1.本发明属于贝类铲耙设备领域,具体涉及一种水底贝类铲耙机。
背景技术:
2.在海水、湖水底泥沙中蕴藏着大量的贝类。由于没有相适应的捕捞设备(工具),渔船捕捞时,在深水水底泥沙中,水面渔船推进器很难实现所需推力或拖力;而一般渔网也很难在水底150mm左右厚的泥沙中捕捞贝类,特别是在深水水域捕捞贝类的区域,一直是个难题。为了解决这一难题,本发明提供了一种水底贝类铲耙机,可在0.3m
‑
3.0m的水里铲耙贝类。
技术实现要素:
3.本发明的目的在于提供一种水底贝类铲耙机,可在水里铲耙贝类。
4.为实现上述目的,本发明采用的技术方案是:水底贝类铲耙机,其特征在于包括贝类耙捞装置、水底推进装置、浮动平台3
‑
1、立柱3
‑
2;浮动平台3
‑
1由立柱3
‑
2固定在水底推进装置的履带底盘2
‑
1上;
5.所述贝类耙捞装置包括耙齿1
‑
1、耙齿座1
‑
2、左耙齿座立柱1
‑
3、耙齿座横梁1
‑
4、网袋1
‑
5、网袋架1
‑
6、网袋升降下摆杆1
‑
7、下摆杆液压升降器1
‑
10、网袋后支架1
‑
12、卸料液压升降器1
‑
13、缷料门1
‑
14、储料筐1
‑
15、右耙齿座立柱1
‑
17、连杆1
‑
19;耙齿座1
‑
2上固定有多个耙齿1
‑
1,相邻耙齿之间的缝隙为4
‑
8mm;左耙齿座立柱1
‑
3的下端与耙齿座1
‑
2的左端部固定,右耙齿座立柱1
‑
17的下端与耙齿座1
‑
2的右端部固定,左耙齿座立柱1
‑
3的上端部与右耙齿座立柱1
‑
17的上端部由耙齿座横梁1
‑
4固定连接,左耙齿座立柱1
‑
3、耙齿座横梁1
‑
4、右耙齿座立柱1
‑
17和耙齿座1
‑
2围成网袋前进口1
‑
18;网袋架1
‑
6的前端部与耙齿座横梁1
‑
4固定连接,网袋架1
‑
6的后端部下面固定连接有网袋后支架1
‑
12,网袋后支架1
‑
12处设有缷料门1
‑
14,缷料门1
‑
14的上端部与网袋后支架1
‑
12铰接,网袋1
‑
5的左上端部与网袋架1
‑
6的左端固定连接,网袋1
‑
5的右上端部与网袋架1
‑
6的右端固定连接,网袋1
‑
5的前端部与左耙齿座立柱1
‑
3、耙齿座1
‑
2和右耙齿座立柱1
‑
17固定连接,网袋1
‑
5的后端部与网袋后支架1
‑
12固定连接;缷料门1
‑
14的前侧设有卸料液压升降器1
‑
13,卸料液压升降器1
‑
13的一端与网袋架1
‑
6铰接,卸料液压升降器1
‑
13的另一端与缷料门1
‑
14铰接;
6.储料筐1
‑
15固定安装在水底推进装置的履带底盘2
‑
1的前部;连杆1
‑
19、网袋升降下摆杆1
‑
7、下摆杆液压升降器1
‑
10分别为2个;履带底盘2
‑
1的前端部左侧、右侧分别铰接安装有下摆杆液压升降器1
‑
10;左侧的下摆杆液压升降器1
‑
10的活塞杆与左侧的网袋升降下摆杆1
‑
7的一端部铰接,左侧的网袋升降下摆杆1
‑
7的另一端部与左耙齿座立柱1
‑
3的下端部铰接,左侧的网袋升降下摆杆1
‑
7的后部与水底推进装置的履带底盘2
‑
1的前端部铰接;左侧的连杆1
‑
19的一端部与网袋架1
‑
6的前部左侧铰接,左侧的连杆1
‑
19的另一端部与水底推进装置的履带底盘2
‑
1的前端部铰接;右侧的下摆杆液压升降器1
‑
10的活塞杆与右侧的网袋升降下摆杆1
‑
7的一端部铰接,右侧的网袋升降下摆杆1
‑
7的另一端部与右耙齿座
立柱1
‑
17的下端部铰接,右侧的网袋升降下摆杆1
‑
7的后部与水底推进装置的履带底盘2
‑
1的前端部铰接;右侧的连杆1
‑
19的一端部与网袋架1
‑
6的前部右侧铰接,右侧的连杆1
‑
19的另一端部与水底推进装置的履带底盘2
‑
1的前端部铰接。
7.按照上述技术方案,所述水底推进装置为履带式行走装置,包括履带底盘2
‑
1、后履带轮2
‑
2、前履带轮、履带2
‑
3、履带液压马达2
‑
4、后轴、前轴、主动履带轮;左侧的后履带轮2
‑
2由轴承安装在后轴的左端部上,右侧的后履带轮2
‑
2由轴承安装在后轴的右端部上,后轴安装在履带底盘2
‑
1的后部;左侧的前履带轮由轴承安装在前轴的左端部上,右侧的前履带轮由轴承安装在前轴的右端部上,前轴安装在履带底盘2
‑
1的前部;左侧的履带2
‑
3套在左侧的后履带轮2
‑
2、左侧的前履带轮和左侧的主动履带轮上,左侧的主动履带轮安装在左侧的履带液压马达2
‑
4的输出轴上,左侧的履带液压马达2
‑
4安装在履带底盘2
‑
1上;右侧的履带2
‑
3套在右侧的后履带轮2
‑
2、右侧的前履带轮和右侧的主动履带轮上,右侧的主动履带轮安装在右侧的履带液压马达2
‑
4的输出轴上,右侧的履带液压马达2
‑
4安装在履带底盘2
‑
1上。
8.按照上述技术方案,所述立柱3
‑
2为4根。
9.按照上述技术方案,所述多个耙齿为20
‑
200个耙齿。
10.按照上述技术方案,所述浮动平台3
‑
1的底部左侧、右侧各固定安装有一个水位传感器套管3
‑
7,水位传感器套管3
‑
7内设有水位传感器3
‑
8,水位传感器3
‑
8由数据线与控制电路相连,控制电路安装在操控平台3
‑
4内,操控平台3
‑
4设在浮动平台3
‑
1上。
11.按照上述技术方案,所述耙齿1
‑
1:直径φ为4
‑
8mm、长400
‑
500mm、前端40mm处应打磨成2mm尖齿;作业时,耙齿1
‑
1插入水底砂中垂直深度为60
‑
150mm。
12.按照上述技术方案,所述耙齿座1
‑
2:全长0.8
‑
4m、厚4
‑
6mm、宽50
‑
60mm。
13.按照上述技术方案,所述左耙齿座立柱1
‑
3、右耙齿座立柱1
‑
17:长300mm、宽50mm;左耙齿座立柱1
‑
3、右耙齿座立柱1
‑
17与耙齿1
‑
1成120
°‑
110
°
角。
14.按照上述技术方案,所述耙齿座横梁1
‑
4是用直径φ30
‑
50mm钢管,耙齿座横梁1
‑
4与耙齿座1
‑
2长度相等。
15.按照上述技术方案,所述网袋架1
‑
6的长度为1
‑
1.5m;网袋1
‑
5的深度为300mm;网袋后支架1
‑
12的深度为300mm;网袋升降下摆杆1
‑
7是直径φ为30
‑
40mm钢管制成。
16.按照上述技术方案,耙齿1
‑
1插入砂中与砂平面成25
°‑
30
°
角。
17.按照上述技术方案,水底贝类铲耙机的作业范围水深在0.3m
‑
3.0m。
18.本发明的有益效果在于:可在0.3m
‑
3.0m的水里铲耙贝类,生产效率高(如用1600mm宽的耙齿座,作业50米/分钟行走速度计,每小时耙捞面积达4800m2)。
附图说明
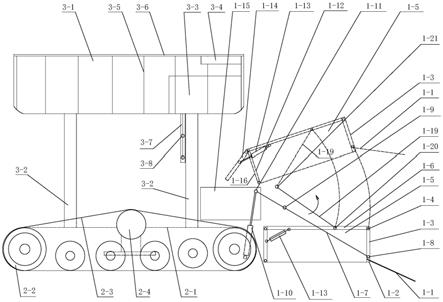
19.图1为本发明水底贝类铲耙机的结构示意图。
20.图2为图1中耙齿和耙齿座的右视图。
21.图中:1
‑
1耙齿,1
‑
2耙齿座,1
‑
3左耙齿座立柱,1
‑
4耙齿座横梁,1
‑
5网袋,1
‑
6网袋架,1
‑
7网袋升降下摆杆,1
‑
8下摆杆第一支点,1
‑
9下摆杆第二支点,1
‑
10下摆杆液压升降器,1
‑
11下摆杆液压升降器支点,1
‑
12网袋后支架,1
‑
13卸料液压升降器,1
‑
14缷料门,1
‑
15储料筐,1
‑
16网袋后出口,1
‑
17右耙齿座立柱,1
‑
18网袋前进口,1
‑
19连杆,1
‑
20连杆第一铰
接点,1
‑
21连杆第二铰接点;
[0022]2‑
1履带底盘,2
‑
2后履带轮,2
‑
3履带,2
‑
4履带液压马达;
[0023]3‑
1浮动平台,3
‑
2立柱,3
‑
3动力室,3
‑
4操控平台,3
‑
5扶栏,3
‑
6扶手,3
‑
7水位传感器套管,3
‑
8水位传感器。
具体实施方式
[0024]
下面结合附图详细说明本发明的优选实施例。
[0025]
如图1、图2所示,水底贝类铲耙机,包括贝类耙捞装置、水底推进装置、浮动平台3
‑
1、立柱3
‑
2;浮动平台3
‑
1由立柱3
‑
2固定在水底推进装置的履带底盘2
‑
1上(立柱可为多根,如3
‑
12根,本实施例中立柱为4根);
[0026]
所述贝类耙捞装置包括耙齿1
‑
1、耙齿座1
‑
2、左耙齿座立柱1
‑
3、耙齿座横梁1
‑
4、网袋1
‑
5、网袋架1
‑
6、网袋升降下摆杆1
‑
7、下摆杆液压升降器1
‑
10、网袋后支架1
‑
12、卸料液压升降器1
‑
13、缷料门1
‑
14、储料筐1
‑
15、右耙齿座立柱1
‑
17、连杆1
‑
19;耙齿座1
‑
2上固定有多个耙齿1
‑
1(多个耙齿为20
‑
200个耙齿),相邻耙齿之间的缝隙为4
‑
8mm;左耙齿座立柱1
‑
3的下端与耙齿座1
‑
2的左端部固定(为了描述方便,定义图1中右边为前、左边为后,图2中左边为左、右边为右),右耙齿座立柱1
‑
17的下端与耙齿座1
‑
2的右端部固定,左耙齿座立柱1
‑
3的上端部与右耙齿座立柱1
‑
17的上端部由耙齿座横梁1
‑
4固定连接,左耙齿座立柱1
‑
3、耙齿座横梁1
‑
4、右耙齿座立柱1
‑
17和耙齿座1
‑
2围成网袋前进口1
‑
18(砂和贝类等物由此网袋前进口1
‑
18进入网袋1
‑
5中);网袋架1
‑
6的前端部与耙齿座横梁1
‑
4固定连接,网袋架1
‑
6的后端部下面固定连接有网袋后支架1
‑
12(网袋后支架成u形或半圆形),网袋后支架1
‑
12处设有缷料门1
‑
14,缷料门1
‑
14的上端部与网袋后支架1
‑
12铰接(即缷料门1
‑
14的下端为自由端,缷料门1
‑
14可打开),网袋1
‑
5的左上端部与网袋架1
‑
6的左端固定连接,网袋1
‑
5的右上端部与网袋架1
‑
6的右端固定连接(即网袋1
‑
5近似u形),网袋1
‑
5的前端部与左耙齿座立柱1
‑
3、耙齿座1
‑
2和右耙齿座立柱1
‑
17固定连接,网袋1
‑
5的后端部(即网袋后出口1
‑
16)与网袋后支架1
‑
12固定连接;缷料门1
‑
14的前侧设有卸料液压升降器(即液压缸)1
‑
13,卸料液压升降器1
‑
13的一端与网袋架1
‑
6铰接(液压缸的缸体与网袋架铰接),卸料液压升降器1
‑
13的另一端与缷料门1
‑
14铰接(液压缸的活塞杆与缷料门铰接;卸料液压升降器1
‑
13可为2个,左右布置);
[0027]
储料筐1
‑
15固定安装在水底推进装置的履带底盘2
‑
1的前部;连杆1
‑
19、网袋升降下摆杆1
‑
7、下摆杆液压升降器1
‑
10分别为2个;履带底盘2
‑
1的前端部左侧、右侧分别铰接安装有下摆杆液压升降器(即液压缸)1
‑
10;左侧的下摆杆液压升降器1
‑
10的活塞杆由左侧的下摆杆液压升降器支点(铰接点)1
‑
11与左侧的网袋升降下摆杆(即下摆杆)1
‑
7的一端部铰接,左侧的网袋升降下摆杆1
‑
7的另一端部由左侧的下摆杆第一支点(铰接点)1
‑
8与左耙齿座立柱1
‑
3的下端部铰接,左侧的网袋升降下摆杆1
‑
7的后部由左侧的下摆杆第二支点(铰接点)1
‑
9与水底推进装置的履带底盘2
‑
1的前端部铰接(图1中未画出,也可设铰接支架铰接,下摆杆第二支点1
‑
9为支撑点);左侧的连杆1
‑
19的一端部由左侧的连杆第一铰接点1
‑
20与网袋架1
‑
6的前部左侧铰接,左侧的连杆1
‑
19的另一端部由左侧的连杆第二铰接点1
‑
21与水底推进装置的履带底盘2
‑
1的前端部铰接(图1中未画出,也可设铰接支架铰接);右侧的下摆杆液压升降器1
‑
10的活塞杆由右侧的下摆杆液压升降器支点(铰接点)1
‑
11与
右侧的网袋升降下摆杆(即下摆杆)1
‑
7的一端部铰接,右侧的网袋升降下摆杆1
‑
7的另一端部由右侧的下摆杆第一支点(铰接点)1
‑
8与右耙齿座立柱1
‑
17的下端部铰接,右侧的网袋升降下摆杆1
‑
7的后部由右侧的下摆杆第二支点(铰接点)1
‑
9与水底推进装置的履带底盘2
‑
1的前端部铰接(图1中未画出,也可设铰接支架铰接);右侧的连杆1
‑
19的一端部由右侧的连杆第一铰接点1
‑
20与网袋架1
‑
6的前部右侧铰接,右侧的连杆1
‑
19的另一端部由右侧的连杆第二铰接点1
‑
21与水底推进装置的履带底盘2
‑
1的前端部铰接(图1中未画出,也可设铰接支架铰接)(摆杆液压升降器1
‑
10的活塞杆缩回,网袋1
‑
5上升,网袋1
‑
5的网袋后出口1
‑
16位于储料筐1
‑
15的上方,如图1中的虚线所示;摆杆液压升降器1
‑
10的活塞杆伸出,网袋1
‑
5下降);
[0028]
所述水底推进装置为履带式行走装置,包括履带底盘2
‑
1、后履带轮2
‑
2、前履带轮、履带2
‑
3、履带液压马达(低速液压驱动马达,或称液压马达)2
‑
4、后轴、前轴、主动履带轮;左侧的后履带轮2
‑
2由轴承安装在后轴的左端部上(即左侧的后履带轮2
‑
2可旋转),右侧的后履带轮2
‑
2由轴承安装在后轴的右端部上,后轴安装在履带底盘2
‑
1的后部(后轴也可由轴承安装在履带底盘2
‑
1的后部);左侧的前履带轮由轴承安装在前轴的左端部上,右侧的前履带轮由轴承安装在前轴的右端部上,前轴安装在履带底盘2
‑
1的前部(即前轴也可旋转);左侧的履带2
‑
3套在左侧的后履带轮2
‑
2、左侧的前履带轮和左侧的主动履带轮上(左侧的主动履带轮带动左侧的履带运动),左侧的主动履带轮安装在左侧的履带液压马达2
‑
4的输出轴上,左侧的履带液压马达2
‑
4安装在履带底盘2
‑
1上;右侧的履带2
‑
3套在右侧的后履带轮2
‑
2、右侧的前履带轮和右侧的主动履带轮上(右侧的主动履带轮带动右侧的履带运动),右侧的主动履带轮安装在右侧的履带液压马达2
‑
4的输出轴上,右侧的履带液压马达2
‑
4安装在履带底盘2
‑
1上。
[0029]
所述浮动平台3
‑
1的底部左侧、右侧各固定安装有一个水位传感器套管3
‑
7,水位传感器套管3
‑
7内设有水位传感器3
‑
8,水位传感器3
‑
8由数据线与控制电路相连,控制电路安装在操控平台3
‑
4内,操控平台3
‑
4设在浮动平台3
‑
1上。
[0030]
所述浮动平台3
‑
1内设有动力室3
‑
3(动力室设置液压站,由油管与液压升降器、液压马达相连,人操控平台上进行操作,也可采用无线遥控进行操作;可由柴汽油机、蓄电池提供动力源。网袋所处工作位、缷料位,可在履带底盘2
‑
1上设位置传感器)。
[0031]
所述耙齿1
‑
1:直径φ为4
‑
8mm、长400
‑
500mm、前端40mm处应打磨成2mm尖齿。作业时,耙齿1
‑
1插入水底砂中垂直深度为60
‑
150mm。本实施例采用均匀分布90
‑
130根耙齿1
‑
1,在耙齿座1
‑
2的全长上分布焊合。
[0032]
所述耙齿座1
‑
2:全长0.8
‑
4m、厚4
‑
6mm、宽50
‑
60mm。
[0033]
所述左耙齿座立柱1
‑
3、右耙齿座立柱1
‑
17:长300mm、宽50mm。左耙齿座立柱1
‑
3、右耙齿座立柱1
‑
17与耙齿1
‑
1成120
°‑
110
°
角。
[0034]
所述耙齿座横梁1
‑
4是用直径φ30
‑
50mm钢管,耙齿座横梁1
‑
4与耙齿座1
‑
2长度相等。
[0035]
所述网袋架1
‑
6的长度为1
‑
1.5m。
[0036]
网袋1
‑
5的深度为300mm;网袋1
‑
5是用15
‑
20目的渔网挂接在网袋架1
‑
6上,组成网袋1
‑
5。在作业时,网袋1
‑
5与水底砂面平行距离为20
‑
50mm。
[0037]
网袋后支架1
‑
12的深度为300mm。
[0038]
网袋升降下摆杆1
‑
7是直径φ为30
‑
40mm钢管制成。
[0039]
下摆杆液压升降器1
‑
10的升降带动水底贝类耙捞装置的卸料位置和角度。
[0040]
在作业时,缷料门1
‑
14处于闭合状态,当贝类耙捞装置上升到卸料状态时,操控卸料液压升降器1
‑
13推进,使缷料门1
‑
14开启卸料至储料筐1
‑
15中,完成卸料后,卸料液压升降器1
‑
13收回,使缷料门1
‑
14闭合卸料完成,下摆杆液压升降器1
‑
10下降贝类耙捞装置,下降到耙捞作业状态。在作业时,多个耙齿1
‑
1插入砂中(耙齿1
‑
1插入砂中与砂平面成25
°‑
30
°
角),长约200
‑
300mm垂直,深60
‑
150mm中由水底推进装置推动,由于耙齿中砂子与贝类受到前面砂子与贝类向后的不断推挤作用,使后面的砂子、贝类逐渐向后面的网袋1
‑
5中迁移。另由于水的不断逐渐冲洗作用,使耙齿上、网袋1
‑
5内的砂子被水冲洗过滤掉,网袋1
‑
5内所剩的只有贝类。这一过程是在水底自动完成的。
[0041]
履带液压马达(即液压马达)2
‑
6驱动履带2
‑
5,以40
‑
50米/分的速度,推动(或拖动)贝类耙捞装置作业。
[0042]
在动力室3
‑
3中用于安装动力,输出源为柴油机、汽油机和液压泵(液压站)、或可用电作动力源。
[0043]
本发明的耙齿做1
‑
2长1m
‑
1.2m,其耙齿为90
‑
130根。它的履带底盘长2m
‑
2.8m、宽1.8m
‑
2.2m,它是使用浮动平台(或称:水上平台),由四根长3.5m的立柱下端与履带底盘相连上端托连水面平台可在水深0.3
‑
3m的水域区域作业。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

