1.本实用新型涉及清扫车领域,尤其涉及一种手扶电动树叶清扫车。
背景技术:
2.目前市面上清理树叶的机器分两款,一款是吸,动力来源是柴油机,噪音大;一款是清扫车,因前面集尘胶板阻碍,导致树叶堆积,清扫效果差,或者垃圾箱小,需要频繁倾倒垃圾,且清扫车体型大,不能清扫小区、步行街等场所。
3.如公开号为cn201720809089.5的一种手推式电动树叶清扫车,该清扫车就可以满足在不同清扫环境对大小树叶的清扫要求。
技术实现要素:
4.本实用新型公开一种手扶电动树叶清扫车,扫地机行走、清扫均由锂电池提供动力,采用履带式垃圾输送系统,垃圾箱利用率100%;可适应不同的清扫环境及大小树叶;同时大大提高了清扫效果,具有操作简单的优点。
5.为实现上述技术效果,本技术公开了一种手扶电动树叶清扫车,包括车体,车体后侧设有扶手和手握操纵杆,所述手握操纵杆连接驱动装置的开启和关闭,所述驱动装置通过锂电池供电;所述车体后部设有用于控制和操作的大尺寸控制面板及按键;还设有抽拉袋盒以及设置于所述抽拉袋盒下部的自动打包装置和垃圾箱。
6.进一步的,所述车体的外壳由多块能够打开的部分组成。
7.进一步的,所述车体内还设有喷雾控制系统,用于向地面喷水;以及用于除尘的吸尘排气过滤装置。
8.进一步的,车体后轮安装于车架上,所述前轮通过差速桥驱动。
9.进一步的,车体内设有边刷驱动及调节机构以及滚刷驱动及调节机构,用于实现对边刷和滚刷的驱动及高度、角度的调节。
10.进一步的,所述车体内还设有前集尘胶板升降装置实现对前集尘胶板的升降控制;通过履带式垃圾输送系统的设置,实现垃圾的清理和输送。
11.进一步的,还设有压实装置与所述自动打包装置相配合。
12.本实用新型的有益效果包括:
13.本实用新型公开的清扫车行走、清扫均由锂电池提供动力,采用履带式垃圾输送系统,垃圾箱利用率100%;特有的边刷驱动调节机构、前集尘胶板升降装置、滚刷驱动调节机构,可适应不同的清扫环境及大小树叶;该清扫车还安装了喷雾系统、吸尘排气过滤装置,大大提高了清扫效果;并设计了压实装置、自动打包装置,减少垃圾倾倒次数的同时,倾倒垃圾更方便快捷;前轮由差速桥驱动,运行平稳有劲,且带有电子刹车功能,坡路不溜车;后轮可360
°
转向,实现原地转向,机动灵活;手握操纵杆控制,握紧行走,松手停止;大尺寸控制面板及按键,操作简单;流线型外壳简单、美观、大方。
附图说明
14.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。显而易见,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
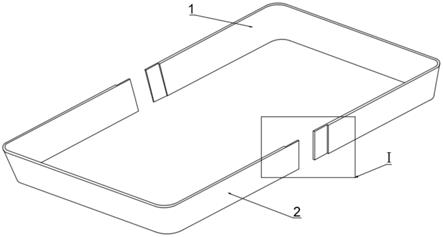
15.图1为本实用新型的后部结构示意图。
16.图2为本实用新型的前部结构示意图。
17.图3为本实用新型的外壳示意图。
18.图4为本实用新型图3外壳的a位置放大图。
19.图5为本实用新型图3外壳的b位置放大图。
20.图6为本实用新型图3外壳的c向位置放大图。
21.图7为本实用新型图3外壳的d向位置放大图。
22.图8为本实用新型的大尺寸控制面板示意图。
23.图9为本实用新型的内部结构示意图。
24.图10为本实用新型的边刷驱动及调节机构示意图。
25.图11为本实用新型的边刷角度调节示意图。
26.图12为本实用新型的滚刷驱动及调节机构示意图。
27.图13为本实用新型的前集尘胶板升降装置示意图。
28.图14为本实用新型的驱动装置示意图。
29.图15为本实用新型的履带式垃圾输送装置示意图。
30.图16为本实用新型的后部示意图。
31.图17为本实用新型的后部局部示意图。
32.图18为本实用新型的压实装置压实状态示意图。
33.图19为本实用新型的压实装置复位状态示意图。
34.图20为本实用新型的自动打包装置复位状态示意图。
35.图21为本实用新型的自动打包装置打包状态示意图。
具体实施方式
36.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
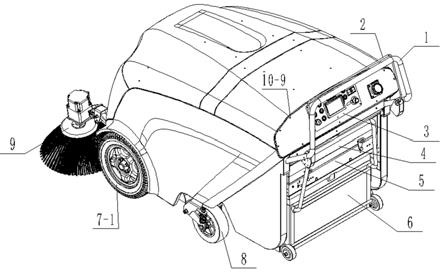
37.如图1和2所示的一种手扶电动树叶清扫车,包括车体,车体后侧设有扶手1和手握操纵杆2,所述手握操纵杆连接驱动装置7的开启和关闭,所述驱动装置通过锂电池11供电;如图8所示所述车体后部设有用于控制和操作的大尺寸控制面板3和按键;该手扶式电动树叶清扫车具体操作如下:
38.打开控制面板上3的钥匙开关后,旋转调速旋钮调整速度,前推/后拉前进/后退拨杆,手握操纵杆2、扶手1操纵前进及后退功能,松开操纵杆2停止行走;
39.控制面板3上模式一按钮:输送带12
‑
1旋转工作、滚刷19
‑
1边旋转边下降至设定好的工作高度、边刷9边旋转边下降至设定好的工作高度,清扫宽度等于两侧边刷清扫宽度;
40.控制面板3上模式二按钮:输送带12
‑
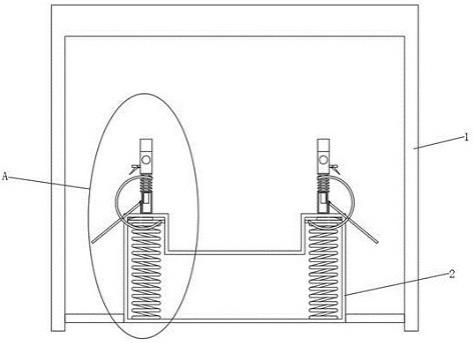
1工作旋转工作、滚刷19
‑
1边旋转边下降至设定好的工作高度,边刷9不工作,清扫宽度等于滚刷的长度,适用于灰尘较重的场所;
41.控制面板3上左侧船型开关有大树叶小树叶两个选择项:可以控制前集尘胶板升降装置17,调节前集尘胶板17
‑
1的高度,有效清扫不同落叶;
42.控制面板3上水泵按钮:可以控制喷雾系统13,根据灰尘多少、落叶干湿程度选择开启与否;
43.控制面板3上风机按钮:可以控制吸尘排气过滤装置工作14,扫吸结合,提高清扫效率;同时可以抽拉袋盒4中的垃圾袋,使之与垃圾箱6内壁贴合;
44.控制面板3上摄像头按钮:可以观察垃圾箱内垃圾的高度;
45.控制面板3上右侧船型开关往压实方向摁下:可以控制压实装置15下降,将落叶等垃圾进行压缩,提高垃圾箱的的利用率;往复位方向摁下,压实装置15提升至最顶端;
46.控制面板3上打包按钮:可以控制打包装置5,实现垃圾袋的封口、切断;
47.还设有抽拉袋盒4以及设置于所述抽拉袋盒下部的自动打包装置5和垃圾箱6。
48.如图3
‑
7所示,所述车体的外壳10由多块能够打开的部分组成。该手扶式电动树叶清扫车的外壳10包括10
‑
1上前盖、10
‑
2上中盖、10
‑
3上后盖、10
‑
4前盖、10
‑
5左右侧盖、10
‑
6后控制面板盖;外壳10通过多个支撑10
‑
7固定在车架18上。上前盖10
‑
1、上后盖10
‑
3与上中盖10
‑
2分别通过两组铰链合页10
‑
8连接在一起。握住上前盖10
‑
1上的把手10
‑1‑
1可将上前盖10
‑
1抬起,左右两侧气弹簧10
‑
10可确保上前盖10
‑
1保持上掀状态;上前盖10
‑
1开启后,可以给水箱13
‑
1加水,也可对风机14
‑
1、锂电池11、垃圾输送系统12进行维护保养。松开10
‑
3上后盖与10
‑
6后控制面板盖的连接螺栓10
‑
9后,可以将10
‑
3上后盖掀起,对控制面板3上的元件、压实装置15进行维护保养,也对过滤网14
‑
2进行更换、清理。
49.所述车体内还设有喷雾控制系统13,用于向地面喷水;以及用于除尘的吸尘排气过滤装置14。如图9所示,喷雾系统主要组成包含安装在车架上的左右水箱13
‑
1、左右喷头13
‑
2、水泵13
‑
3,打开水泵13
‑
3通电后将左右水箱13
‑
1中的水吸出,通过左右喷头13
‑
2喷洒到地面上,左右喷头13
‑
2角度上下左右可调。
50.吸尘排气过滤装置14主要包含风机14
‑
1、伸缩管14
‑
3、过滤器14
‑
2,风机密封罩14
‑
4右吸气口14
‑
5通过伸缩管14
‑
3与过滤器密封罩14
‑
6出气口连接,风机14
‑
1启动后可将垃圾箱6内的粉尘气体强制吸起,经过过滤器14
‑
2过滤后排出。
51.后轮8安装在车架18上,可360
°
转向,减震弹簧10
‑
2可减缓整机震动。
52.如图14,车体后轮8安装于车架18上,所述前轮7
‑
1通过差速桥7
‑
2驱动。整机动力由差速桥7
‑
2提供,运行平稳有劲。差速桥7
‑
2由左右两侧的支撑7
‑
3固定在车架18上,差速桥7
‑
2上的无刷电机运转带动链轮7
‑
4、链条7
‑
5、大链轮7
‑
6旋转,从而带动左右前轮7
‑
1往前行走,左右前轮7
‑
1通过螺栓组件7
‑
7与大链轮7
‑
6固定在一起,惰轮7
‑
8起到涨紧轮的作用。
53.如图10
‑
图12,车体内设有边刷驱动及调节机构16以及滚刷驱动及调节机构19,用于实现对边刷9和滚刷的驱动和高度及角度的调节。边刷驱动及调节机构16包含推拉升降器16
‑
1、边刷整体支架16
‑
3、平型支架16
‑
5、前限位支架16
‑
6、边刷电机16
‑
8。边刷9旋转动
力由边刷电机16
‑
8提供;边刷整体支架16
‑
3通过平型支架16
‑
5固定在车架18上,推拉升降器16
‑
1通电后,带动钢丝绳16
‑
2和提升交接棒16
‑
4控制边刷整体支架16
‑
3的升降;通过调节前限位支架16
‑
6上的限位螺栓16
‑
7,可以调节边刷9的离地高度;通过调节固定螺栓16
‑
9在长条孔16
‑
10中的位置,调节边刷的角度;滚刷驱动及调节机构19通过左右两侧的固定角铁19
‑
13固定在车架18上。滚刷电机19
‑
3通电后依次带动皮带轮19
‑
4、皮带19
‑
7、皮带轮19
‑
5、皮带19
‑
8、皮带轮19
‑
6、旋转轴19
‑
2旋转,最终带动滚刷19
‑
1旋转工作,涨紧轮19
‑
17可以撑紧两根皮带。推杆电机19
‑
9控制滚刷19
‑
1的升降;气弹簧19
‑
10可保证主刷在旋转工作时的稳定性;调节限位螺栓19
‑
11可以调整滚刷19
‑
1的离地高度。
54.如图13所述车体内还设有前集尘板升降装置17实现对前集尘胶板的升降控制;如图15,通过履带式垃圾输送系统12的设置,实现垃圾的清理和输送。前集尘胶板升降装置17安装在收集箱焊件19
‑
12的前端,前集尘胶板17
‑
1安装在滑动支撑17
‑
2上,推杆电机17
‑
4通电后通过螺栓17
‑
3带动滑动支撑17
‑
2、前集尘胶板17
‑
1升降。收集箱焊件19
‑
12的下端装有右胶板19
‑
15、左胶板19
‑
14、后胶板19
‑
16与前集尘胶板17
‑
1形成密闭空间,避免滚刷19
‑
1工作时带起的粉尘外溢。履带式垃圾输送系统12通过左右两侧的固定板12
‑
12、12
‑
13固定在车架18上,输送带12
‑
1套在输送带支架12
‑
8上,电机12
‑
3用支撑板12
‑
14固定在车架18上,电机12
‑
3转动,带动带轮12
‑
7、同步带12
‑
5、带轮12
‑
6旋转,从而带动输送带支架12
‑
8上端的滚筒12
‑
10旋转,从而带动输送带12
‑
1旋转;输送带12
‑
1旋转将滚刷19
‑
1扫入集尘槽12
‑
11中的垃圾提升,提升到最上端后抛入垃圾箱6内,使垃圾箱利用率达到100%;输送带12
‑
1四周由防护罩焊件12
‑
2罩住,避免垃圾在输送过程中外溢;涨紧轮12
‑
4可保证同步带12
‑
5处于最合适的工作状态;调整螺栓12
‑
15可调整输送带的松紧。
55.如图16,还设有压实装置15与所述自动打包装置5相配合。自动打包装置5通过支撑5
‑
1安装在车架18上,袋盒4放置在其上方,可以抽拉出来更换垃圾袋,工作时将袋盒4推到底,向上旋转打包装置5上的压板5
‑
2,可将袋盒4固定在打包装置5的上方。
56.垃圾箱6推到车架18后方,下压扶手使滑动轮6
‑
3抬起落到车架轨道18
‑
1上,推到底,垃圾箱6上的网孔与负压箱20
‑
1上的进气口对齐靠实,将搭扣6
‑
2挂到挂槽5
‑
3上,将垃圾箱6固定在清扫车上。
57.如图17,负压箱20
‑
1的出气端20
‑
2通过伸缩管与风机密封罩14
‑
4左吸气口14
‑
5连接,风机14
‑
1工作时,将垃圾箱6内的空气吸出,强大的吸力可以将垃圾袋从袋盒4中抽拉出来,与垃圾箱6内壁贴合。
58.压实装置15安装在过滤网14
‑
2下部,主要组件包含推杆电机15
‑
1、支架15
‑
2、连杆组件15
‑
3、压网组件15
‑
4。连杆组件15
‑
3c、d端分别与支架15
‑
2、压网组件15
‑
4固定,a/b端可以在长条孔内滑动。压实状态:推杆电机的推杆15
‑1‑
1从a1点往a2点滑动,连杆组件15
‑
3逐渐伸直,压网组件15
‑
4下移,下移过程将树叶压实。复位状态:推杆电机的推杆15
‑1‑
1从a2点往a1点滑动,连杆组件15
‑
3逐渐收缩,压网组件15
‑
4上移复位。
59.如图20/21,自动打包装置5主要组件有外壳焊件5
‑
4、2台减速电机5
‑
5电机轴上装有同步带轮、同步带5
‑
6、5
‑
7、2个从动同步带轮5
‑
20、光轴5
‑
13、5
‑
14、5
‑
15、直线轴承组件5
‑
8、5
‑
9、5
‑
10下端与同步带固定在一起,直线轴承组件5
‑
11、感应开关5
‑
16、5
‑
17、5
‑
18、5
‑
19、加热体5
‑
21、耐高温胶条5
‑
22、防护罩5
‑
12。
60.打包时:减速电机5
‑
5带动同步带5
‑
6、5
‑
7旋转,直线轴承组件5
‑
8、5
‑
9、5
‑
10、5
‑
11
沿光轴5
‑
13、5
‑
14、5
‑
15滑动,短拉杆5
‑8‑
2、5
‑9‑
1与长拉杆5
‑
10
‑
2将垃圾袋往中间收拢,感应锤5
‑8‑
1接近感应开关5
‑
18,感应锤5
‑
10
‑
1接近感应开关5
‑
17时,耐高温胶条5
‑
22将垃圾袋挤到加热体5
‑
21上电机停止运转,程序控制加热体5
‑
21上的扁丝、圆丝顺序加热,实现垃圾袋上下封口、中间切断。
61.复位时:垃圾袋打包完成,程序控制减速电机5
‑
5反转,直线轴承组件5
‑
8、5
‑
9、5
‑
10、5
‑
11沿光轴5
‑
13、5
‑
14、5
‑
15反向滑动,感应锤5
‑8‑
1接近感应开关5
‑
16,感应锤5
‑
10
‑
1接近感应开关5
‑
19时,减速电机5
‑
5停止转动,完成复位。
62.以上所述的实施例仅仅是对本实用新型的优选实施方式进行描述,并非对本实用新型的范围进行限定,在不脱离本实用新型精神的前提下,本领域普通技术人员对本实用新型的技术方案作出的各种变形和改进,均应落入本实用新型权利要求书确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。