1.本实用新型是一种鼢鼠无损双向捕获装置,属于鼢鼠捕获技术领域。
背景技术:
2.鼢鼠是啮齿目仓鼠科鼢鼠亚科的通称,又名地羊,塞隆,体形像普通老鼠,头大而扁,视觉极不发达;背毛银灰色而略带淡赭色;体型粗壮,体长15~27厘米;吻钝,门齿粗大;四肢短粗有力,前足爪特别发达 ,大于相应的指长,尤以第三趾最长,是挖掘洞道的有力工具;眼小,几乎隐于毛内,视觉差,有瞎鼠之称;耳壳仅绕耳孔很小皮褶;尾短,略长于后足,被稀疏毛或裸露;毛色从灰色、灰褐色到红色。
3.目前研究鼢鼠的手段单一,基础研究不足,严重影响了鼢鼠的防治策略以及生物多样性保护策略,这与缺乏有效的活捕技术有很大的关系,传统的鼢鼠捕捉以弓箭法、鼠夹法和使用化学灭鼠剂和生物毒素等为主,这些方法只能静态的研究鼢鼠,局限性较大,目前,主要捕获活鼠的方式为人工挖堵截,不仅费时费力,工作效率低,而且无法根据鼢鼠的体重进行捕获适合试验研究的鼢鼠。
技术实现要素:
4.本实用新型的目的在于提供一种鼢鼠无损双向捕获装置,能够根据鼢鼠的体重,捕获合适试验研究的活鼢鼠,不仅能够降低工作人员的劳动强度,提高捕获效率,而且捕获过程中对鼢鼠没有损伤。
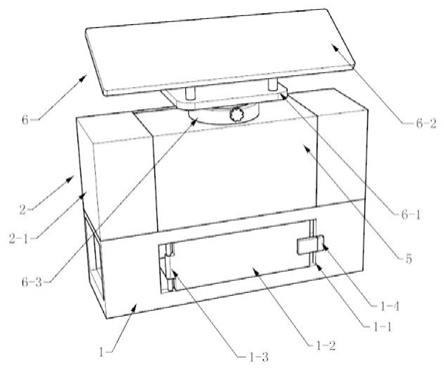
5.本实用新型采用的技术方案如下:一种鼢鼠无损双向捕获装置,包括捕获箱、控制系统、供电系统,所述捕获箱为两端开口的中空结构,所述捕获箱的前端设有箱门,所述捕获箱的两个开口部分别设有电控门,所述电控门包括安装在捕获箱上端的门箱,所述门箱的内上部通过复位弹簧连接有可上下滑动且能封闭捕获箱的拦截门,所述拦截门的内侧端设有永磁体,所述门箱内部设有呈上下分布的第一电磁铁和第二电磁铁,其中,第一电磁铁位于第二电磁铁上方,永磁体位于第一电磁铁和第二电磁铁之间,永磁体与第一电磁铁之间的相对端为同名磁极,永磁体与第二电磁铁之间的相对端为异名磁极,复位弹簧为自由状态时,拦截门为开启状态;所述捕获箱的内底部设有用于控制电控门的电控开关,所述供电系统、控制系统、第一电磁铁、第二电磁铁、电控开关电性连接。
6.优选的,所述捕获箱的前端设有安装口,所述安装口位置安装箱门,其中,箱门的一端与安装口可转动连接,箱门的另一端与安装口可拆卸固定连接,箱门为透明结构,且箱门与安装口之间具有间隙。
7.优选的,所述拦截门的上端设有多个等距分布的盲孔,所述复位弹簧固定在盲孔内部,且复位弹簧的上端延伸出盲孔并与门箱的内上部固定连接。
8.优选的,所述电控开关包括重力传感器,所述重力传感器的上端固定有与捕获箱内底部尺寸相等的受力板,所述重力传感器镶嵌安装在捕获箱的内底端中部位置,且重力传感器的上端延伸出捕获箱的内底部,所述受力板与捕获箱之间具有间隙。
9.优选的,所述控制系统包括主控制器,所述主控制器连接有继电器,所述继电器与第一电磁铁和第二电磁铁构成串联电路;所述供电系统由太阳能发电装置和蓄电池电性连接组成,所述捕获箱的上端中部位置安装有放置箱,所述主控制器、继电器、蓄电池均安装在放置箱的内部,所述太阳能发电装置安装在放置箱的上端。
10.进一步,所述太阳能发电装置包括安装架,所述安装架的上端设有呈倾斜分布的太阳能电池板,所述安装架的底部设有能带动安装架转动定位的转动定位装置,所述转动定位装置包括固定在放置箱上端的底座,所述底座的上端开有圆孔,所述圆孔的内部通过连接轴承安装有可转动的安装座,所述底座的侧端开有与圆孔连通的螺纹孔,所述螺纹孔啮合有与其适配且能紧压安装座的锁紧螺栓,其中,螺纹孔的数量为两个且呈对称分部,所述安装座的上端与安装架固定连接。
11.本实用新型的有益效果在于:
12.本实用新型通过设有捕获箱、电控门、电控开关、控制系统、供电系统,当鼢鼠进入捕获箱后,受力板受到鼢鼠的重力并将重力传到重力传感器上,重力传感器监测到鼢鼠的重力,重力传感器向主控制器发送信号,主控制器接收到信号后,主控制器向继电器发送信号,继电器连通控制第一电磁铁和第二电磁铁的电路,由于永磁体位于第一电磁铁和第二电磁铁之间,永磁体与第一电磁铁之间的相对端为同名磁极,永磁体与第二电磁铁之间的相对端为异名磁极,第一电磁铁和第二电磁铁通电后,第一电磁铁与永磁体之间产生排斥力,第二电磁铁与永磁体之间产生吸引力,使得永磁体能带动拦截门向下运动,使得拦截门为关闭状态,复位弹簧被拉伸,即实现鼢鼠的无损捕获,鼢鼠在进洞过程中或出洞过程中实现对鼢鼠的捕获不仅能够降低工作人员的劳动强度,提高捕获效率,而且捕获过程中对鼢鼠没有损伤,另外,如果有其他野生动物被误捕后,也不会损伤其他野生动物。
13.本实用新型通过设有两端开口中空结构的捕获箱,捕获箱的两个开口部分别设有电控门,使得鼢鼠在进洞过程中或出洞过程中实现对鼢鼠的捕获,进而提高鼢鼠的捕获效率。
14.本实用新型能够通过设置重力传感器重力变化值的大小,捕获不同体重的鼢鼠,工作人员能够根据不同体重的鼢鼠进行试验研究,提高试验研究的准确性。
15.本实用新型通过设有可转动定位的太阳能电池板,能够调节太阳能电池板的方向,提高太阳能电池板的发电效率。
附图说明
16.图1为本新型立体结构示意图。
17.图2为本新型主视剖面结构示意图。
18.图3为本新型太阳能发电装置爆炸结构示意图。
19.图4为本新型太阳能发电装置侧视剖面结构示意图。
20.图5为本新型拦截门立体结构示意图。
21.图中:捕获箱1、安装口1
‑
1、箱门1
‑
2、铰接件1
‑
3、机械锁1
‑
4、电控门2、门箱2
‑
1、复位弹簧2
‑
2、拦截门2
‑
3、盲孔2
‑
31、永磁体2
‑
4、第一电磁铁2
‑
5、第二电磁铁2
‑
6、电控开关3、重力传感器3
‑
1、受力板3
‑
2、控制系统4、主控制器4
‑
1、继电器4
‑
2、放置箱5、太阳能发电装置6、安装架6
‑
1、太阳能电池板6
‑
2、转动定位装置6
‑
3、底座6
‑
31、圆孔6
‑
32、连接轴承6
‑
33、
安装座6
‑
34、螺纹孔6
‑
35、锁紧螺栓6
‑
36、蓄电池7。
具体实施方式
22.为了使本领域的技术人员更好地理解本实用新型的技术方案,下面将结合附图对本实用新型作进一步的详细介绍,以下所述,仅用以说明本实用新型的技术方案而非限制。
23.在本实用新型的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
24.如图1
‑
5所示,所述的一种鼢鼠无损双向捕获装置,包括捕获箱1、控制系统4、供电系统,所述捕获箱1为两端开口的中空结构,所述捕获箱1的前端安装有箱门1
‑
2,所述捕获箱1的两个开口部分别安装有电控门2,所述电控门2包括通过紧固螺栓固定在捕获箱1上端的门箱2
‑
1,所述门箱2
‑
1的内上部通过复位弹簧2
‑
2安装有可上下滑动且能封闭捕获箱1的拦截门2
‑
3,所述拦截门2
‑
3的内侧端固定有永磁体2
‑
4,所述门箱2
‑
1内部固定有呈上下分布的第一电磁铁2
‑
5和第二电磁铁2
‑
6,其中,第一电磁铁2
‑
5位于第二电磁铁2
‑
6上方,永磁体2
‑
4位于第一电磁铁2
‑
5和第二电磁铁2
‑
6之间,永磁体2
‑
4与第一电磁铁2
‑
5之间的相对端为同名磁极,永磁体2
‑
4与第二电磁铁2
‑
6之间的相对端为异名磁极,复位弹簧2
‑
2为自由状态时,拦截门2
‑
3为开启状态;所述捕获箱1的内底部安装有用于控制电控门2的电控开关3,所述供电系统、控制系统4、第一电磁铁2
‑
5、第二电磁铁2
‑
6、电控开关3电性连接。
25.在本实施例中,所述捕获箱1的前端开有安装口1
‑
1,所述安装口1
‑
1位置安装箱门1
‑
2,其中,箱门1
‑
2的一端通过铰接件1
‑
3与安装口1
‑
1可转动连接,箱门1
‑
2的另一端通过机械锁1
‑
4与安装口1
‑
1可拆卸固定连接,箱门1
‑
2为透明结构,且箱门1
‑
2与安装口1
‑
1之间具有间隙。
26.在本实施例中,所述拦截门2
‑
3的上端设有多个等距分布的盲孔2
‑
31,所述复位弹簧2
‑
2固定在盲孔2
‑
31内部,且复位弹簧2
‑
2的上端延伸出盲孔2
‑
31并与门箱2
‑
1的内上部固定连接。
27.在本实施例中,所述电控开关3包括重力传感器3
‑
1,所述重力传感器3
‑
1的上端固定有与捕获箱1内底部尺寸相等的受力板3
‑
2,所述重力传感器3
‑
1镶嵌安装在捕获箱1的内底端中部位置,且重力传感器3
‑
1的上端延伸出捕获箱1的内底部,所述受力板3
‑
2与捕获箱1之间具有间隙。
28.在本实施例中,所述控制系统4包括主控制器4
‑
1,所述主控制器4
‑
1连接有继电器4
‑
2,所述继电器4
‑
2与第一电磁铁2
‑
5和第二电磁铁2
‑
6构成串联电路;所述供电系统由太阳能发电装置6和蓄电池7电性连接组成,所述捕获箱1的上端中部位置固定安装有放置箱5,所述主控制器4
‑
1、继电器4
‑
2、蓄电池7均固定安装在放置箱5的内部,所述太阳能发电装置6安装在放置箱5的上端。
29.进一步,所述太阳能发电装置6包括安装架6
‑
1,所述安装架6
‑
1的上端固定有呈倾斜分布的太阳能电池板6
‑
2,所述安装架6
‑
1的底部设有能带动安装架6
‑
1转动定位的转动定位装置6
‑
3,所述转动定位装置6
‑
3包括固定在放置箱5上端的底座6
‑
31,所述底座6
‑
31的
上端开有圆孔6
‑
32,所述圆孔6
‑
32的内部通过连接轴承6
‑
33安装有可转动的安装座6
‑
34,所述底座6
‑
31的侧端开有与圆孔6
‑
32连通的螺纹孔6
‑
35,所述螺纹孔6
‑
35啮合有与其适配且能紧压安装座6
‑
34的锁紧螺栓6
‑
36,其中,螺纹孔6
‑
35的数量为两个且呈对称分部,所述安装座6
‑
34的上端与安装架6
‑
1固定连接。
30.本实用新型的工作原理和使用方法:
31.使用时,将捕获箱1放置在鼢鼠的洞口位置,且捕获箱1的其中一个开口和空口对应,鼢鼠在进洞过程中或出洞过程中实现对鼢鼠的捕获。
32.当鼢鼠进入捕获箱1后,受力板3
‑
2受到鼢鼠的重力并将重力传到重力传感器3
‑
1上,重力传感器3
‑
1监测到鼢鼠的重力,重力传感器3
‑
1向主控制器4
‑
1发送信号,主控制器4
‑
1接收到信号后,主控制器4
‑
1向继电器4
‑
2发送信号,继电器4
‑
2连通控制第一电磁铁2
‑
5和第二电磁铁2
‑
6的电路,由于永磁体2
‑
4位于第一电磁铁2
‑
5和第二电磁铁2
‑
6之间,永磁体2
‑
4与第一电磁铁2
‑
5之间的相对端为同名磁极,永磁体2
‑
4与第二电磁铁2
‑
6之间的相对端为异名磁极,第一电磁铁2
‑
5和第二电磁铁2
‑
6通电后,第一电磁铁2
‑
5与永磁体2
‑
4之间产生排斥力,第二电磁铁2
‑
6与永磁体2
‑
4之间产生吸引力,使得永磁体2
‑
4能带动拦截门2
‑
3向下运动,使得拦截门2
‑
3为关闭状态,复位弹簧2
‑
2被拉伸,即实现鼢鼠的无损捕获,捕获后的鼢鼠通过打开箱门1
‑
2取出,重力传感器3
‑
1监测到的重量竖直变为初始状态,继电器4
‑
2断开控制第一电磁铁2
‑
5和第二电磁铁2
‑
6的电路,第一电磁铁2
‑
5和第二电磁铁2
‑
6为断电状态,此时复位弹簧2
‑
2恢复,拦截门2
‑
3开启状态,进行下次捕获。
33.尽管参照前述实例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行和修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

