈105、径向孔旋盖103构成所述小孔节流阀61;小阀体107、锥头节流阀芯109、锁紧薄螺母110、菱形座111、细密封圈112、小密封圈105构成所述进气可调节流阀41。
[0063]
以上所述实施例中的所述的基于壅塞原理的软体机器人气动系统,
①
主要应用于气动软体机器人等领域,如气动软体手指、气动人工肌肉,因为无橡胶密封的滑动摩擦,因而克服了使用气缸时的爬行缺陷;
②
通过低频高速开关阀42控制大流量气路,反应灵敏,使软体机器人内腔压力初始控制更接近目标压力;
③
同时因小孔节流阀61输出流量小,通过高频高速开关阀62控制,使软体机器人1内腔压力最终控制精度高;
④
高频高速开关阀62放在小孔节流阀61出气侧,高频高速开关阀62的开闭瞬间不影响小孔节流阀61进口压力,小孔节流阀61质量流量瞬间不变;
⑤
并将外部先导式减压阀的控制口与软体机器人内腔连接,控制软体机器人内腔最大压力,保证软体机器人内腔承载的安全性,同时还增加了安全阀,进一步提高软体机器人使用的安全性。本发明气动系统动态性能好、反应灵敏、控制精度高,同时对软体机器人的安全性也大大提高,完全壅塞状态的条件可靠保证。
[0064]
具有以下技术优势:
[0065]
①
基于壅塞条件小孔节流阀61,应用气动软体机器人领域,尤其气动软体手指或气动人工肌肉,根据气体质量流量是恒定不变原理,便于通过质量流量参数进行数学建模、数值计算与压力控制。
[0066]
②
微流量气路、大流量气路并联,在后置压力传感器反馈下,接近目标压力时,低频高速开关阀42断开进气可调节流阀41的大流量气路的同时,高频高速开关阀62脉冲控制小孔节流阀61的微流量气路通断,从而精确控制气动执行器,尤其是软体机器人的内腔压力。
[0067]
③
高频高速开关阀62设置于小孔节流阀61出口侧,高频高速开关阀62开启时小孔
节流阀61的进口压力不变,利于数学模型建立、动态分析与流量控制。
[0068]
④
采用外部先导式减压阀2,其进口压力与下游引压反馈先导控制口压力之差为大压差,其下游引压反馈先导控制气路孔径细、容积小,先导作用耗气量少;控制气路接到软体机器人进气路,从而保证软体机器人驱动压力低于其承载压力,安全性好;尤其保证了小孔节流阀61的出口压力与进口压力之比小于0.528,满足壅塞条件,从而使小孔节流阀61始终工作在壅塞状态。
[0069]
⑤
增加了安全阀10,进一步提高的软体机器人使用的安全性。
[0070]
⑥
设有真空气路,从而使得软体机器人反向动作,作用空间更大。
[0071]
⑦
对于弹性橡胶材料制造的软体机器人,在大流量方式持续过程中,根据算法,通过动态控制高频高速开关阀62的开闭,可抑制软体机器人运动过程中的振动。
[0072]
本发明气动系统目的是:低频高速开关阀42控制的大流量模式下敏捷迅速地、尽可能地接近控制目标压力,微流量模式下小孔节流阀61开闭瞬间的质量流量阶跃性好,通过高频高速开关阀62开闭达到质量流量的脉冲控制效果,从而达到压力控制的高精度。
[0073]
显然,上述实施例仅仅是为清楚地说明所作的举例,并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。