1.本发明涉及一种根据权利要求1的前序部分所述的轴向活塞机。
背景技术:
2.由de 39 04 782 a1已知一种斜盘结构的轴向活塞机。在驱动轴与缸筒之间布置了活塞
‑
缸
‑
单元,所述缸筒的端面能够用所述活塞
‑
缸
‑
单元朝控制面压紧。加载在所述活塞
‑
缸
‑
单元中的控制压力被从控制空隙中提取,在所述控制空隙中加载(anliegen)着高压。
技术实现要素:
3.本轴向活塞机的优点在于,在端面与控制面之间出现的泄漏在所有运行条件下是最小的。本轴向活塞机能够用特别高的转速并且用特别高的压力来运行。
4.按照权利要求1来提出,所述控制压力通过能调节的控制阀来提供,其中所述控制阀如此被连接到控制装置上,使得其能够由所述控制装置来调节,其中所述控制装置实现了一种调节器,该调节器的调节参量影响对于所述控制阀的调节。所述轴向活塞机优选以斜盘结构来实施,其中所述缸
‑
活塞
‑
单元被支撑在驱动轴上。所述轴向活塞机也能够以斜轴结构来实施。所述控制阀优选能够以电气的方式来调节。所述控制装置优选包括数字计算机,其中所述调节器以数字方式来实现。所述调节器优选是连续的、线性的调节器,该调节器至多优选以时间离散的方式来计算。所述调节器优选是pi调节器。
5.在从属权利要求中说明了本发明的有利的拓展方案和改进方案。
6.能够规定,所述控制压力被连接到第一压力传感器上,其中所述第一压力传感器被连接到控制装置上,其中所提到的调节器的实际参量是第一压力传感器的测量值,其中所述调节器的额定参量至少能够根据轴向活塞机的高压来选择。也能够考虑,用传感器来查明所述实际参量,所述传感器直接测量端面与控制面之间的流体静力的润滑膜的厚度。最后,刚好这个厚度应该具有所定义的数值,从而尽管如此以尽可能小的泄漏产生端面与控制面之间的基本上完全的液压的卸荷。但是,这样的流体膜
‑
厚度
‑
传感器极其昂贵。用所提出的成本低得多的第一压力传感器,可以获得类似的结果,如果如所建议的那样来选择所分配的额定值。
[0007]“完全的液压的卸荷”应该是指一种状态,在该状态中在端面与控制面之间不存在任何机械接触,其中那里的压力以流体静力的方式通过在轴向活塞机中所使用的压力流体来传递。所述压力流体优选是液体并且至多优选是液压油。所述轴向活塞机优选具有第一和第二工作接头,其中所述缸筒的旋转伴随着第一与第二工作接头之间的流体流。所述轴向活塞机能够具有4象限能力,也就是说它不仅能够用缸筒的两个相反的旋转方向来运行而且能够沿着每个旋转方向用分别两个相反的通流方向来运行,无论在所述第一和第二工作接头上加载着哪些压力。所述高压是所述第一工作接头上的压力和所述第二工作接头上
的压力中的较高的压力。所述高压优选被连接到第二压力传感器上。所述第二压力传感器优选被连接到所述控制装置上。
[0008]
能够规定,在所述控制装置中存储了至少一条第一组合特性曲线,所述第一组合特性曲线作为输入参量至少具有所述高压,其中所述第一组合特性曲线作为输出参量具有调节器的额定参量。所述第一和/或下面要提及的第二组合特性曲线能够以数值表的形式来实现。也能够借助于数学上的内插公式来实现第一和/或第二组合特性曲线。同样能够考虑这两种实现方式的混合形式。能够考虑,所述第一和下面还要解释的第二组合特性曲线在使用上面所提及的流体膜
‑
厚度
‑
传感器的情况下通过实验来如此查明,从而产生所期望的比例。同样能够考虑,所述第一和/或第二组合特性曲线通过计算机模拟来查明。
[0009]
能够规定,所述第一组合特性曲线作为另外的输入参量具有缸筒的转速和/或轴向活塞机的回转角和/或压力流体的粘度。所述轴向活塞机优选具有能调节的置换容积。就斜盘结构机而言,所述回转角描绘了回转摇架(schwenkwiege)的对此来说必需的偏转。就斜轴结构机而言,所述回转角描绘了驱动轴的旋转轴线与缸筒的旋转轴线之间的角度。所述压力流体的粘度优选在使用温度传感器的情况下查明,其中从相应的测量值和压力流体的温度
‑
粘度
‑
特性曲线中查明其粘度。
[0010]
能够设置流体源,通过该流体源向所述控制阀供给压力流体。所述流体源优选由第一和/或第二工作接头来形成。所述第一和第二工作接头能够在输入侧被连接到换向阀上,其中所述控制阀能够在输出侧被连接到换向阀上。所述流体源也能够由单独的控制油泵来形成。
[0011]
能够规定,所述控制阀包括唯一的能连续调节的控制挡板,其中通过所述控制装置能够调节控制挡板的开口横截面。优选在所述控制阀上的相应的调节信号与所述控制挡板的开口横截面之间存在随时间变化的关联。尤其所提到的关联不是由另外的下级的调节回路来定义。比如,所述控制阀上的调节电流差不多与控制挡板的开口横截面成比例。所述控制阀优选是2/2
‑
比例
‑
方向阀,其至多优选被构造为直接受控制的结构。也能够考虑使用3/2
‑
比例
‑
方向阀,其额外地被连接到流体吸收源、比如壳体的基本上无压力的内部空间或者储箱上。也能够考虑,作为控制阀而使用降压阀,从而以液压的方式来调节所述控制压力。但是,用之前所提出的很简单的控制阀,能够实现所述调节方法的下面要解释的改进方案,所述改进方案显著地改进了总系统的稳定性,而没有由此增加硬件耗费。
[0012]
能够规定,由所述调节器的调节参量以及预控制参量来查明所述控制阀的调节,其中所述预控制参量至少取决于轴向活塞机的高压。由此,能够将直至达到调整的状态的持续时间降低到最低限度。所述调节的稳定性进一步得到改进。所述控制阀的调节优选通过所述调节器的调节参量和所述预控制参量的总和来查明。
[0013]
能够规定,在所述控制装置中存储了至少一条与第一组合特性曲线不同的第二特性曲线,其中所述第二组合特性曲线作为输入参量至少具有所述轴向活塞机的高压,其中该第二组合特性曲线作为输出参量具有所述预控制参量。所述第一和第二组合特性曲线能够被概括为一条三维的组合特性曲线、也就是被概括为具有多个输出参量的组合特性曲线。相对于此,所述第一和/或第二组合特性曲线优选仅仅具有一个唯一的输出参量。
[0014]
能够规定,所述第二组合特性曲线作为另外的输入参量具有缸筒的转速和/或轴向活塞机的回转角和/或压力流体的粘度。由此,能够使所述预控制参量灵活地与轴向活塞
机的不同的运行条件相适配。
[0015]
不言而喻,前面所提到的以及下面还要解释的特征不仅能够在分别所说明的组合中使用,而且也能够在其它的组合中或者单独地使用,而不离开本发明的范围。
附图说明
[0016]
下面借助于附图对本发明进行详细解释。其中:图1示出了按本发明的轴向活塞机的纵截面;图2示出了按照图1的轴向活塞机的液压的线路图;图3示出了图1的在活塞
‑
缸
‑
单元的区域中的截取部分;图4示出了所述缸筒的纵截面;图5示出了按照图4的缸筒的侧视图;图6示出了所述控制板的立体视图;并且图7示出了按照图1的轴向活塞机的调节的线路图。
具体实施方式
[0017]
图1示出了按本发明的轴向活塞机10的纵截面。所述轴向活塞机10包括壳体40,该壳体在此由第一和第二壳体件41、42所组成。所述第一壳体件41被实施为罐状,其中其敞开的侧被板状的第二壳体件42所覆盖,从而产生一被封闭的内部空间。在所述壳体40中驱动轴33用第一和第二旋转轴承31、32以能关于旋转轴线30旋转的方式受支承。所述第一和第二旋转轴承31、32在此被构造为圆锥滚子轴承。所述驱动轴33以轴颈34从壳体40中伸出来,所述轴颈在此设有花键轴齿部(keilwellenverzahnung)。
[0018]
在所述壳体40的内部,所述驱动轴33被缸筒60所包围,该缸筒通过花键轴齿部(在图4中附图标记66)关于旋转轴线30抗扭转地与所述驱动轴33相连接。所述缸筒60具有沿着旋转轴线30的方向指向的端面63,所述缸筒以该端面贴靠在控制面54上。所述端面63在此是平坦的并且垂直于旋转轴线30来布置。但是,也能够使用关于所述旋转轴线30旋转对称的端面63,该端面比如凹入地弯曲。后一种方案比如对于斜轴结构的轴向活塞机来说是常用的。在所述缸筒60中接纳有多个能线性运动的工作活塞13,所述工作活塞优选均匀分布地围绕着旋转轴线30来布置。所述工作活塞13的运动轴线在此相对于旋转轴线30稍许倾斜地布置。
[0019]
所述控制面54在此布置在单独的控制板50上,其中所述控制面也能够直接地布置在壳体40上。所述控制板50关于旋转轴线30抗扭转地与壳体40相连接,其中该控制板沿着旋转轴线30的方向被支撑在壳体40上。因此,在所述轴向活塞机10运行时在端面63与控制面54之间产生相对旋转,其中在那里构造流体静力的润滑膜。本发明的优点在于,通过这种润滑膜引起的泄漏在所有运行条件下是最小的,其中同时可以观察到最小的磨损。所述轴向活塞机10在此尤其能够用高压和/或高的转速来运行。
[0020]
本轴向活塞机10以斜盘结构来构造,其中本发明也能够运用于斜轴结构的轴向活塞机。所述回转摇架(schwenkwiege)15能够关于垂直于旋转轴线30布置的回转轴线进行回转运动。在此,所述回转轴线与所述旋转轴线30相交,其中所述回转轴线也能够相对于所述旋转轴线30以一定间距来布置。所述工作活塞13分别通过滑座14被支撑在回转摇架15的平
坦的表面上,其中相应的接触面优选在液压方面被卸荷。所述回转摇架的回转角在此能够借助于第一和第二调节缸16、17来调节,所述第一和第二调节缸分别被构造为起单一作用的缸。本轴向活塞机10能够过零调节,也就是说通流方向可以仅仅通过所述回转摇架15的偏转来掉转,而所述缸筒的旋转方向没有改变。但是,本发明也能够运用于以置换容积(verdraengungsvolumen)零为出发点只能朝一个方向调节的轴向活塞机或者运用于其置换容积恒定的轴向活塞机。
[0021]
还要指出所述活塞
‑
缸
‑
单元80,所述缸筒60能够用该活塞
‑
缸
‑
单元限定地以液压的方式压紧到控制面54上,其中关于另外的细节要参照关于图3的解释。
[0022]
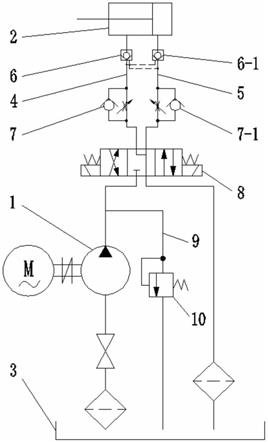
图2示出了按照图1的轴向活塞机10的液压线路图。所述轴向活塞机10具有第一和第二工作接头11、12,所述工作接头在此布置在第二壳体件(在图1中附图标记42)上。所述轴向活塞机10在此具有4象限能力,也就是说它能用驱动轴的两个相反的旋转方向来运行,其中在两种情况中两种相反的通流方向是可能的。所述第一和第二工作接头11、12上的压力在此能够在很大程度上是任意的。因此,所述轴向活塞机10能够交替地作为泵并且作为马达来工作。所述轴向活塞机10的驱动轴与马达12处于旋转驱动连接之中,所述马达能够被实施为电动马达或者被构造为燃烧马达。所述驱动轴的旋转伴随着第一与第二工作接头11、12之间的流体流,倘若所调节的置换容积不等于零的话。
[0023]
所调节的回转角以及间接地所述置换容积在此能够用回转角传感器113来测量。所述压力流体的温度以及间接地其粘度在此能够用温度传感器115来测量,该温度传感器能够连接到所述第一和第二工作接头11、12上。所述驱动轴或者缸筒的转速在此能够用转速传感器114来测量。
[0024]
所述第一和第二工作接头11、12在输入侧连接到换向阀22上。在所述换向阀的输出侧由此加载着所述第一工作接头11上的压力和所述第二工作接头12上的压力中的较高的压力。这个压力在本技术的范围内被称为高压20。该高压在此用作用于向控制阀90供给压力流体的流体源21。在此要说明,作为流体源也能够使用单独的控制油泵。所述高压20在此用第二压力传感器112来测量。
[0025]
所述高压20通过控制阀90被传导至所述控制板50中的两个转交空隙55,所述转交空隙并行地连接到所述控制阀90上。所述控制阀90包括能够连续调节的控制挡板91,该控制挡板的开口横截面能够从零一直调节到预先给定的最大值。所述调节优选以电气的方式至多优选借助于电磁体94来进行,所述电磁体的调节力直接作用到所述调节阀90的阀芯或者阀锥上。所述控制阀90在此借助于弹簧93被预紧到锁止的位置中。该控制阀在此被构造为2/2
‑
方向
‑
比例阀。在控制挡板91的下游加载的压力被称为控制压力85。所述控制压力85在此借助于第一压力传感器111来测量。所有在图2中示出的传感器111、112、113、114、115连接到控制装置92上,其中在那里也连接了所述控制阀90的电磁体94,使得所述控制阀90能够通过所述控制装置92来调节。所述控制装置92实现了下面要参照图7所描述的调节。该控制装置优选包括能编程的数字计算机。
[0026]
图3示出了图1的在所述活塞
‑
缸
‑
单元80的区域中的截取部分。所述活塞
‑
缸
‑
单元80包括第一和第二环形活塞81、82,它们分别被接纳在驱动轴33与缸筒60之间。相应的、优选关于旋转轴线30圆筒形的接触缝隙分别用密封圈86、尤其是o型圈来基本上流体密封地得到密封。所述第一环形活塞81沿着旋转轴线30的方向背向控制面(在图1中附图标记54)
在所述驱动轴33上形状配合地支撑在凸肩上。所述第二环形活塞82沿着旋转轴线30的方向朝着控制面(在图1中附图标记54)通过保险环84被支撑在所述缸筒60上。所述缸筒60、驱动轴33以及第一及第二环形活塞81、82一起限定了流体室84,该流体室除了流体通道65之外基本上流体密封地被封闭。所述缸筒60能够沿着旋转轴线30的方向相对于所述驱动轴33最小程度地运动,使得所述在流体室84中所存在的控制压力85将缸筒60朝控制面(在图1中附图标记54)挤压。相应的反作用力通过所述驱动轴33被支撑在第一旋转轴承(在图1中附图标记31)上。相应地选择了所述相应的圆锥滚子轴承的安装位置,使得所述两个圆锥滚子轴承形成o型布置结构。
[0027]
此外,要指出所述第一及第二环形活塞81、82上的突出部分83。这些突出部分首先如此布置,使得所述第一和第二环形活塞81、82不能覆盖流体通道的孔口68。此外,相应的表面——在该处所述第一和第二环形活塞81、82能够进行接触——相对于所述第一或第二环形活塞81、82的总端面较小地实施。由此,在所述环形活塞81、82的每个位置中保证,所述控制压力85引起缸筒60的、足够大的作用到控制面(在图1中附图标记54)上的足够大的压紧力。
[0028]
图4示出了所述缸筒60的纵截面。可以看出缸孔64,其中所有缸孔64都相同地实施。所述缸孔64具有圆筒形的区段67,所分配的工作活塞(在图1中附图标记13)以能线性运动的并且基本上流体密封的方式被接纳在所述圆筒形的区段中。所述圆筒形的区段能够由单独的、由诸如青铜的滑动轴承材料构成的轴套来形成。所述缸孔64以第一孔口61通向所述端面63。所述第一孔口61的横截面面积能够与所述圆筒形的区段67的横截面面积相同或者稍小一些。在后一种情况中,仅仅通过所述缸孔64中的液压力来引起将缸筒60压紧到控制面(在图1中附图标记54)上的结果。在本发明的范围内,这个力与能够用所述活塞
‑
缸
‑
单元(在图3中附图标记80)获得的力相比不太大,以便能够对相应的压紧力进行有意义的调节。本发明允许特别大的第一孔口61,使得所述轴向活塞机即使在所述缸筒60的转速很高时也没有在吸入区域中形成气穴。
[0029]
在两个相邻的缸孔64之间分别布置了流体通道65,该流体通道如此相对于旋转轴线30倾斜地伸展,使得其一方面以第二孔口62通向端面63,其中该流体通道在对置的端部上以第三孔口68通向流体室(在图3中附图标记84)中。所有流体通道65彼此间相同地构造。所述流体通道笔直地实施,其中其在此被实施为圆筒形的分级孔。形成所述第二孔口62的区段在此具有比另一个区段小的直径。由此,应该能够实现所分配的转交空隙(在图6中附图标记55)的表面的最小化,以便在那里起作用的液压力比所述活塞
‑
缸
‑
单元的力小。
[0030]
所述缸筒60在此被构造为一件式的结构。尤其在所述圆筒形的区段67及端面63的区域中,所述缸筒比如经过表面硬化处理、比如经过渗碳氮化。所述缸筒60比如由钢或者铸铁构成。
[0031]
图5示出了按照图4的缸筒60的侧视图。可以看出所述第一孔口61的有别于圆形的形状。其沿着径向方向的宽度尤其被实施得小于其沿着周边方向的长度。所述第一孔口61尽可能靠近花键轴齿部66来布置,以便在那里特别小的离心力作用到压力流体上。通过这个措施,能够提高所述缸筒60的最大允许的转速。所述第一孔口61限定了基准圆70,该基准圆的中心是旋转轴线30。每个第一孔口61的在径向上处于最外面的点处于这个基准圆70上。所述第二孔口62全部在径向上布置在基准圆70的外部。由此,在所述缸筒60的任何位置
中在所述缸孔64与所述控制压力(在图2中附图标记85)之间都不存在直接的流体连接。换而言之,所述流体连接总是通过能调节的控制挡板(在图2中附图标记91)来进行。
[0032]
在此,总共设置了九个缸孔64,所述缸孔均匀分布地围绕着旋转轴线30来布置。在所有缸孔64之间,在此分别布置了一条具有相应的第二孔口62的流体通道。所有第二孔口相对于旋转轴线30的间距(在图4中附图标记71)都相同地实施。原则上能够考虑,仅仅在一部分缸孔64之间设置流体通道。而后所述转交空隙(在图6中附图标记55)必定在周边的较大的区段的范围内延伸,从而在那里产生较大的液压力,这一点不受欢迎。
[0033]
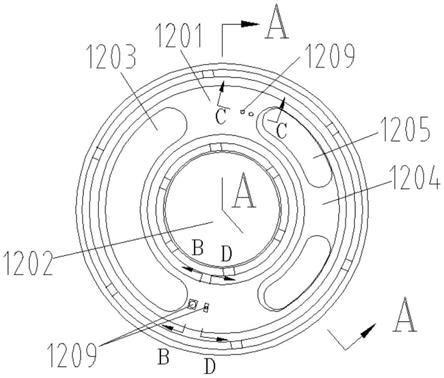
图6示出了所述控制板50的更确切地说从控制面54看的立体视图。所述控制板50基本上被实施为具有恒定的厚度的平板。其在图6中看不出的背侧完全平坦地实施。相对于此,所述控制面54设有里面的环形空隙57、环形槽56和外面的环形空隙58。所述里面的环形空隙57和所述环形槽56限定了以下表面,所述控制面54以所述表面在第一和第二控制空隙51、52的区域中贴靠在缸筒的端面上。这个表面限定了在那里出现的泄漏。该表面如此设计而成,从而在所有运行条件下构成如此厚的流体静力的润滑膜,使得所述端面基本上完全与所述控制面54分开。但是,所提到的润滑膜不应该更厚。
[0034]
所述第一和第二控制空隙51、52分别被构造为圆形地弯曲的长孔,其中相应的圆心由所述旋转轴线30限定。所述控制空隙与缸筒的第一孔口(在图6中附图标记61)对齐地布置。它们能够沿着周边方向在两端上设有缺口53,用所述缺口将在轴向活塞机运行时的压力峰值降低到最低限度。所述第一和第二控制空隙51、52沿着旋转轴线30的方向穿过控制板50。所述控制空隙被构造为镜像对称的结构,因为本轴向活塞机具有4象限能力。
[0035]
在所述环形槽56与所述外面的环形空隙58之间布置了两个转交空隙55。这些转交空隙沿着旋转轴线30的方向穿过控制板50。所述转交空隙分别被构造为圆形地弯曲的长孔,其中相应的圆心由旋转轴线30来限定。所述转交空隙的沿着径向方向的宽度等于第二孔口的相应的宽度(在图4中附图标记72),其中所述转交空隙与这些第二孔口对齐地布置。如此选择了所述转交空隙的沿着周边方向的长度,从而在所述缸筒的每个旋转位置中至少一个第二孔口处于转交空隙55的上面。所述转交空隙的长度比第二孔口的在图5中可见的分隔间距的一半稍大一点。所述两个转交空隙55彼此镜像对称地布置。不言而喻,能够使用每种任意数目的转交空隙55,倘若其沿着周边方向的长度相应地设计而成。
[0036]
所述环形槽56在槽底处设有第二穿孔132,该第二穿孔沿着旋转轴线30的方向穿过控制板50。在那里,在所述环形槽56中所积聚的泄漏量被朝壳体的内部空间引出,以用于在那里进一步通过所述壳体上的泄漏接头被引导到储箱中。所述控制板50的中心中的第一穿孔131被驱动轴(在图1中附图标记33)穿过。
[0037]
图7示出了按照图1的轴向活塞机的调节的线路图。所述相应的调节器100优选是连续的线性的调节器,其中该调节器比如被实施为pi调节器。调节偏差105由额定参量103与实际参量102之间的差来形成。所述实际参量是由第一压力传感器111测量的控制压力。所述额定参量102借助于第一组合特性曲线121来查明。所述第一组合特性曲线的输入参量是用第二压力传感器112来测量的高压,其中所述转速传感器114和/或回转角传感器113和/或温度传感器115的测量值能够用作另外的输入参量。所述第一组合特性曲线121如此设计而成,使得所述调节产生所述缸筒的端面与所述控制面之间的流体静力的润滑膜的基本上恒定的厚度。
[0038]
所述调节器的调节参量101作用到调节阀90上。该调节阀90能够包括唯一的能调节的控制挡板91,因为不可避免的泄漏会引起所述控制压力(在图2中附图标记85)的持续降低,如果没有通过所述控制挡板91的相应的开口克服这种效应的话。
[0039]
已经表明,通过这种特别简单的调节可以实现特别稳定的系统性能。
[0040]
所述调节器100能够通过预控制来得到补充。相应的预控制参量104优选被添加到调节器100的调节参量101上。所述调节参量104能够借助于第二组合特性曲线122来查明。所述第二组合特性曲线122的输入参量能够是所述第二压力传感器112和/或转速传感器114和/或回转角传感器113和/或温度传感器115的测量值。所述第二组合特性曲线(kennfeld)112比如能够通过以下方式来查明,即:一直用所提到的传感器上的恒定的测量值在没有预控制的情况下运行系统,直至恒定的调节参量101达到平均值。而后将这个调节参量用作预控制参量。通过这个措施能够缩短直至达到经过调整的状态的持续时间。
[0041]
附图标记列表:n
ꢀꢀꢀ
缸筒的转速t
ꢀꢀꢀ
压力流体的温度α
ꢀꢀ
回转角10
ꢀꢀ
轴向活塞机11
ꢀꢀ
第一工作接头12
ꢀꢀ
第二工作接头13
ꢀꢀ
工作活塞14
ꢀꢀ
滑座15
ꢀꢀ
回转摇架16
ꢀꢀ
第一调节缸17
ꢀꢀ
第二调节缸20
ꢀꢀ
高压21
ꢀꢀ
流体源22
ꢀꢀ
换向阀23
ꢀꢀ
马达30
ꢀꢀ
旋转轴线31
ꢀꢀ
第一旋转轴承32
ꢀꢀ
第二旋转轴承33
ꢀꢀ
驱动轴34
ꢀꢀ
轴颈40
ꢀꢀ
壳体41
ꢀꢀ
第一壳体件42
ꢀꢀ
第二壳体件50
ꢀꢀ
控制板51
ꢀꢀ
第一控制空隙52
ꢀꢀ
第二控制空隙53
ꢀꢀ
缺口
54
ꢀꢀ
控制面55
ꢀꢀ
转交空隙56
ꢀꢀ
环形槽57
ꢀꢀ
里面的环形空隙58
ꢀꢀ
外面的环形空隙60
ꢀꢀ
缸筒61
ꢀꢀ
第一孔口62
ꢀꢀ
第二孔口63
ꢀꢀ
端面64
ꢀꢀ
缸孔65
ꢀꢀ
流体通道66
ꢀꢀ
花键轴齿部67
ꢀꢀ
缸孔的圆筒形的区段68
ꢀꢀ
第三孔口70
ꢀꢀ
基准圆71
ꢀꢀ
第二孔口相对于旋转轴线的径向间距72
ꢀꢀ
第二孔口的沿着径向方向测量的直径80
ꢀꢀ
活塞
‑
缸
‑
单元81
ꢀꢀ
第一环形活塞82
ꢀꢀ
第二环形活塞83
ꢀꢀ
突出部分84
ꢀꢀ
流体室85
ꢀꢀ
控制压力86
ꢀꢀ
密封圈87
ꢀꢀ
保险环90
ꢀꢀ
控制阀91
ꢀꢀ
控制挡板92
ꢀꢀ
控制装置93
ꢀꢀ
弹簧94
ꢀꢀ
电磁体100 调节器101 调节参量102 实际参量103 额定参量104 预控制参量105 调节偏差111 第一压力传感器112 第二压力传感器113 回转角传感器
114 转速传感器115 温度传感器121 第一组合特性曲线122 第二组合特性曲线131 第一穿孔132 第二穿孔。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。