一种生物试剂板壳体上料装置
【技术领域】
1.本实用新型属于自动上料技术领域,特别是涉及一种生物试剂板壳体上料装置。
背景技术:
2.在目前从事体外快诊检测试剂板生产的生物医疗行业内,试剂板的组装已经开始采用自动化流水线进行生产了,其效率较高,其中试剂板包括壳体、安装在壳体内的试剂条,要实现自动化流水线生产,则壳体的自动供料与上料必不可少。现有技术中,对于壳体的上料一般是采用振动盘输出,然后进入输料流道,再经过传感器或视觉检测其正反位置、前后位置是否正确,通过配备正反翻转机构或前后位置矫正机构来将壳体调整至所需的状态,然后搬运至工装中,进行后续的组装。但此种结构动作较多,机构布置长度较长,空间占用大,效率低;且当更换壳体型号后,正反翻转机构或前后位置矫正机构中用于固定壳体的定位组件都需要进行更换,其兼容性差。
3.因此,需要研发一款生物试剂板壳体上料装置来满足上述需求。
技术实现要素:
4.本实用新型的主要目的在于提供一种生物试剂板壳体上料装置,空间占用小,且噪音低,通用性高,大大提高了上料效率。
5.本实用新型通过如下技术方案实现上述目的:一种生物试剂板壳体上料装置,其包括壳体供料单元、与所述壳体供料单元对接的且将壳体均匀输送摊开的输送单元、位于所述输送单元上方的视觉定位单元、根据所述视觉定位单元获取的壳体位置信息将所述输送单元上的壳体取出的机器人、位于所述机器人下方对壳体拍照识别其正反面的视觉检测单元、将壳体输送出去的壳体输送线、位于所述壳体输送线一端承接住所述机器人上的壳体对其进行180
°
翻转的纠正单元。
6.进一步的,所述壳体供料单元包括料仓、位于所述料仓一侧将所述料仓内的壳体向上提升输送的提升输送机。
7.进一步的,所述料仓为上大下小结构整体呈倒锥梯形,所述提升输送机为所述倒锥梯形的一个锥面。
8.进一步的,所述提升输送机包括第一电机、受所述第一电机驱动进行循环提升的第一输送带、间隔等距离设置在所述第一输送带上的提料挡板。
9.进一步的,所述输送单元包括第二电机、受所述第二电机驱动进行循环输送的第二输送带、位置在所述第二输送带两侧和前端形成一取料区域的围挡板,所述第二输送带的一端与所述提升输送机的输出端对接。
10.进一步的,所述机器人为scara机器人,且活动末端设置有第一吸嘴组件。
11.进一步的,所述纠正单元包括旋转气缸、受所述旋转气缸驱动进行旋转运动的支撑板、固定在所述支撑板上的第二吸嘴组件。
12.进一步的,所述第二吸嘴组件位于所述壳体输送线的正上方。
13.与现有技术相比,本实用新型一种生物试剂板壳体上料装置的有益效果在于:通过采用提升输送机构配合短小的输送单元实现壳体的均匀输出,大大的缩小了设备的整体体积和空间占用,且省去了振动盘,大大的降低了工作环境的噪音;配合机器人和视觉定位系统,大大的提高了壳体抓取移载上料的效率;在输送线的正上方设置一旋转气缸和吸嘴组件,配合机器人实现壳体正反方向的纠正,其结构小巧紧凑,无需额外的占用空间,进一步的减小了空间占用,且提高了壳体上料的效率。
【附图说明】
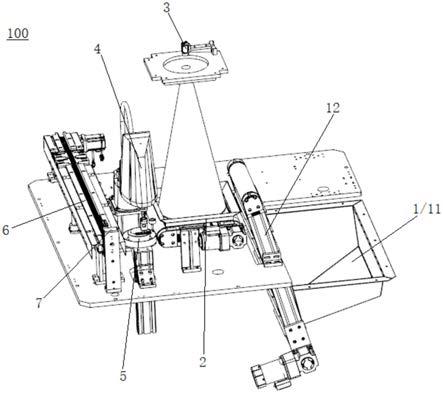
14.图1为本实用新型实施例的结构示意图;
15.图2为本实用新型实施例中壳体供料单元与输送单元的结构示意图;
16.图3为本实用新型实施例中的部分结构示意图;
17.图中数字表示:
18.100生物试剂板壳体上料装置;
19.1壳体供料单元,11料仓,12提升输送机,121第一电机,122第一输送带,123提料挡板,2输送单元,21第二电机,22第二输送带,23围挡板,3视觉定位单元,4机器人,41第一吸嘴组件,5视觉检测单元,6壳体输送线,7纠正单元,71旋转气缸,72支撑板,73第二吸嘴组件。
【具体实施方式】
20.实施例:
21.请参照图1
‑
图3,本实施例一种生物试剂板壳体上料装置100,其包括壳体供料单元1、与壳体供料单元1对接的且将壳体均匀输送摊开的输送单元2、位于输送单元2上方的视觉定位单元3、根据视觉定位单元3获取的壳体位置信息将输送单元2上的壳体取出的机器人4、位于机器人4下方对壳体拍照识别其正反面的视觉检测单元5、将壳体输送出去的壳体输送线6、位于壳体输送线6一端承接住机器人4上的壳体对其进行180
°
翻转矫正其正反面的纠正单元7。
22.壳体供料单元1包括料仓11、位于料仓11一侧将料仓11内的壳体向上提升输送的提升输送机12。料仓11为上大下小结构整体呈倒锥梯形,提升输送机12为所述倒锥梯形的一个锥面。提升输送机12包括第一电机121、受第一电机121驱动进行循环提升的第一输送带122、间隔等距离设置在第一输送带122上的提料挡板123。
23.输送单元2包括第二电机21、受第二电机21驱动进行循环输送的第二输送带22、位置在第二输送带22两侧和前端形成一取料区域的围挡板23,第二输送带22的一端与提升输送机12的输出端对接,被提升输送机12从料仓11内提升起来的壳体在提升输送机12的顶部下落至第二输送带22上。
24.机器人4为scara机器人,且活动末端设置有第一吸嘴组件41。
25.纠正单元7包括旋转气缸71、受旋转气缸71驱动进行旋转运动的支撑板72、固定在支撑板72上的第二吸嘴组件73。
26.第二吸嘴组件73位于壳体输送线6的正上方,当机器人4上吸附的壳体需要调整正反面方向时,则将壳体放置在吸嘴朝上的第二吸嘴组件73上,然后通过旋转气缸71旋转
180
°
后泄气,调整好方向的壳体自动落在壳体输送线6上。
27.本实施例一种生物试剂板壳体上料装置100的动作流程为:散状的若干壳体在料仓11中,通过提升输送机12均匀的提升至输送单元2上,然后进入取料区域,此时,第二输送带22将壳体输送至视觉定位单元3可以拍到的区域后则停止输送,待机器人4根据视觉定位单元3获取的壳体定位信息进行壳体的抓取,在抓取至壳体输送线6的路途中,经过视觉检测单元5上方,通过视觉检测单元5进行正反面的拍照识别,判断是否需要对壳体进行方向调整;若不需要,则机器人4直接吸附壳体放置在壳体输送线6上,若需要调整,则机器人4吸附壳体放置在纠正单元7中的第二吸嘴组件73上,然后翻转180
°
后再放置在壳体输送线6上将其输出。
28.本实施例一种生物试剂板壳体上料装置100,通过采用提升输送机构配合短小的输送单元实现壳体的均匀输出,大大的缩小了设备的整体体积和空间占用,且省去了振动盘,大大的降低了工作环境的噪音;配合机器人和视觉定位系统,大大的提高了壳体抓取移载上料的效率;在输送线的正上方设置一旋转气缸和吸嘴组件,配合机器人实现壳体正反方向的纠正,其结构小巧紧凑,无需额外的占用空间,进一步的减小了空间占用,且提高了壳体上料的效率。
29.以上所述的仅是本实用新型的一些实施方式。对于本领域的普通技术人员来说,在不脱离本实用新型创造构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

