存储器均设置在所述无人驾驶底盘上。
10.优选地,所述视觉传感器还包括补光器,所述补光器设置在所述无人驾驶底盘上;所 述补光器为所述车载视觉采集器近距离确认和识别垃圾类型补光。
11.优选地,所述无线收发模块能够实时接收负责清扫路段洒水车的实时洒水数据,并且 将数据传输至所述处理器,同时所述无线收发模块能够实时接收所述数据中心发送的天气 信息。
12.优选地,所述智能清扫系统还包括垃圾箱、水箱、过滤网、风机和液压装置,所述垃 圾箱和所述液压装置均设置在所述无人驾驶底盘上,所述水箱、所述过滤网和所述风机均 设置在所述垃圾箱上,所述智能扫盘设置在所述液压装置上;所述垃圾箱包括吸虑垃圾箱 和捡拾垃圾箱,所述过滤网和所述风机均设置在所述吸虑垃圾箱上,所述风机通过吸风管 路与所述过滤网连通,同时所述吸风管路端部设置有吸盘;所述水箱通过喷水管路向所述 智能扫盘前地面实施喷雾除尘。
13.优选地,所述旋转电机设置在所述液压装置上,并且所述旋转电机的转轴侧壁上设置 有滑动槽;所述常规扫盘包括旋转盘、外层扫刷毛束和内层扫刷毛束,所述旋转盘设置在 所述旋转电机的转轴上,所述外层扫刷毛束一端固定设置在所述旋转盘上,并且所述旋转 盘上与所述外层扫刷毛束连接处设置有多个第一增强贯穿孔;所述内层扫刷毛束一端固定 设置在所述旋转盘上,并且所述旋转盘上与所述内层扫刷毛束连接处设置有多个第二增强 贯穿孔。
14.优选地,所述清扫增强件包括磁力施力件和随动增强件,所述磁力施力件设置在所述 液压装置上,所述随动增强件设置在所述旋转电机上;所述磁力施力件包括固定管和磁力 线圈,所述固定管设置在所述液压装置上,所述磁力线圈嵌装在所述固定管内,并且所述 磁力线圈套在所述旋转电机的转轴外部。
15.优选地,所述随动增强件包括随动管、施力板、外层增强扫刷毛束、复位弹簧和内层 增强扫刷毛束,所述随动管内壁上设置有滑动块,所述随动管套在所述旋转电机的转轴上, 并且所述滑动块与所述滑动槽配合,所述施力板固定套装在所述随动管一端外壁上,所述 施力板上设置有永磁铁,所述永磁铁上设置有推力球轴承;所述外层增强扫刷毛束由多根 第一硬质刷地毛构成,所述外层增强扫刷毛束一端铰接在所述施力板上,并且所述外层增 强扫刷毛束另一端的多根第一硬质刷地毛逐一对应插入所述第一增强贯穿孔内;所述复位 弹簧套装在所述外层增强扫刷毛束上,所述内层增强扫刷毛束由多根第二硬质刷地毛构 成,所述内层增强扫刷毛束一端铰接在所述施力板上,并且所述内层增强扫刷毛束另一端 的多根第二硬质刷地毛逐一对应插入所述第二增强贯穿孔内。
16.优选地,所述软体夹持件包括抓持固定座和软体抓爪,所述抓持固定座设置在所述机 械臂上,所述软体抓爪设置在所述抓持固定座上;所述抓持固定座一端面上贯通连接有增 压输气嘴,所述增压输气嘴上连接有调节器,所述调节器通过增压输气管与所述风机连同, 并且所述调节器与所述中央控制器电连接;所述软体抓爪呈中空气囊状,所述软体抓爪端 口贯通设置在所述抓持固定座另一端面上;多条所述软体抓爪围绕所述抓持固定座轴线均 匀分布。
17.本发明还提供了基于人工智能识别适应不同路段的环卫清扫系统的作业方法,所述方 法包含:
18.1)所述旋转云台根据光线照射角度带动所述俯视视觉采集器转动,以调整所述俯视 视觉采集器对负责监测区域路面拍摄清晰路面图像;
19.2)所述俯视视觉采集器将所拍摄路面图像无线传输至所述车载控制系统,所述车载 控制系统将路面图像传递至所述处理器做信息比对;
20.3)所述处理器判断所述区域地面是否有垃圾和垃圾量是否达到预定阈值;
21.4)所述处理器判断所述区域路面垃圾量达到预定阈值后,将控制所述无人驾驶底盘 行至此区域处;
22.5)所述车载视觉采集器将对所述区域进行近距离拍摄图像,并将拍摄图像传递至所 述处理器,以进一步确认垃圾和识别垃圾种类;
23.6)当识别垃圾为树叶、杂草和灰土垃圾时,将启动所述风机和所述智能扫盘对垃圾 进行清扫;当识别垃圾为易拉罐、塑料瓶、玻璃瓶可回收垃圾时,将启动所述智能机械手 进行捡拾。
24.本发明至少包括以下有益效果:
25.1)本发明基于人工智能识别适应不同路段的环卫清扫系统和方法设计合理、智能化 程度高、路面清扫效率和质量高、清扫运行安全可靠,制造成本低适合大面积普及使用;
26.2)本发明基于人工智能识别适应不同路段的环卫清扫系统和方法设置了俯视视觉采 集器和车载视觉采集器,所述俯视视觉采集器设置在路灯杆上,使得俯视视觉采集器视野 宽广,实时监测的范围更大,更有利于随时发现路面上的垃圾,以及时将路面垃圾信息传 递至车载控制系统,使无人驾驶清扫车行至垃圾处;车载视觉采集器设置在无人驾驶系统 上,待无人驾驶清扫车行至垃圾处时,确认垃圾和确认垃圾类型,为后续智能清扫系统提 供信息和指引;俯视视觉采集器和车载视觉采集器相互配合,能够及时发现并清除垃圾, 防止垃圾停留路面时间长,影响路面清洁和行车安全;并且通过俯视视觉采集器实时路面 监控,也避免了无人驾驶清洁车无功而返,降低了无人驾驶清洁车出勤量,提高了使用效 率;
27.3)本发明基于人工智能识别适应不同路段的环卫清扫系统和方法设置了智能扫盘和 智能机械手,所述智能扫盘包括旋转电机、常规扫盘和清扫增强件,当垃圾未粘附在路面 时旋转电机将通过所述常规扫盘清扫垃圾,当垃圾粘附在路面难以清扫时,车载自动控制 系统将启动所述清扫增强件,能够有效提高路面清扫效率和清扫质量;所述智能机械手通 过软体抓爪取代了传统的刚性机械手,有效简化了系统复杂度,提高了清扫运行可靠性和 降低了制造成本。
28.本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明 的研究和实践而为本领域的技术人员所理解。
附图说明
29.图1为本发明基于人工智能识别适应不同路段的环卫清扫系统结构示意图;
30.图2为本发明基于人工智能识别适应不同路段的环卫清扫系统主视图;
31.图3为本发明基于人工智能识别适应不同路段的环卫清扫系统前端主视图;
32.图4为本发明基于人工智能识别适应不同路段的环卫清扫系统俯视图;
33.图5为本发明基于人工智能识别适应不同路段的环卫清扫系统立体结构示意图;
述车载视觉采集器3和所述补光器均设置在所述无人驾驶底盘1上。所述俯视视觉采集器 通过旋转云台设置在所述路灯杆上,所述俯视视觉采集器根据不同路段垃圾量和所述俯视 视觉采集器拍摄距离选择安装数量和安装距离。每一个所述俯视视觉采集器按照设定时间 对所负责监测区域路面实时监控拍摄,并且将所述区域路面图像信息实时通过所述车载控 制系统传输至所述处理器,所述处理器根据预设程序将实时拍摄的图像信息做比对,当发 觉垃圾存在,并且所述垃圾量达到预定阈值后将通过所述车载控制系统启动所述无人驾驶 系统行至此区域进行检测和清扫。所述俯视视觉采集器通过无线传输方式向所述车载控制 器实施数据传输。所述旋转云台能够根据日光照射角度发生转动,以防止逆光拍摄或路面 反光,影响路面拍摄清晰度。
44.所述无人驾驶系统能够根据俯视视觉采集器监测情况运行,同时亦能够按照预定路线 进行路面巡检。所述车载视觉采集器3设置有两个,两个所述车载视觉采集器3对称设置 在所述无人驾驶底盘1前端,两个所述车载视觉采集器3能够提高垃圾拍摄清晰度。所述 车载视觉采集器3将所拍摄路面图像传输至所述处理器进一步比对确认,并且识别垃圾类 型,为后续垃圾清扫和分类做数据支撑。所述补光器能够根据所述车载视觉采集器3所需 拍摄位置照度情况进行补光处理,以提高所述车载视觉采集器3拍摄清晰度。所述俯视视 觉采集器和所述车载视觉采集器3将采集比对后的图像信息存储至所述存储器内,作为人 工智能自我学习资料库和此区域此时间段垃圾种类和垃圾量的原始数据库,为后续统计优 化适应不同路段的环卫清扫方案做数据储备。
45.所述车载控制系统包括无线收发模块和中央控制器,所述无线收发模块能够实时接收 负责清扫路段洒水车的实时洒水数据,并且将数据传输至所述处理器,以作为比对路面图 像信息的修正参数,提高识别准确率。同时所述无线收发模块能够实时接收数据中心发送 的天气信息,作为图像信息比对修正参数,通过持续接收信息完成自我修正,提高图像识 别准确度。
46.所述数据中心实时接收所述车载控制系统发送的数据,所述数据中心作为备份中心运 行,并且实时向所述车载控制系统发送天气信息。
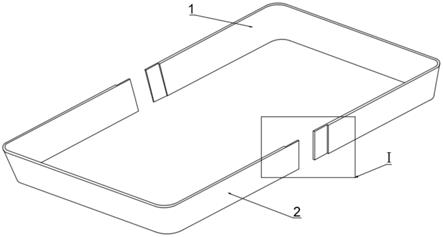
47.所述智能清扫系统包括垃圾箱4、水箱、过滤网、风机、液压装置5、智能扫盘和智 能机械手,所述垃圾箱4、所述液压装置5和所述智能机械手均设置在所述无人驾驶底盘 1上,所述水箱、所述过滤网和所述风机均设置在所述垃圾箱4上,所述智能扫盘设置在 所述液压装置5上。所述垃圾箱4包括吸虑垃圾箱和捡拾垃圾箱,所述过滤网和所述风机 均设置在所述吸虑垃圾箱上,所述风机与所述无人驾驶底盘1的电源电连接,并且所述风 机通过吸风管路与所述过滤网连通,同时所述吸风管路端部设置有吸盘6,所述风机通过 吸盘6、吸风管路和过滤网将垃圾吸入所述过滤垃圾箱内。所述水箱通过喷水管路向所述 智能扫盘前地面实施喷雾除尘。所述液压装置5能够控制所述垃圾箱和所述智能扫盘动 作。
48.所述智能扫盘包括旋转电机7、常规扫盘和清扫增强件,所述旋转电机7和所述清扫 增强件均设置在所述液压装置5上,所述常规扫盘设置在所述旋转电机7上。所述旋转电 机7的转轴贯穿所述液压装置5,并且所述旋转电机7的转轴侧壁上设置有滑动槽,所述 滑动槽轴向线与所述旋转电机7的转轴轴线平行,所述常规扫盘设置在所述旋转电机7的 转轴上。所述常规扫盘包括旋转盘8、外层扫刷毛束9和内层扫刷毛束10,所述旋转盘8 设置在所述旋转电机7的转轴上,所述外层扫刷毛束9和所述内层扫刷毛束10均设置在 所述旋转
盘8上。所述外层扫刷毛束9一端固定设置在所述旋转盘8上,并且所述旋转盘 8上与所述外层扫刷毛束9连接处设置有十个第一增强贯穿孔,所述第一增强贯穿孔用于 被所述清扫增强件穿过以提高对贴附在地面上的树叶等垃圾清扫效果。所述外层扫刷毛束 9设置有十二束,十二束所述外层扫刷毛束9围绕所述旋转盘8轴线均匀分布。所述内层 扫刷毛束10一端固定设置在所述旋转盘8上,并且所述内层扫刷毛束10至所述旋转盘8 轴线水平距离小于所述外层扫刷毛束9至所述旋转盘8轴线水平距离,同时所述旋转盘8 上与所述内层扫刷毛束10连接处设置有十个第二增强贯穿孔,所述第二增强贯穿孔用于 被所述清扫增强件穿过以提高对贴附在地面上的树叶等垃圾清扫效果。所述内层扫刷毛束 10设置有十二束,十二束所述内层扫刷毛束10围绕所述旋转盘8轴线均匀分布。
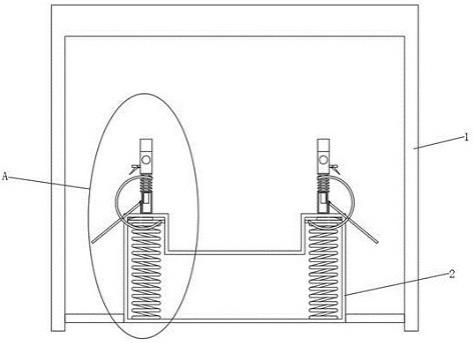
49.所述清扫增强件包括磁力施力件和随动增强件,所述磁力施力件设置在所述液压装置5上,所述随动增强件设置在所述旋转电机7上。磁力施力件包括固定管11和磁力线圈 12,所述固定管11设置在所述液压装置5上,并且所述固定管11套在所述旋转电机7的 转轴外部,所述磁力线圈12嵌装在所述固定管11内,并且所述磁力线圈12套在所述旋 转电机7的转轴外部,同时所述磁力线圈12内径大于所述旋转电机7的转轴直径。所述 磁力线圈12与所述无人驾驶底盘1的电源电连接,并受所述中央控制器控制输入正向电 流,以使所述磁力线圈12产生磁场。
50.所述随动增强件包括随动管13、施力板14、外层增强扫刷毛束15、复位弹簧16和 内层增强扫刷毛束17,所述随动管13设置在所述旋转电机7的转轴上,所述施力板14 设置在所述随动管13上,所述外层增强扫刷毛束15和所述内层增强扫刷毛束17均设置 在所述施力板14上,所述复位弹簧16设置在所述外层增强扫刷毛束15上。所述随动管 13外径小于所述磁力线圈12内径,所述随动管13内壁上设置有滑动块,所述随动管13 套在所述旋转电机7的转轴上,并且所述滑动块与所述滑动槽配合,使得所述随动管13 能够随着所述旋转电机7的转轴转动而转动。所述施力板14固定套装在所述随动管13一 端外壁上,并且随所述随动管13沿所述滑动槽轴向往复滑动。所述施力板14上设置有永 磁铁,所述永磁铁能够增强与所述磁力线圈12磁场斥力。所述永磁铁上设置有推力球轴 承19,并且所述推力球轴承19套在所述随动管13外。当所述施力板14随所述随动管13 向上移动特定距离时,所述推动板能够通过所述推力球轴承19与所述固定管11间实现相 对周向转动。
51.所述外层增强扫刷毛束15由十根第一硬质刷地毛构成,具体的所述第一硬质刷地毛 为硬质塑料丝和钢丝其中一种或其组合。所述外层增强扫刷毛束15一端铰接在所述施力 板14上,并且所述外层增强扫刷毛束15另一端的十根第一硬质刷地毛逐一对应插入所述 第一增强贯穿孔内。所述外层增强扫刷毛束15设置有十二束,十二束所述外层增强扫刷 毛束15围绕所述施力板14轴线均匀分布,并且所述外层增强扫刷毛束15与所述施力板 14铰接点至所述施力板14轴线水平距离小于所述外层扫刷毛束9与所述旋转盘8设置点 至所述旋转盘8轴线水平距离,使得所述施力板14向下移动时,能够使十根所述第一硬 质刷地毛另一端分散开,以扩大扫刷面积。所述复位弹簧16自然长度不小于所述固定管 11至所述施力板14距离,所述复位弹簧16套装在所述外层增强扫刷毛束15上,所述复 位弹簧16设置有十二个,十二个所述复位弹簧16与十二个所述外层增强扫刷毛束15逐 一对应。当路面含水较少,树叶等垃圾未粘附在地面时,磁力线圈12停止输入直流电, 此时所述复位弹簧16将推动所述施力板14向上移动,直至推力球轴承19与所述固定管 11接触,所述施力板14将
智能扫盘对垃圾进行清扫;当识别垃圾为易拉罐、塑料瓶、玻璃瓶等可回收垃圾时,将启 动所述智能机械手进行捡拾。
63.尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运 用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地 实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限 于特定的细节和这里示出与描述的图例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。