1.本发明涉及道路坑槽挖掘设备技术领域,尤其涉及一种道路坑槽智能开挖机。
背景技术:
2.道路由于材料和外界环境的作用,在雨水侵蚀及车辆碾压的过程中,总会出现坑槽等常见问题。坑槽的及时、快速、精确、高质量修补是道路养护的重点。如何对原坑槽开挖以方便修复时精确地把握修补材料的用量,使修补材料更加均匀、密实,提高修补质量是非常关键的一环。现行工艺基本上是靠个人经验判断操作,施工质量取决于操作工的作业水平,导致施工质量参差不齐,坑槽检测、开挖工序繁琐,作业时间长。
技术实现要素:
3.为解决背景技术中存在的技术问题,本发明提出一种道路坑槽智能开挖机。
4.本发明提出的一种道路坑槽智能开挖机,包括执行系统;
5.执行系统包括:
6.基座,水平布置;
7.挖坑组件,活动安装在基座上;
8.驱动机构,与挖坑组件驱动连接以驱动挖坑组件的执行件执行动作;
9.总控制机构,用于基于预设的修复策略控制驱动机构驱动挖坑组件的执行件执行动作以对原坑槽开挖;与驱动机构控制连接。
10.优选地,还包括检测系统;
11.检测系统包括:
12.获取模块,用于获取原坑槽的位置参数以及原坑槽的三维轮廓在x轴、y轴和z轴的尺寸参数;
13.存储模块,用于存储原坑槽的位置参数以及原坑槽的三维轮廓在x轴、y轴和z轴的尺寸参数;
14.分析模块,用于基于原坑槽的三维轮廓在x轴、y轴和z轴的尺寸参数,模拟出原坑槽的立体形状;
15.确定模块,用于基于分析模块模拟的原坑槽的立体形状,根据预设的修复策略确定开挖坑槽的立体形状,且根据预设的修复策略确定的开挖坑槽的立体形状包覆原坑槽的立体形状;
16.控制模块,总控制机构、获取模块、存储模块、分析模块和确定模块均与控制模块电连接。
17.优选地,驱动机构包括第一安装座、第二安装座、第三安装座、第一驱动机构、第二驱动机构、第三驱动机构和第四驱动机构;
18.第一安装座,安装在基座上并可在基座上沿着x轴方向进行滑动;
19.第一驱动机构,与第一安装座驱动连接用于驱动第一安装座在基座上沿x轴方向
滑动;
20.第二安装座,安装在第一安装座上并可在第一安装座上沿着z轴方向进行滑动;
21.第二驱动机构,与第二安装座驱动连接用于驱动第二安装座在第一安装座上沿z轴方向滑动;
22.第三安装座,安装在第二安装座上并可在第二安装座上沿着y轴方向进行滑动;
23.第三驱动机构,与第三安装座驱动连接用于驱动第三安装座在第二安装座上沿y轴方向滑动;
24.第四驱动机构,与挖坑组件驱动连接用于驱动挖坑组件的执行件转动;
25.总控制机构与第一驱动机构、第二驱动机构、第三驱动机构、第四驱动机构控制连接,总控制机构用于顺序控制第一驱动机构、第二驱动机构、第三驱动机构、第四驱动机构动作以执行对检测组件的执行件沿着x轴、z轴、y轴方向进行移动并转动以对坑槽进行挖坑。
26.优选地,基座上设有沿x轴方向布置且相互平行的一对第一导轨,第一安装座可滑动安装在第一导轨上。
27.优选地,第一安装座上设有沿z轴方向布置且相互平行的一对第二导轨,第二安装座可滑动安装在第二导轨上。
28.优选地,第二安装座上设有沿y轴方向布置且相互平行的一对第三导轨,第三安装座可滑动安装在第三导轨上。
29.本发明中,所提出的道路坑槽智能开挖机,总控制机构基于预设的“圆洞方补”,“小洞大补”,“斜洞正补”,“浅洞深补”,“连续坑槽合并修补”,“切线外适当移”等修复策略控制驱动机构驱动挖坑组件的执行件执行动作以对路面原坑槽开挖;省去了人工对原坑槽开挖前的分析和决策工作,提高工作效率,缩短坑槽开挖工期;采用基于预设的修复策略开挖出的坑槽在满足修补条件的情况下,所需的修补材料用量最小,且可使得修补材料更加均匀、密实以提高修补质量。
附图说明
30.图1为本发明提出的一种道路坑槽智能开挖机的原理框图。
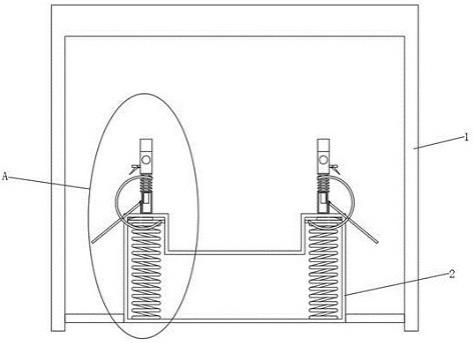
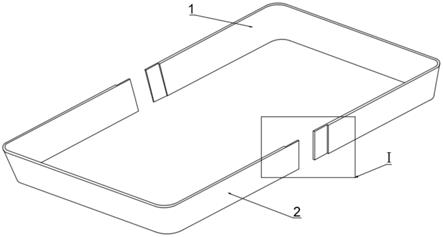
31.图2为本发明提出的一种道路坑槽智能开挖机的结构示意图。
具体实施方式
32.如图1
‑
2所示,图1为本发明提出的一种道路坑槽智能开挖机的原理框图。图2为本发明提出的一种道路坑槽智能开挖机的结构示意图。
33.参照图1
‑
2,本发明提出的一种道路坑槽智能开挖机,包括执行系统;
34.执行系统包括:
35.基座1,水平布置;
36.挖坑组件5,活动安装在基座1上;
37.驱动机构,与挖坑组件5驱动连接以驱动挖坑组件5的执行件执行动作;
38.总控制机构,用于基于预设的修复策略控制驱动机构驱动挖坑组件5的执行件执行动作以对原坑槽开挖;与驱动机构控制连接。
39.本实施例的道路坑槽智能开挖机在具体工作过程中,总控制机构基于预设的“圆洞方补”,“小洞大补”,“斜洞正补”,“浅洞深补”,“连续坑槽合并修补”,“切线外适当移”等修复策略控制驱动机构驱动挖坑组件5的执行件执行动作以对路面原坑槽开挖。
40.在本实施例中,所提出的道路坑槽智能开挖机,总控制机构基于预设的“圆洞方补”,“小洞大补”,“斜洞正补”,“浅洞深补”,“连续坑槽合并修补”,“切线外适当移”等修复策略控制驱动机构驱动挖坑组件5的执行件执行动作以对路面原坑槽开挖;省去了人工对原坑槽开挖前的分析和决策工作,提高工作效率,缩短坑槽开挖工期;采用基于预设的修复策略开挖出的坑槽在满足修补条件的情况下,所需的修补材料用量最小,且可使得修补材料更加均匀、密实以提高修补质量。
41.在具体实施方式中,还包括检测系统;
42.检测系统包括:
43.获取模块6,用于获取原坑槽的位置参数以及原坑槽的三维轮廓在x轴、y轴和z轴的尺寸参数;
44.存储模块,用于存储原坑槽的位置参数以及原坑槽的三维轮廓在x轴、y轴和z轴的尺寸参数;
45.分析模块,用于基于原坑槽的三维轮廓在x轴、y轴和z轴的尺寸参数,模拟出原坑槽的立体形状;
46.确定模块,用于基于分析模块模拟的原坑槽的立体形状,根据预设的修复策略确定开挖坑槽的立体形状,且根据预设的修复策略确定的开挖坑槽的立体形状包覆原坑槽的立体形状;
47.控制模块,总控制机构、获取模块6、存储模块、分析模块和确定模块均与控制模块电连接。
48.获取模块6对原坑槽的位置参数以及原坑槽的三维轮廓在x轴、y轴和z轴的尺寸参数进行获取,存储模块存储原坑槽的位置参数以及原坑槽的三维轮廓在x轴、y轴和z轴的尺寸参数,分析模块基于原坑槽的三维轮廓在x轴、y轴和z轴的离散的尺寸参数进行分析并模拟出原坑槽的立体形状,确定模块基于分析模块模拟的原坑槽的立体形状,根据预设的修复策略确定开挖坑槽的立体形状,且根据预设的修复策略确定的开挖坑槽的立体形状在可将原坑槽的立体形状完全包覆的条件下其体积达到最小,以使开挖后的坑槽在满足修补条件的情况下,所需的修补材料用量最小,且可使得修补材料更加均匀、密实以提高修补质量;省去了人工对原坑槽开挖前的检测、分析和决策工作,提高工作效率,进一步缩短坑槽开挖工期。
49.进一步地,驱动机构包括第一安装座2、第二安装座3、第三安装座4、第一驱动机构、第二驱动机构、第三驱动机构和第四驱动机构;
50.第一安装座2,安装在基座1上并可在基座1上沿着x轴方向进行滑动;
51.第一驱动机构,与第一安装座2驱动连接用于驱动第一安装座2在基座1上沿x轴方向滑动;
52.第二安装座3,安装在第一安装座2上并可在第一安装座2上沿着z轴方向进行滑动;
53.第二驱动机构,与第二安装座3驱动连接用于驱动第二安装座3在第一安装座2上
沿z轴方向滑动;
54.第三安装座4,安装在第二安装座3上并可在第二安装座3上沿着y轴方向进行滑动;
55.第三驱动机构,与第三安装座4驱动连接用于驱动第三安装座4在第二安装座3上沿y轴方向滑动;
56.第四驱动机构,与挖坑组件5驱动连接用于驱动挖坑组件5的执行件转动;
57.总控制机构与第一驱动机构、第二驱动机构、第三驱动机构、第四驱动机构控制连接,总控制机构用于顺序控制第一驱动机构、第二驱动机构、第三驱动机构、第四驱动机构动作以执行对检测组件的执行件沿着x轴、z轴、y轴方向进行移动并转动以对原坑槽进行开挖。
58.总控制机构顺序控制第一驱动机构、第二驱动机构、第三驱动机构、第四驱动机构动作以执行对检测组件的执行件沿着x轴、z轴、y轴方向进行移动并转动以对原坑槽基于预定的修复策略进行开挖。
59.在其他具体实施方式中,基座1上设有沿x轴方向布置且相互平行的一对第一导轨,第一安装座2可滑动安装在第一导轨上。
60.第一安装座2带动挖坑组件5在第一导轨上实现x轴方向的水平移动。
61.进一步地,第一安装座2上设有沿z轴方向布置且相互平行的一对第二导轨,第二安装座3可滑动安装在第二导轨上。
62.第二安装座3带动挖坑组件5在第二导轨上实现z轴方向的竖直移动。
63.进一步地,第二安装座3上设有沿y轴方向布置且相互平行的一对第三导轨,第三安装座4可滑动安装在第三导轨上。
64.第三安装座4带动挖坑组件5在第三导轨上实现y轴方向的水平移动。
65.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。