1.本技术涉及桥梁施工的技术领域,尤其是涉及一种现浇箱梁移动模板。
背景技术:
2.现浇箱梁是桥梁工程中梁的一种,现浇箱梁是在施工场地直接对模板进行组装,然后向组装好的模板中加入钢筋笼,再向组装好的模板中浇筑水泥混凝土,最终形成现浇箱梁。
3.在相关技术中,如公告号为cn210712509u的中国实用新型专利公开了一种现浇箱梁移动模板,包括固定座,所述固定座上部设有滑块且滑块顶部设有千斤顶,所述千斤顶通过螺栓与滑块固定且千斤顶的动力输出端设有垫板,所述垫板上部设有内模且内模与垫板之间通过螺栓固定,所述内模两侧设有活动轴且活动轴下部设有活动杆,所述滑块两侧设有液压器且液压器的动力输出端设有驱动杆,所述驱动杆与活动杆之间固接且活动杆通过驱动杆与内模之间转动连接,所述固定座上部设有滑轨,所述滑轨两侧设有第一滑槽且顶部设有第二滑槽,所述滑块内两侧设有第一导轮且第一导轮与第一滑槽之间相互嵌合,所述滑块内顶部设有第二导轮且第二导轮与第二滑槽之间相互嵌合。该现浇箱梁移动模板通过在滑块两侧设置液压器对驱动杆驱动,驱动杆带动活动杆转动,且通过千斤顶控制内模的上下移动,使内模可以快速脱离内模腔,方便进行脱模。
4.针对上述中的相关技术,发明人认为在使用该现浇箱梁移动模板对现浇箱梁进行浇筑时,待现浇箱梁成型后,需要对外模板进行脱模,由于外模板的体积较大,进而存在有不便于工作人员将外模板与成型后的现浇箱梁分离的缺陷。
技术实现要素:
5.为了缓解工作人员不便于将外模板与成型后的现浇箱梁分离的问题,本技术提供一种现浇箱梁移动模板。
6.本技术提供的一种现浇箱梁移动模板采用如下的技术方案:
7.一种现浇箱梁移动模板,包括第一外模板和第二外模板,所述第一外模板和第二外模板相互靠近的一端可拆卸连接,所述第一外模板和第二外模板的底部设置有第一轨道,所述第一外模板和第二外模板均与第一轨道滑动连接,并第一外模板和第二外模板与第一轨道的滑动方向为第一外模板和第二外模板相互靠近或远离的方向,所述第一轨道长度方向平行于第一外模板和第二外模板相互靠近或远离的方向设置。
8.通过采用上述技术方案,在现浇箱梁成型后,将第一外模板和第二外模板之间解锁,然后对第一外模板和第二外模板朝向相互远离的方向进行驱动,继而使得第一外模板和第二外模板与第一轨道发生相对滑动并朝向相互远离的方向运动,从而使得第一外模板和第二外模板与成型的现浇箱梁分离,进而达到方便工作人员将第一外模板和第二外模板与成型后的现浇箱梁分离的效果。
9.可选的,所述第一外模板靠近第二外模板的一端设置有连接管,所述第二外模板
靠近第一外模板的一端设置有连接杆,所述连接管和连接杆的长度方向均平行于第一轨道的长度方向设置,并所述连接杆和连接管同轴套接。
10.通过采用上述技术方案,将第一外模板和第二外模板连接在一起后,连接管与连接杆同轴套接在一起,继而增加在向第一外模板和第二外模板中浇筑混凝土时,第一外模板和第二外模板之间的连接稳定性,减少混凝土经第一外模板和第二外模板之间的间隙处流出的情况发生,进而达到节约混凝土的效果。
11.可选的,所述连接管上设置第一锁止件,所述第一锁止件用于对连接管和连接杆发生相对滑动进行锁止。
12.通过采用上述技术方案,将第一外模板和第二外模板连接在一起后,操作第一锁止件,使得第一锁止件将连接管和连接杆进行锁止,继而减少连接管和连接杆之间的运动,从而增加浇筑混凝土时,第一外模板和第二外模板的稳定性。
13.可选的,所述第一锁止件为锁止螺栓,所述锁止螺栓远离螺栓头的一端螺纹穿入连接管中,并所述锁止螺栓远离螺栓头的一端与连接杆抵触。
14.通过采用上述技术方案,对第一外模板和第二外模板进行组装时,将第一外模板和第二外模板朝向相互靠近的方向进行驱动,继而使得第二外模板上的连接杆插入连接管中,当第一外模板和第二外模板相对的端面抵触时,拧松锁止螺栓,锁止螺栓远离螺栓头的一端螺纹穿入连接管中并与连接杆抵触,进而实现对连接管和连接杆之间的锁止,增加向第一外模板和第二外模板中浇筑混凝土时,第一外模板和第二外模板之间的连接稳定性。
15.可选的,所述第一外模板和第二外模板朝向第一轨道的侧面上均设置有支架,所述支架上设置有多个支座,多个所述支座与支架螺纹转动连接,且多个所述支座远离支架的一端均与第一轨道抵触。
16.通过采用上述技术方案,在对第一外模板和第二外模板进行组装时,先将第一外模板和第二外模板朝向相互靠近的方向进行驱动,继而使得第二外模板上的连接杆插入连接管中,然后拧动锁止螺栓,使得锁止螺栓远离螺栓头的一端与连接杆抵触,再转动支座,支座与支架发生相对转动,从而使得支座远离支架的一端与第一轨道抵触并使得第一外模板和第二外模板与第一轨道分离,进而增加向第一外模板和第二外模板进行浇筑混凝土时,第一外模板和第二外模板的稳定性,减少第一外模板和第二外模板与第一轨道发生相对运动的情况发生。
17.可选的,所述支架上设置有多个支腿,每个所述支腿远离支架的一端均设置有第一滚轮,所述第一滚轮的转动轴线垂直于第一轨道设置,并所述第一滚轮与第一轨道滚动连接。
18.通过采用上述技术方案,在对第一外模板和第二外模板进行组装时,将第一外模板和第二外模板朝向相互靠近的方向进行驱动,继而使得第一外模板和第二外模板带动第一滚轮运动,从而使得第一滚轮与第一轨道发生相对滚动,进而减小第一外模板和第二外模板与第一轨道之间的摩擦力,最终达到方便工作人员对第一外模板和第二外模板进行驱动的效果。
19.可选的,每个所述支腿均与支架铰接,并每个所述支腿上均设置有用于锁止支腿与支架发生相对转动的第二锁止件;所述支架与第一轨道之间设置有第二轨道,所述第二轨道和第一轨道垂直固定连接,所述支架上设置有第二滚轮,所述第二滚轮的转动轴线垂
直于第二轨道的长度方向设置,且所述第二滚轮与第二轨道滚动连接。
20.通过采用上述技术方案,在现浇箱梁定型后,先拧动锁止螺栓,锁止螺栓与连接杆分离,再对第一支座进行操作,继而使得第一滚轮与第一轨道抵触,朝向相互远离的方向驱动第一外模板和第二外模板,从而使得第一滚轮与第一轨道发生相对滚动,同时第一外模板和第二外模板朝向相互远离的方向运动,再操作支座,支座使得第一滚轮与第一轨道分离,再将第二锁止件进行解锁,转动支腿,支腿带动第一滚轮与第一轨道分离,反向操作支座,支座使得第二滚轮与第二轨道抵触,再对第一外模板和第二外模板朝向下一浇筑点进行驱动,同时第二滚轮与第二轨道发生相对滚动,最终达到方便工作人员对第一外模板和第二外模板进行移动的效果。
21.可选的,所述第二锁止件为插杆,所述插杆的一端穿过支腿和支架。
22.通过采用上述技术方案,在对支腿进行转动时,先将插杆从支腿和支架中拔出,然后再转动支腿,将支腿转动指定位置时,再将插杆插入支腿和支架中,从而实现支腿和支架之间的锁止,进而方便工作人员对支腿和支架进行锁止的效果。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.通过设置第一外模板、第二外模板和第一轨道,第一外模板和第二外模板可拆卸连接并均与第一轨道滑动连接,可以便于工作人员将第一外模板和第二外模板与定型的现浇箱梁分离;
25.2.通过设置连接管和连接杆,在第一外模板和第二外模板相对的端面抵触时,连接杆插入连接管中,进而增加第一外模板和第二外模板的连接稳定性;
26.3.通过设置锁止螺栓,在第一外模板和第二外模板相对端面抵触后,连接杆正好插入连接管中,拧动锁止螺栓,锁止螺栓远离螺栓头的一端螺纹穿入连接管中并与连接杆抵触,进而实现连接杆与连接管之间的锁止。
附图说明
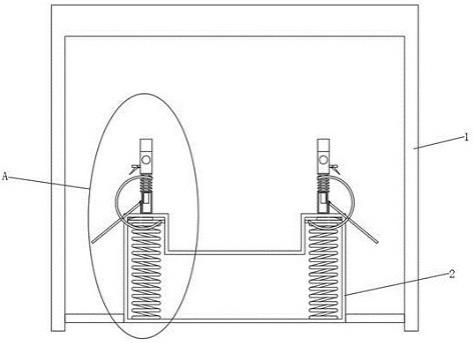
27.图1是本技术现浇箱梁移动模板的结构示意图;
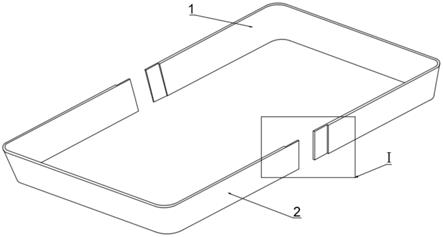
28.图2是本技术现浇箱梁移动模板另一视角示意图,主要示出插杆和支架的连接关系;
29.图3是图2中a部位的放大图。
30.附图标记说明:100、第一外模板;110、连接管;111、锁止螺栓;120、支架;121、支座;122、第二滚轮;123、支撑杆;124、支撑板;130、支腿;131、第一滚轮;132、插杆;200、第二外模板;210、连接杆;300、第一轨道;400、第二轨道。
具体实施方式
31.以下结合附图1
‑
3对本技术作进一步详细说明。
32.本技术实施例公开一种现浇箱梁移动模板。
33.参照图1,一种现浇箱梁移动模板包括第一外模板100和第二外模板200,第一外模板100和第二外模板200互相平行设置,并第一外模板100和第二外模板200相互靠近的一端可拆卸连接。
34.参照图1,第一外模板100和第二外模板200的底部布置有多根第一轨道300,多根
第一轨道300共面布置,并多根第一轨道300平行间隔布置。第一外模板100和第二外模板200沿相互靠近或远离的方向与多根第一轨道300滑动连接,且多根第一轨道300的长度方向平行于第一外模板100和第二外模板200的滑动方向布置。
35.参照图1,第一外模板100靠近第二外模板200的一端固定多根连接管110,多根连接管110均匀间隔布置,并多根连接管110的长度方向均平行于第一轨道300设置。第二外模板200靠近第一外模板100的一端固定连接有多根连接杆210,多根连接杆210的长度方向均平行于第一轨道300设置。在第一外模板100和第二外模板200相对的端面抵触时,一根连接杆210插入一根连接管110中。
36.参照图1和图2,为了增加第一外模板100和第二外模板200连接的稳定性,每根连接管110上均设置有第一锁止件。第一锁止件为锁止螺栓111,锁止螺栓111远离螺栓头的一端与连接管110螺纹连接。在连接杆210插入连接管110中后,拧动锁止螺栓111,锁止螺栓111远离螺栓头的一端垂直螺纹穿入连接管110中并与连接杆210抵触,进而实现连接管110和连接杆210的锁止。
37.需要第一外模板100和第二外模板200与定型好的现浇箱梁分离时,拧动锁止螺栓111,锁止螺栓111与连接杆210分离,然后对第一外模板100和第二外模板200进行驱动,使得第一外模板100和第二外模板200朝向相互远离的方向运动,同时第一外模板100和第二外模板200沿第一轨道300运动,进而实现第一外模板100和第二外模板200与现浇箱梁的分离。
38.参照图1,第一轨道300朝向第一外模板100和第二外模板200的一侧布置有多根第二轨道400,多根第二轨道400共面布置,且多根第二轨道400间隔布置,并每根第二轨道400均与第二轨道400垂直固定连接。第一外模板100和第二外模板200均与第二轨道400滑动连接,其滑动的方向为第二轨道400的长度方向。将第一外模板100和第二外模板200与现浇箱梁分离后,对第一外模板100和第二外模板200进行驱动,继而使得第一外模板100和第二外模板200沿着第二轨道400运动,进而使得第一外模板100和第二外模板200运动至下一工位。
39.参照图1和图2,为了便于工作人员将定型后的现浇箱梁与第一外模板100和第二外模板200分离,第一外模板100和第二外模板200朝向第一轨道300的侧面上均固定连接有支架120,每个支架120上安装有多个支座121。多个支座121分为两排设置,第一外模板100对应的一排支座121布置在第一外模板100的一侧,第一外模板100对应的另一排支座121布置在第一外模板100的另一侧。第二外模板200对应的一排支座121布置在第二外模板200的一侧,第二外模板200对应的另一排支座121布置在第二外模板200的另一侧。
40.参照图1,为了方便工作人员对支座121进行转动,每个支座121包括支撑杆123和支撑板124,支撑杆123与垂直设置,并支撑杆123的一端与支撑板124转动连接。每个支撑杆123远离支撑板124的一端与支架120螺纹转动连接,在支座121对第一外模板100或第二外模板200进行支撑时,每个支撑板124与第一轨道300抵触。
41.在将第一外模板100和第二外模板200与定型好的现浇箱梁进行分离时,转动支撑杆123,支撑杆123与支架120发生相对转动,同时支撑杆123与支撑板124发生相对转动,继而使得第一外模板100和第二外模板200朝向靠近第一轨道300的方向运动,进而实现第一外模板100和第二外模板200与成型后的现浇箱梁分离的效果。
42.参照图1和图2,每个支架120上均布置有多个支腿130,多个支腿130分为两排布置,第一外模板100对应的一排支腿130布置在第一外模板100的一侧,第一外模板100对应的另一排支腿130布置在第一外模板100的另一侧。第二外模板200对应的一排支腿130布置在第二外模板200的一侧,第二外模板200对应的另一排支腿130布置在第二外模板200的另一侧。
43.参照图2和图3,每个支腿130均与支架120铰接,且每个支腿130远离支架120的一端均铰接有第一滚轮131,支腿130与支架120的转动轴线和第一滚轮131与支腿130的铰接轴线均平行于第二轨道400的长度方向布置。每个支腿130上均布置有第二锁止件,第二锁止件为插杆132,当支腿130与第一轨道300垂直时,第一滚轮131与第一轨道300抵触,并插杆132的一端穿过支腿130和支架120;当第一滚轮131与第一轨道300分离,支腿130与第一轨道300之间的夹角为30度时,插杆132的一端穿过支腿130和支架120,一方面增加第一滚轮131与第一轨道300发生相对滚动时的稳定性,另一方面减少第一外模板100和第二外模板200沿着第二轨道400运动时,第一滚动轮对第一外模板100和第二外模板200运动时的影响。
44.参照图1和图2,两个支座121朝向第二轨道400的侧面上均铰接有多个第二滚轮122,所有的第二滚轮122分为多排布置,并第二滚轮122与支座121的转动轴线垂直于第二轨道400的长度方向布置。在支撑板124与第一轨道300分离后和第一滚轮131与第一轨道300分离后,一排第二滚轮122与一根第二轨道400抵触。对第一外模板100和第二外模板200施加平行于第二轨道400长度方向的力时,第二滚轮122与第二轨道400发生相对滚动并使得第一外模板100和第二外模板200沿第二轨道400运动。
45.本技术实施例一种现浇箱梁移动模板的实施原理为:在将第一外模板100和第二外模板200与成型的现浇箱梁分离时,先转动锁止螺栓111,锁止螺栓111与连接管110发生相对转动,继而使得锁止螺栓111远离螺栓头的一端与连接杆210分离。然后将插杆132拔出,使得插杆132与支腿130和支架120分离,然后支腿130与支架120发生相对转动。当支腿130与第一轨道300垂直时,将插杆132的一端穿过支腿130和支座121,从而实现支腿130与支座121之间的锁止。
46.再转动支撑杆123,支撑杆123与支座121发生相对转动,同时支腿130与支撑板124发生相对转动,从而使得第一外模板100和第二外模板200朝向靠近第一轨道300的方向运动,进而使得第一外模板100和第二外模板200与现浇箱梁分离。随着支撑杆123的不断转动,第一滚轮131与第一轨道300抵触,继续转动支撑杆123,支撑杆123带动支撑板124朝向靠近支架120的方向运动,使得支撑板124与第一轨道300完全分离。
47.在对第一外模板100和第二外模板200朝向相互远离的方向进行驱动,继而使得第一外模板100和第二外模板200朝向相互远离的方向运动,同时第一滚轮131与第一轨道300发生相对运动。连接管110与连接杆210发生相对滑动,当连接管110与连接杆210完全分离后和第二滚轮122运动至第二轨道400的正上方后,停止对第一外模板100和第二外模板200进行驱动。
48.转动支撑杆123,支撑杆123与支架120发生相对转动,继而使得支撑板124朝向第一轨道300所在的方向运动,从而使得支撑板124与第一轨道300抵触并使得第一滚轮131与第一轨道300分离。将插杆132拔出,插杆132与支腿130和支座121分离,转动支腿130,支腿
130与第一轨道300为30度时,再将插杆132的一端穿过支腿130和支座121,实现支腿130和支座121的锁止。
49.再反向转动支撑杆123,支撑杆123与支架120发生相对转动,继而使得第一外模板100和第二外模板200朝向靠近第一轨道300的方向运动,从而使得第二滚轮122与第二轨道400接触,继续转动支撑杆123,使得支撑板124与第一轨道300分离。再对第一外模板100和第二外模板200朝向平行于第二轨道400长度方向的力,第一外模板100和第二外模板200沿第二轨道400运动,第二滚轮122与第二轨道400发生相对滚动,进而使得第一外模板100和第二外模板200运动至下一工位。
50.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。