1.本发明涉及桥梁钢塔施工技术领域,尤其涉及一种桥塔施工方法。
背景技术:
2.经过钢塔安装方法多年的发展,已经发展出了多种类型的安装方法,按照大类型分为竖转法和分段安装法。
3.其中,竖转法是将钢塔在工厂预制运至桥位或在桥位拼装后在塔底设置安装转动铰,利用牵引将结构竖向旋转至设计状态的施工方法。主要适用于竖向刚度大、较轻且线性为统一平面内的规则钢塔。
4.分段安装法是将钢塔分成若干塔节在工厂进行预制,运至桥位利用提升设备进行分段安装和焊接。适用于塔身较高、线性不规则且形成为统一平面内的钢塔。
5.在这种塔身全部形成在统一平面内的钢塔,在桥位安装中体现为竖向压缩或一致的同向性,但是对于空间迈步非一致倾斜拱形钢塔在重力的影响产生的变形是空间的,变得较为复杂。
6.面对空间迈步弯扭构型的钢塔,如果采用竖转法,每个竖转索的作用力会随塔竖向转动而变化,力作用点是作空间曲线运动的,因此每根索力的变化是无规律的,所以竖转索变得不均衡,难以控制。
7.此外,如果采用分段安装法,由于钢塔倾斜型式,高度较高,无法解决钢塔较高塔节安装塔吊需要附着的问题。另外常规塔吊的吊重有限,超起重能力塔吊需要定制。钢塔在空间上不规则性,需要吊装设备多方向灵活移动,套桁架天车分段安装法,需要对超高桁架和天车专门设计,而且吊装重量也很有限。
8.可见,现有技术中常用的竖转法和分段安装法却都是仅适用于对传统的规则的索塔进行施工,而无法满足对于空间迈步非一致倾斜拱形钢塔进行安装的线形控制需求。
技术实现要素:
9.本发明的目的在于提供一种桥塔施工方法,以在一定程度上解决现有技术中的钢塔安装方法尚且不能满足将钢塔成型在非统一平面内的线形控制需求。
10.为了实现上述目的,本发明提供了以下技术方案;
11.基于上述目的,本发明提供的桥塔施工方法,钢塔包括两个塔肢和合龙段,两个塔肢位于非统一平面内,两个塔肢的顶端之间形成合龙口,合龙段在合龙口内,两个塔肢的顶端通过合龙段连接,两个塔肢的底端分别用于跨设在桥面的两侧,两个塔肢均由多个塔节搭建而成,桥塔施工方法包括以下步骤:
12.施工过程划分:将施工过程划分为多个施工阶段,选定在施工过程中同步搭建支架和塔肢,并采用支架对塔肢进行支撑;
13.拼装模拟:针对每个施工阶段后搭建的支架和塔肢建立数值耦合模型,基于塔肢的目标线形的允许变形量,仿真求解各施工阶段中支架对于钢塔的支撑位置;
14.拼装施工:在每个施工阶段中,按照求解出的相应的支撑位置安装支架,采用起重设备将塔节吊起并拼接,以使支架在相应的支撑位置对塔节进行支撑,直至将塔肢搭建完成;
15.合龙:将合龙段放入合龙口,并将两个塔肢的顶端分别与合龙段连接。
16.在上述任一技术方案中,可选地,所述拼装模拟的步骤具体包括以下步骤:
17.将每个施工阶段所要成型的支架和塔肢作为当前模拟对象,当前模拟对象包括前一施工阶段已经成型的已搭建部分和当前施工阶段所要新增的待搭建部分;
18.在当前模拟对象中的支架和塔肢之间建立沿竖直方向的刚性连接模拟单元和沿水平方向的活动连接模拟单元;
19.对活动连接模拟单元的活动范围进行约束;
20.采用壳单元模拟待搭建部分中的塔肢的塔节,采用梁单元模拟待搭建部分中的支架。
21.在上述任一技术方案中,可选地,所述拼装模拟的步骤具体包括以下步骤:
22.对具有目标线形的塔肢建模,得到起点计算模型;
23.对起点计算模型按照施工过程的逆顺序进行待搭建部分的零应力拆除,以确定每个施工阶段的已搭建部分的支撑位置,直至确定塔肢与支架之间的所有支撑位置;
24.在至少一个施工阶段的已搭建部分的基础上进行追踪单元和待搭建部分的无应力拼装,追踪单元为建立在已搭建部分与待搭建部分之间的弹性单元;
25.获取所述至少一个施工阶段的追踪单元的自重作用位移,将追踪单元的自重作用位移作为所述至少一个施工阶段的预抛高数值;
26.根据所述至少一个施工阶段的预抛高数值,预先调整所述至少一个施工阶段的待搭建部分的塔节下口的焊缝形状。
27.在上述任一技术方案中,可选地,所述拼装施工的步骤具体包括以下步骤:通过运输设备将塔节以卧式姿态运送至现场;
28.通过吊装设备连接塔节的上口位形成第一吊点,通过递送起重设备连接塔节的下口位形成第二吊点,第一吊点高于第二吊点;
29.通过吊装起重设备起升第一吊点,通过递送起重设备递送第二吊点,直至将塔节由卧式姿态翻转至竖直姿态并放置在地面;
30.将吊装起重设备从塔节的上口位拆卸并连接至下口位形成第三吊点,将递送起重设备从塔节的下口位拆卸并连接至上口位形成第四吊点,第三吊点和第四吊点分别位于塔节的轴线的两侧;
31.通过吊装起重设备起升第三吊点,通过递送起重设备递送第四吊点,直至将塔节由竖直姿态翻转至就位姿态。
32.在上述任一技术方案中,可选地,所述吊装施工的步骤具体包括以下步骤:
33.在塔节的口位处的三个侧面分别设置三个棱镜,并在塔节的口位处标定口位的特征点;
34.分别建立三个棱镜与口位的特征点之间在加工坐标系下的关系;
35.在塔节的安装坐标系下测量三个棱镜的安装坐标,结合三个棱镜与口位的特征点在加工坐标系下的关系,确定口位的四个角点的安装坐标;
36.根据口位的四个角点的安装坐标,确定口位的中心点的安装坐标;
37.将所有塔节的口位的中心点的连线作为塔肢的制作线形;
38.对比塔肢的制作线形与塔肢的目标线形分别在竖直面内的投影,获得塔肢的线形偏差。
39.在上述任一技术方案中,可选地,所述合龙的步骤具体包括以下步骤:
40.在符合设计温度的时间段内,检测合龙口大小随温度变化的规律,确定能够将合龙段放入合龙口内的第一预定温度以及合龙段与合龙口能够适配的第二预定温度;
41.在第一预定温度将合龙段放入合龙口;
42.在第二温度将合龙段分别与两个塔肢固定连接。
43.在上述任一技术方案中,可选地,所述桥塔施工方法还包括以下形状检测的步骤:
44.获取加工塔节在加工坐标系下的加工坐标,将加工塔节的加工坐标转化为在设计坐标系下的预拼装坐标;
45.获取设计塔节在设计坐标下的设计坐标;
46.将加工塔节的预拼装坐标与设计坐标进行比较,得到加工塔节与设计塔节之间的形状偏差;
47.判断形状偏差是否大于允许形状偏差,如果形状偏差不大于允许形状偏差,则加工塔节的形状合格。
48.在上述任一技术方案中,可选地,所述桥塔施工方法还包括以下预拼装的步骤:
49.将形状合格的加工塔节在设计坐标下进行拼装得到预拼装塔肢;
50.定义预拼装塔肢的线形为预拼装线性,确定预拼装线形;
51.获取塔肢的目标线形,计算预拼装线形与目标线形之间的线形偏差;
52.判断线形偏差是否大于允许线形偏差,如果线形偏差不大于允许线形偏差,则预拼装的线形控制合格。
53.在上述任一技术方案中,可选地,在形状检测步骤中,形状偏差包括每个加工塔节的轴线和设计塔节的轴线在设计坐标系下的轴线偏差;
54.在预拼装步骤中,将所有加工塔节的轴线连线在设计坐标系下的投影与设计塔节的轴线连线在设计坐标下的投影的偏差作为线形偏差。
55.在上述任一技术方案中,可选地,在所述合龙的步骤之后,还包括以下步骤:
56.拟定通过多个钢索对钢塔进行张拉,基于使得支架与钢塔之间的支撑位置处受力为0的条件进行仿真模拟,求解每条钢索所需要的张拉索力;
57.以求解得到的张拉索力对钢塔进行钢索张拉;
58.将支架拆除。
59.采用上述技术方案,本发明的有益效果:
60.本发明提供的桥塔施工方法,将施工过程划分为多个施工阶段,通过拼装模拟实现了仿真求解每个施工阶段中支架对于钢塔的支撑位置,以供拼装施工过程中以求解结果为依据同步搭建支架和塔肢,以使支架在相应的支撑位置对塔节进行支撑,确保通过起重设备搭建完成的塔肢的制作线形满足目标线形的允许变形量的要求,从而为无应力合龙提供了基础。也就是说,该桥塔施工方法通过起重设备和支架即可完成非统一平面内的两个倾斜塔肢的施工,机动性强,工期短,吊装和场地适应性强,无需对以划分的塔节进行更改。
此外,无需对起重设备进行定制和加工制造,租用即可,有利于节约设备成本和安装调试的时间成本。
附图说明
61.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
62.图1为本发明实施例一提供的桥塔施工方法的钢塔的第一投影示意图;
63.图2为本发明实施例一提供的桥塔施工方法的钢塔的第二投影示意图;
64.图3为本发明实施例一提供的桥塔施工方法的钢塔的第一施工状态示意图;
65.图4为本发明实施例一提供的桥塔施工方法所采用的吊装起重设备的结构示意图;
66.图5为本发明实施例一提供的桥塔施工方法的钢塔的轴线的第一投影示意图;
67.图6为本发明实施例一提供的桥塔施工方法的钢塔的轴线的第二投影示意图;
68.图7为本发明实施例一提供的桥塔施工方法的钢塔的第二施工状态示意图;
69.图8为本发明实施例一提供的桥塔施工方法的塔节在卧式姿态下的状态示意图;
70.图9为本发明实施例一提供的桥塔施工方法的塔节在竖直姿态下的状态示意图;
71.图10为本发明实施例一提供的桥塔施工方法在吊装模拟步骤中仿真得到的总位移随施工阶段推进变化的图像;
72.图11为本发明实施例一提供的桥塔施工方法在吊装模拟步骤中仿真得到的顺桥向位移随施工阶段推进变化的图像;
73.图12为本发明实施例一提供的桥塔施工方法在吊装模拟步骤中仿真得到的横桥向随施工阶段推进变化的图像;
74.图13为本发明实施例一提供的桥塔施工方法在吊装模拟步骤中仿真得到的竖向位移随施工阶段推进变化的图像。
75.图标:1
‑
钢塔;10
‑
塔肢;101
‑
第一吊点;102
‑
第二吊点;103
‑
第三吊点;104
‑
第四吊点;105
‑
塔节;2
‑
支架;20
‑
支撑位置;3
‑
钢索;4
‑
吊装起重设备;5
‑
目标线形;6
‑
预拼装线形。
具体实施方式
76.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
77.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
78.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相
连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
79.实施例一
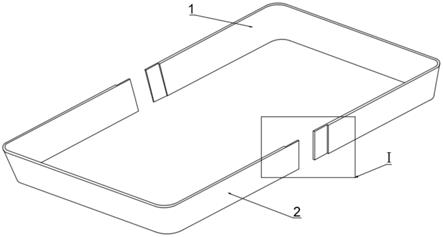
80.参见图1至图13所示,本实施例提供的桥塔施工方法用于搭建桥塔1,桥塔1包括两个塔肢10和合龙段,两个塔肢10位于非统一平面内,两个塔肢10的顶端之间形成合龙口,合龙段在合龙口内,两个塔肢10的顶端通过合龙段连接,两个塔肢10的底端分别用于跨设在桥面的两侧,两个塔肢10均由多个塔节105搭建而成。
81.本实施例提供的桥塔施工方法包括以下步骤:
82.步骤s100,施工过程划分:将施工过程划分为多个施工阶段,选定在施工过程中同步搭建支架2和塔肢10,并采用支架2对塔肢10进行支撑;
83.步骤s200,拼装模拟:针对每个施工阶段后搭建的支架2和塔肢10建立数值耦合模型,基于塔肢10的目标线形5的允许变形量,仿真求解各施工过程中支架2对于桥塔1的支撑位置20;
84.步骤s300,拼装施工:
85.步骤s400,合龙:将合龙段放入合龙口,并将两个塔肢10的顶端分别与合龙段连接。
86.在本实施例的步骤s100中,所谓“同步搭建支架2和塔肢10”具体是指,在多个施工阶段的至少部分施工阶段中,均进行支架2的搭建和塔肢10的搭建,以使支架2的高度与塔肢10的高度相适应,以起到在这些施工阶段中,通过支架2对塔肢10进行支撑的作用,而不是严格地将支架2安装和塔肢10搭建的施工进度保持一致。从而与“先将支架2全部安装完成,再进行塔肢10搭建”以及“先将塔肢10全部搭建完成,再进行支架2安装”的方案区分开来。
87.值得解释的是,之所以说是在多个施工阶段的至少部分施工阶段中,是因为,由于所有施工阶段中的前几个施工阶段中,塔肢10的搭建高度和倾斜幅度通常均较低,因而受到重力影响而产生的变形几乎可以忽略,所以出于提高施工效率和节约成本的角度考虑,可以采用无支架2方案直接进行悬拼。而当塔肢10的搭建高度达到一定高度或者倾斜幅度开始明显,则必须采用支架2进行支撑,以在施工过程中减小塔肢10的线形偏差,提高线形控制效果。且为了在合理范围内节省钢材,无需对每个塔节105均进行支撑,例如当塔肢10的搭建高度达到一定高度,每个施工阶段搭建两个塔节105,因而可以每完成两个塔节105的搭建后,采用支架2对塔肢10进行一次支撑。
88.在步骤s200中,在常规的钢塔中,线形误差主要来自塔节105的加工、制造。桥位的安装过程重力产生的变形在桥位安装中体现为竖向压缩或一致的同向性,但是对于非统一平面内的倾斜桥塔1,塔肢10在重力的影响下产生的变形是空间的,十分复杂。因而,为了减少这种空间变形的不确定性,设置支架2对搭建中的塔节105进行支撑,减少塔节105安装的竖向变形,从而减少搭建后的桥塔1的偏心受力程度,提高桥塔1的经济性。
89.塔肢10的搭建精度是横梁桥塔1的垂直度精度和设计安全性的最主要参照,塔肢10的搭建精度通过塔肢10的目标线形5的允许变形量进行定量标定。塔肢10的制造线形与
目标线形5之间的偏差为塔肢10的最终线形偏差,最终线形偏差不大于塔肢10的目标线形5的允许变形量,则说明塔肢10的线形控制合格。
90.每个施工阶段中搭建新的塔节105后,塔肢10的线形就会变化,塔肢10的线形是变化的,导致塔肢10的最终线形偏差只有在两塔肢10合拢后通过测量才能最终得到,因而需要拼装模拟来预测每个施工阶段的桥位线形。
91.在该拼装模拟步骤中,通过仿真求解每个施工阶段中支架2对于桥塔1的支撑位置20,从而确保每个施工阶段的桥位线形均能够满足塔肢10的搭建精度要求,进而克服了桥位线形在施工阶段中无法预知导致不可控的技术难点。
92.需要补充说明的是,在两个塔肢10的搭建过程中,已搭建部分主要通过自身刚度对待安装塔节105进行支撑,通过支架2的支撑作用进行辅助,以尽量减小塔肢10的线形误差,使得线形误差达到精度要求成为可能。
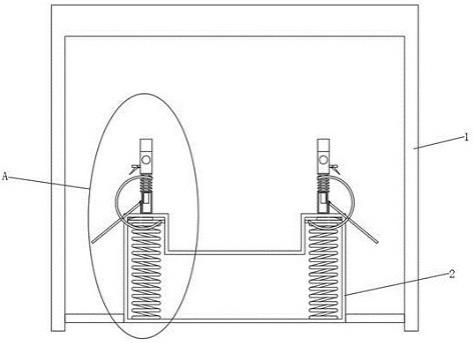
93.在步骤s300中,由于按照拼装模拟过程确定的支撑位置20安装支架2,通过安装支架2以对搭建中的塔节105进行支撑,具体而言,支架2的支撑位置20设置在已安装的塔肢10所在高度一定范围外,并与待安装塔节105的上口位高度大致持平的位置。
94.通过起重设备和预先计算好支撑位置20的支架2相配合,不仅能够提高桥塔1成型的结构性能稳定性,而且由于支架2的设置不对起重设备的机动灵活性产生影响,因而具有更高的场地适应性能、吊装性能以及施工推进效率。
95.在步骤s400中,由于两个塔肢10搭建完成后线形控制精准,因而为无应力合龙操作提供了基础。其中,支架2除了起到与塔肢10联合受力的作用外,还可以作为施工过程中的临时电梯的附着物使用,从而便于在每个施工阶段中对施工工具和施工人员进行垂直运输,此外,由于在后期的施工阶段中通常存在高频且复杂的高空作业,支架2还可以作为施工操作平台使用,能够保证高工作业安全。
96.本实施例的可选方案中,步骤s200具体包括以下步骤:
97.步骤s201,将每个施工阶段所要成型的支架2和塔肢10作为当前模拟对象,当前模拟对象包括前一施工阶段已经成型的已搭建部分和当前施工阶段所要新增的待搭建部分;
98.步骤s202,在当前模拟对象中的支架2和塔肢10之间建立沿竖直方向的刚性连接模拟单元和沿水平方向的活动连接模拟单元;
99.步骤s203,对活动连接模拟单元的活动范围进行约束;
100.步骤s204,采用单元或壳单元模拟待搭建部分中的塔肢10的塔节105,采用梁单元模拟待搭建部分中的支架2。
101.在本实施例的步骤s201和步骤s202中,通过设置活动连接模拟单元,能够模拟支架2对于塔肢10的重力形成的水平推力的消减作用,以确保支架2不会发生侧移,以沿水平方向稳定支撑塔肢10。通过设置刚性连接模拟单元,能够模拟支架2对于塔肢10的重力形成的竖直压力的平衡作用,以确保塔肢10不会发生坍塌,以沿竖直方向稳定支撑塔肢10。
102.相应的,在拼装施工的步骤中,在支架2与塔肢10的支撑位置20处设置滑转支座,以使支架2和塔肢10之间形成沿水平方向的活动连接。进一步地,为了精准对接以及使支架2和塔肢10能够方便地形成支撑,在塔节105的待支撑位置焊接钢牛腿,以使钢牛腿能够与滑转支座连接。具体而言,支架2的滑转支座与支架的其他固定部分之间的摩擦系数大约为0.02,从而使得塔节105与支架2的其他固定部分之间的摩擦系数也能够保持在这个水平,
而如果支架2不设置滑转支座,那么塔节105与支架2之间的摩擦系数将保持在大约0.2的水平。
103.可选地,可以采用摩擦连接模拟单元作为活动连接模拟单元,为了更可靠地模拟,摩擦连接模拟单元的摩擦系数保守地选定为不小于支座的摩擦系数。
104.在步骤s203中,由于塔肢10相对于支架2沿水平方向的移动范围是有限的,因而对活动连接模拟单元的活动范围进行约束,可以使得对于当前模拟对象建立的数值耦合模型更加准确地模拟实际施工过程中的塔肢10结构。
105.可选地,活动连接模拟单元的活动范围不超过100mm。
106.在步骤s204中,采用一阶四边形壳单元或一阶三角形壳单元模拟待搭建部分中的塔肢10的塔节105,均可反应桥塔板件的面内膜效应和面外弯曲效应,具有良好的数值收敛性和计算精度。
107.采用一阶铁木辛柯梁单元模拟待搭建部分中的支架2,可以反应支架2体系传递拉压弯剪扭等各种载荷的力学相应。
108.因而采用一阶四边形壳单元或一阶三角形壳单元模拟待搭建部分中的塔肢10的塔节105,以及采用一阶铁木辛柯梁单元模拟待搭建部分中的支架2,较为适合这种工况。
109.本实施例的可选方案中,步骤s200具体包括以下步骤:
110.步骤s211,对具有目标线形5的塔肢10进行建模,得到起点计算模型;
111.步骤s212,对起点计算模型按照施工过程的逆顺序进行待搭建部分的零应力拆除,以确定每个施工阶段的已搭建部分的支撑位置20;
112.步骤s213,在至少一个施工阶段的已搭建部分的基础上进行追踪单元和待搭建部分的无应力拼装,追踪单元为建立在已搭建部分与待搭建部分之间的弹性单元;
113.步骤s214,获取至少一个施工阶段的追踪单元的自重作用位移,将追踪单元的自重作用位移作为至少一个施工阶段的预抛高数值;
114.步骤s215,根据至少一个施工阶段的预抛高数值,预先调整至少一个施工阶段的待搭建部分的塔节105下口的焊接角度。
115.在本实施例的步骤s211中,可以采用步骤s201
‑
步骤s204的方法对具有目标线形5的塔肢10进行建模,能够发现随着施工阶段推进,塔肢10对支架2施加的竖向载荷存在逐渐增大的趋势。
116.追踪单元的下口位与已搭建部分的上口位共享节点,追踪单元的上口位与待搭建部分的下口位共享节点。
117.在本实施例的步骤s211至步骤s212中,依据零应力拆除模拟,确定每个施工阶段中的支架2和塔肢10之间支撑位置20,由于每次拆除均能够满足无应力拆除的要求,且以目标线形5为起点进行计算,因而能够确保当拼装施工阶段按照该步骤中确定的支撑位置20进行施工后得到的塔肢10满足目标线形5的要求。
118.在步骤s213至步骤s215中,在施工模拟中,已搭建部分由于自重或其他载荷的原因通常会发生向下的位移,但是在有限元模拟中,已搭建部分的上口位也就是待搭建部分的起始搭建参照位置是在分析之初就建立的,不能在分析过程中动态地重新定义。通过在待搭建部分和已搭建部分之间建立弹性的追踪单元,能够在已搭建部分加载时刻通过追踪单元的上口位重新定义起始搭建参照位置,使其与分析之初建立的节点位置保持一致。从
而能够有效避免待搭建部分被激活后根部产生位移突变,进而确保节点处的位移可以被控制在允许变形量内。
119.由于塔肢10的各个方向位移随着施工阶段的推进而逐步提升,受塔肢10顺桥向倾斜程度最大影响,因而顺桥向位移在三个方向的位移分量中比例最大,如果不考虑预变形的影响,那么将无法抵消塔肢10在恒定载荷下产生的位移,将无法满足精度要求。
120.而步骤s211至步骤s215,通过对追踪单元进行自重作用位移分析,得到至少一个施工阶段的预抛高数值,从而使得塔肢10与支架2的数值耦合模型同时考虑重力和预变形的影响,在至少一个施工阶段中通过塔节105的下口的焊缝形状调整合理地达到以预抛高数值为指导抵消位移,进而使得塔肢10在合龙前每个施工阶段所产生的最大位移不超过精度要求。具体而言,传统的焊缝的上边沿与下边沿互相平行,对焊缝根据预抛高数值进行调整后,上边沿被调整至预抛高位置,通常不再与焊缝的下边沿互相平行,从而使得塔节105的下口的焊接角度随之被调整。如图10至13所示,以塔高为例,在施工过程的一个施工阶段中发生了26mm的最大位移,但是可以在后续的施工阶段中将其消除,使其符合1/4000塔高的设计要求。
121.可以理解的是,在越多的施工阶段中以预抛高数值对待搭建部分的塔节105的下口的焊缝形状进行调整,那么最终得到的塔肢10的线形精度越高。出于时间、人力和物力等成本考虑,可以适当精简进行焊缝形状调整的施工阶段的数量,例如可以在一个、两个或者三个施工阶段中进行焊缝形状调整。这种通过预抛高在施工阶段中纠正塔肢10的线形的方法,相较于通过修改塔节105的形状来补偿线形偏差的方法,能够有效节约设计成本、时间成本以及钢材成本等的投入。
122.可选地,可以采用abaqus中的*elcopy指令完成追踪单元的建立。
123.本实施例的可选方案中,步骤s300具体包括以下步骤:
124.步骤s301,针对每个施工阶段所要搭建的塔节105的重量和尺寸特点,选择运输设备;
125.步骤s302,根据每个施工阶段所要搭建的塔节105的安装位置和重量,选择吊装起重设备4;
126.步骤s303,根据塔节105的姿态变化幅度,选择递送起重设备;
127.步骤s304,以关于塔节105的重心对称为原则在塔节105上布置吊耳;
128.步骤s305,通过运输设备将塔节105以卧式姿态运送至现场;
129.步骤s306,通过吊装设备连接塔节105的上口位形成第一吊点101,通过递送起重设备连接塔节105的下口位形成第二吊点102,第一吊点101高于第二吊点102;
130.步骤s307,通过吊装起重设备4起升第一吊点101,通过递送起重设备递送第二吊点102,直至将塔节105由卧式姿态翻转至竖直姿态并放置在地面;
131.步骤s308,将吊装起重设备4从塔节105的上口位拆卸并连接至下口位形成第三吊点103,将递送起重设备从塔节105的下口位拆卸并连接至上口位形成第四吊点104,第三吊点103和第四吊点104分别位于塔节105的轴线的两侧;
132.步骤s309,通过吊装起重设备4起升第三吊点103,通过递送起重设备递送第四吊点104,直至将塔节105由竖直姿态翻转至就位姿态。
133.在本实施例的步骤s301至步骤s303中,在选择运输设备的时候还可以考虑运输道
路的结构和宽度尺寸的影响。通过初步锁定的吊装起重设备4的歌工况划分塔肢10的各塔节105的起重重量,进一步地,根据各塔节105的安装位置分部以及重量从初步锁定的吊装起重设备4中确定最终参与施工的吊装起重设备4,并细化每个塔节105所对应的吊装起重设备4的主臂长度、塔臂长度、额定荷载以及工作半径等工况。根据塔节105到安装位置的安置姿态和翻转幅度选择递送起重设备。
134.可选地,吊装起重设备4选用xgc28000起重设备,递送起重设备选用quy650起重设备。
135.在步骤s304中,以关于塔节105的重心对称为原则在塔节105上布置吊耳,也就是说,在塔节105上布置多个吊耳,与便于吊装起重设备4和递送起重设备与塔节105形成连接,其中与吊装起重设备4连接的吊耳为第一吊耳,与递送起重设备连接的吊耳为第二吊耳,第一吊耳和第二吊耳关于塔节105的中心对称。
136.在步骤s305中,以卧式姿态运输能够保证塔节105以平稳不易倾倒的姿态从加工厂被运输到现场。
137.在步骤s305至步骤s306中,通过吊装起重设备4的起升动作带动塔节105起升,以使塔节105脱离运输设备并移动至靠近支架2处,通过递送起重设备的递送作用使得塔节105的下口位平稳移动至上口位的下部,减少塔节105的晃动,以使塔节105能够以平稳的状态转动至竖直姿态并放置在地面。
138.在步骤s307至步骤s308中,更换吊装起重设备4和递送起重设备的吊点,通过吊装起重设备4带动塔节105起升离地,再通过递送起升设备带动塔节105的上口位相对下口位翻转,进而将塔节105由竖直姿态翻转至就位姿态。具体而言,通过精确设计吊索长度和吊点位置,实现就位姿态的物理定位。
139.在此过程中,具体而言,存在对于塔节105的初步调整到精确调整两个过程,翻转至就位姿态之间为初步调整过程,初步调整后,当主吊车将阶段缓慢上升至就位高度,待塔节105稳定5分钟后,旋转至阶段安装位置,待塔节105稳定10分钟后,起重机再缓慢下落。如果姿态还有差异,采用吊装起重设备4和递送起重设备进行空间位置关系的调整,最后利用四台液压油缸的伸缩实现各吊点的位置的移动,实现塔节105位置的精调。
140.第一次精调完成后,通过下面塔节105的上口位焊接卡板进行初定位,对塔节105进行临时限位,防止摆动,不限制高度方向位移。然后进行塔节105四个棱角部位的错边量修正,以满足错边量偏差要求,进行刚性码固焊接。采用热矫正配合冷矫正的措施,对其他部位的错边量进行修正,是其他部位满足错边量偏差要求。
141.测量人员对塔节105的姿态进行测量,根据测量结果进行分析,如果姿态差异较大,再次进行精调、临时码固、修边并测量,直至符合要求。
142.可选地,在以上对塔节105进行运输和姿态调整的过程中,考虑到塔节105的尺寸较大,避免吊索与水平面夹角过小,可以在吊装起重设备4上设置平衡梁,以使吊索能够保持垂直受力。
143.本实施例的可选方案中,步骤s300具体包括以下步骤:
144.步骤s311,在塔节105的口位处的三个侧面分别设置三个棱镜,并在塔节105的口位处标定口位的特征点;
145.步骤s312,分别建立三个棱镜与口位的特征点之间在加工坐标系下的关系;
146.步骤s313,在塔节105的安装坐标系下测量三个棱镜的安装坐标,结合三个棱镜与口位的特征点在加工坐标系下的关系,确定口位的四个角点的安装坐标;
147.步骤s314,根据口位的四个角点的安装坐标,确定口位的中心点的安装坐标;
148.步骤s315,将所有塔节105的口位的中心点的连线作为塔肢10的制作线形;
149.步骤s316,对比塔肢10的制作线形与塔肢10的目标线形5分别在竖直面内投影,获得塔肢10的线形偏差。
150.在步骤s311和步骤s312中,由于支架2的遮挡,只能实现对于塔节105的三个侧面的测量,因而通过将三个棱镜分别设置在塔节105的不被支架2遮挡的三个侧面,便于在步骤s313中对三个棱镜的安装坐标进行测量。此外,口位的特征点可以为口位的四个角点处的任一交点坐标,也可以为其他易于标定的参照点。以上操作均可以在加工厂内完成,以提高拼装施工阶段的施工效率。
151.在步骤s314、步骤s315和步骤s316中,由于四个角点的安装坐标不容易测量,所以通过测量三个棱镜的安装坐标口位的四个角点的安装坐标,数据采集操作高效精确,为得到塔肢10的制作线形提供了数据基础。具体而言,通过塔肢10的制作线形与目标线形5分别在竖直面内的投影进行对比,可以将沿横桥向以及沿顺桥向两个维度在竖直面内的正投影分别进行对比,以更加直观且高效地得到塔肢10的线形偏差,实现拼装施工过程中塔肢10的线形控制。
152.本实施例的可选方案中,步骤s400具体包括以下步骤:
153.步骤s401,在符合设计温度的时间段内,检测合龙口大小随温度变化的规律,确定能够将合龙段放入合龙口内的第一预定温度以及合龙段与合龙口能够适配的第二预定温度;
154.步骤s402,在第一预定温度将合龙段放入合龙口;
155.步骤s403,在第二温度将合龙段分别与两个塔肢10固定连接。
156.在步骤s401中,所谓“符合设计温度的时间段”是指气候条件比较稳定的且温度、湿度适宜、无雨雪的时日。为了简化规律获取难度,在一天中温度最低时段及设计合龙温度时段进行采集,对比分析合龙口在较低温度计合龙温度时段的变形情况,如此反复测量至少三天,以确保获取的合龙口大小随温度变化的规律是准确的、可供参考的,从而确定能够使得合龙段顺利放入到合龙口内的第一预定温度,其中,值得强调的是,“顺利放入”不能等同于“刚好能够放入”,而是指合龙口除了合龙段占用的空间外,还应该有裕量。第二预定温度通常与设计合龙温度大致持平,但是会由于测量时间段的气候影响关于设计合龙温度在合理范围内波动。
157.在步骤s402和s403中,在第一预定温度下将合龙段无障碍地放入合龙口,并在合适的第二预定温度下进行码固焊接,可以完成两个塔肢10与合龙段的无应力合龙。
158.本实施例的可选方案中,该桥塔施工方法还包括以下的形状检测的步骤:
159.步骤s501,获取加工塔节105在加工坐标系下的加工坐标,将加工塔节105的加工坐标转化为在设计坐标系下的预拼装坐标;
160.步骤s502,将加工塔节105的预拼装坐标与设计坐标进行比较,得到加工塔节105与设计塔节105之间的形状偏差;
161.步骤s503,判断形状偏差是否大于允许形状偏差,如果形状偏差不大于允许形状
偏差,则加工塔节105的形状合格。
162.在本实施例中的步骤s501中,加工坐标系与设计坐标系之间存在固有的转换关系,从而通过二者之间固有的转换关系,可以将加工塔节105的加工坐标转换为预拼装坐标,以便于在步骤s502中将加工塔节105和设计塔节105共同在设计坐标系下进行比较,可以理解的是,被比较的加工塔节105和设计塔节105是相应的关系。
163.在步骤s502中,获取形状偏差的过程中,具体而言,可以先通过加工塔节105的上口位的四个角点的坐标得到上口位平面方程,得到上口位平面法向量,从而得到上口位平面法向量,进而得到上口位平面法向量沿横桥向在竖直平面内的投影分量以及沿顺桥向在竖直平面内的投影分量。同理,可以依照此方法分别得到加工塔节105的下口位平面法向量、设计塔节105的上口位平面法向量以及设计塔节105的上口位平面法向量在上述两个投影平面内的投影分量。
164.从而通过对加工塔节105和设计塔节105的上口位平面法向量的投影进行对比,可以得到加工塔节105的上口位与设计塔节105的上口位之间的端口平面夹角,同理,能够得到加工塔节105的下口位与设计塔节105的下口位之间的端口平面夹角。
165.端口平面夹角仅是衡量加工塔节105的制造精度的指标之一,还可以通过将加工塔节105的轴线和设计塔节105的轴线在设计坐标系下的轴线偏差,具体而言,可以按照顺桥向和横桥向双向对二者的轴线分别进行分解,以确定加工塔节105与设计塔节105的轴线偏差。
166.在步骤s503中,具体而言,当端口平面夹角不大于允许夹角,则说加工塔节105的端口平面角合格,当轴线偏差不大于允许轴线偏差,则说明加工塔节105的轴线偏差控制合格。
167.通过步骤s501至s503,一方面,在拼接施工之前对加工塔节105的形状进行检测,有利于降低拼装施工的满足,提高拼装施工的质量,另一方面,由于加工塔节105是多向曲面钢制塔节105,所以对于其形状验证困难,通过分别沿横桥面和顺桥面在竖向平面进行投影,将线形偏差转化为两方向的平面曲线及平面夹角的对比,巧妙化解了验证困难的问题,通过将两方向误差都同时控制在允许误差范围之内,实现了加工塔节105的质量控制。
168.本实施例的可选方案中,该桥塔施工方法包括预拼装的步骤:
169.步骤s601,将形状合格的加工塔节105在设计坐标下进行拼装得到预拼装塔肢10;
170.步骤s602,定义预拼装塔肢10的线形为预拼装线性,确定预拼装线形6;
171.步骤s603,获取塔肢10的目标线形5,计算预拼装线形6与目标线形5之间的线形偏差;
172.步骤s604,判断线形偏差是否大于允许线形偏差,如果线形偏差不大于允许线形偏差,则预拼装的线形控制合格。
173.如图5和图6所示,在本实施例的步骤s601至步骤s603中,通过连接各塔节105的轴线而得到预拼装线性,通过控制预拼装线形6和目标线形5的线形偏差,实现预拼装塔肢10的线形控制,以供拼装施工参考。
174.可选地,将所有加工塔节105的轴线连接线在设计坐标系下的投影与设计塔节105的轴线连线在设计坐标下的投影的偏差作为线形偏差。具体而言,将二者在设计坐标系下在xoz表面和yoz表面的投影的偏差作为线性偏差,x方向对应顺桥向方向,y方向对应横桥
向方向。为了进一步简化线性偏差是够在允许线形偏差内,可以在投影表面预先标定出允许线形偏差范围,从而通过判断加工塔节105的预拼装线形6是否落入允许线形偏差范围内,即可知道加工塔节105的预拼装线形6是否合格。
175.本实施例的可选方案中,在合龙的步骤之后还包括以下步骤:
176.步骤s701,拟定通过多个钢索3对桥塔1进行张拉,基于使得支架2与桥塔1之间的支撑位置20处受力为0的条件进行仿真模拟,求解每条钢索3所需要的张拉索力;
177.步骤s702,以求解得到的张拉索力对桥塔1进行钢索3张拉;
178.步骤s703:将支架2拆除。
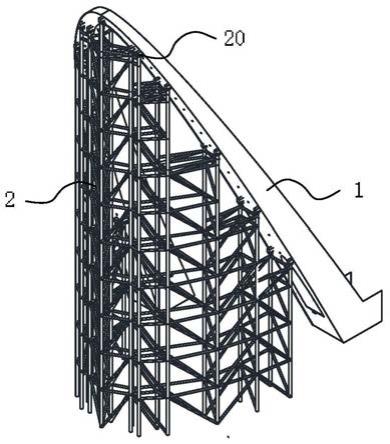
179.如图7所示,在本实施例的步骤s701和步骤s702中,通过钢索3对桥塔1进行张拉后,可以使得支架2与桥塔1之间的支撑位置20处受力为0,也就是说,使得支架2与桥塔1之间完全脱离。从而在步骤s703中能够顺利将支架2拆除,且将支架2拆除后,桥塔1的线形由拉索控制和保持。
180.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。此外,本领域的技术人员能够理解,尽管在此所述的一些实施例包括其它实施例中所包括的某些特征而不是其它特征,但是不同实施例的特征的组合意味着处于本发明的范围之内并且形成不同的实施例。例如,所要求保护的实施例的任意之一都可以以任意的组合方式来使用。公开于该背景技术部分的信息仅仅旨在加深对本发明的总体背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域技术人员所公知的现有技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。