1.本发明涉及壁面清洗机器人领域,尤其是一种双吸附式多方向移动可越障壁面清洗机器人。
背景技术:
2.目前,建筑物的玻璃幕墙主要依靠人工方式进行清洗,这种高空作业不仅耗费大量人力物力,而且危险性极高,若突遇不确定因素干扰,极易危害清洗工人的人身安全。为此,各类高层玻璃幕墙清洗机器人应用而生,用于替代人工完成清洗作业。现阶段大多数高层玻璃幕墙清洗机器人采用磁力吸附、真空负压吸附、机械硬接触等方式进行壁面吸附,但普遍存在吸附力小、越障能力弱、工作效率低且续航时间短的问题。例如,专利cn202010288782.9提出了一种在玻璃壁面移动的机器人,借助吸盘吸附在玻璃上,并通过移动机构交互动作在玻璃壁面上移动,但存在移动缓慢、变向迟钝、越障能力若、工作空间有限等不足。因此,开发一款移动速度快、越障能力强、续航时间长的玻璃幕墙清洗机器人具有重要意义。
技术实现要素:
3.针对现有技术中存在的问题,本发明提出一种双吸附式多方向移动可越障壁面清洗机器人,具有移动速度快、变向灵活、吸附力大、越障能力强、工作效率高且续航时间长的特点,可以实现对复杂立面建筑壁面的清洗。
4.本发明内容具体如下:一种双吸附式多方向移动可越障壁面清洗机器人,包括机架、越障三角轮、负压吸附装置、旋翼推力装置、供水供电装置及立面清洗装置。机架为长方体棱边结构,越障三角轮均布安装在底面四个顶角,负压吸附装置和旋翼推力装置分别安装在底面和顶面,立面清洗装置安装在底面四条棱边上。
5.机架是由十二根碳纤维管连接成的一个长方体棱边结构,机架上设置有越障三角轮、负压吸附装置、旋翼推力装置、供水供电装置及立面清洗装置。机架的内侧表面设置有玻璃透明度传感器与压力传感器。
6.越障三角轮包括履带三角轮、履带三角轮轴、减速电机、扭矩舵机、电机座以及越障三角轮连接座;履带三角轮由动力传输带、履带、主动轴以及轮边从动轴组成,履带三角轮轴一端与履带三角轮连接,另一端与减速电机连接,减速电机安装在电机座上,扭矩舵机连接电机座带动履带三角轮实现一百八十度范围旋转,减速电机与大扭矩舵机均由供电装置供电,越障三角轮在机器人底部四个顶角各有一个。
7.负压吸附装置包括涡轮、无刷电机、无刷电机座、负压缸体以及双向电调,无刷电机座安装在负压缸体底侧,所述无刷电机固定在无刷电机座上,所述涡轮安装在无刷电机的电机轴上,无刷电机的控制端与双向电调连接,无刷电机及双向电调均由供电装置供电,负压吸附装置在机器人底部前后各有一个。
8.旋翼推力装置包括螺旋桨、无刷电机,无刷电机座、扭矩舵机、旋翼底盘以及双向
电调,无刷电机座安装在旋翼底盘,所述无刷电机固定在无刷电机座上,所述螺旋桨安装在无刷电机的电机轴上,无刷电机的控制端与双向电调连接,扭矩舵机舵机轴与旋翼底盘连接,控制旋翼推力装置的角度调节,无刷电机以及扭矩舵机均由供电装置供电。
9.供水供电装置包括水箱、水电输送管、供水供电管安装座以及水电管分支箱。水箱安装在建筑物顶侧,水电输送管一端与水箱相连,另一端与供水供电管安装座相连,供水供电管安装座安装在水电管分支箱上,水电输送管从左到右的三根管依次是供水管、回水管和电线管。
10.立面清洗装置包括五根清洗轴毛刷,两个减速电机、清洗刷底座以及减速电机座。减速电机通过动力输出带动主动轴转动,主动轴通过万向节连接带动从动轴,五根清洗轴两端均安装有轴承座,轴承座安装在立面清洗装置安装座上,通过五根清洗轴毛刷转动进行清洗。立面清洗装置第一从动轴左侧与供水管相连,尾侧与回水管相连,立面清洗装置安装座与机架通过立面清洗装置连接架连接。前侧从动清洗轴毛刷内轴为管件,管件右侧未导通,管件左侧导通,管件表面有许多均匀小孔;前、左以及右侧清洗轴为一组,左侧清洗轴为主动轴,前侧和右侧为从动轴,中间通过万向节连接;后侧对称两根清洗轴为一组,右后侧清洗轴为主动轴,左后侧清洗轴为主动轴,中间通过万向节连接;减速电机均由供电装置供电。
11.本发明相对现有技术具有如下优点:1、采用旋翼吸附和负压吸附两种组合式吸附方式,提供可靠的吸附力;2、采用履带三角轮为移动装置,履带和整体均可以转动,有优越的越障能力;3、选用碳纤维管设计机架结构,保证强度刚度,降低总体重量;4、机架底面设计四个扭矩舵机,实现机器人在壁面的多方位移动,变向灵活;5、设计立面清洗装置,实现废水的回收,在工作时通过摩擦抵消部分重力。
附图说明
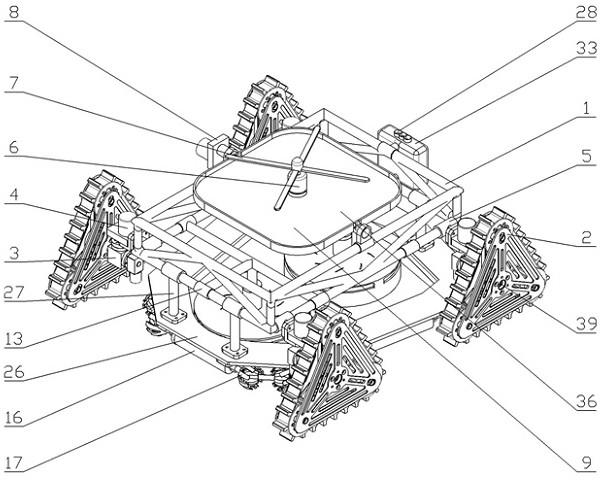
12.图1为该发明的斜视图。
13.图2为该发明的俯视图。
14.图3为该发明的仰视图。
15.图4为该发明的立面清洗装置图。
16.图5为该发明的双吸附爬壁装置图。
17.图6为该发明工作时的状态图。
18.图中,1—机架,2—越障三角轮,3—第一减速电机,4—第一扭矩舵机,5—越障三角轮安装座,6—旋翼无刷电机,7—旋翼叶片,8—第二扭矩舵机,9—旋翼安装座,10—涡轮叶片,11—涡轮无刷电机,12—负压缸体,13—负压吸附机构安装座,14—第一主动轴,15—第一万向节,16—第一从动轴,17—第二万向节,18—第二从动轴,19—第二主动轴,20—第三万向节,21—第三从动轴,22—第二减速电机,23—第三减速电机,24—第一轴承座,25—第二轴承座,26—立面清洗装置安装座,27—立面清洗装置连接架,28—供水供电管安装座,29—玻璃透明度传感器,30—压力传感器,31—玻璃幕墙,32—供电供水装置,33—水电管分支箱,34—电线管,35—负压吸附装置,36—旋翼推力装置,37—立面清洗装置,38—履带三角轮,39—履带三角轮轴,40—水箱,41—清洗机器人,42—供水管,43—回水管。
19.说明:越障三角轮、负压吸附装置、旋翼推力装置、供水供电装置及立面清洗装置
均采用单片机进行控制;该发明所涉及供水供电装置内部构造及控制电路省略。
具体实施方式
20.如图1、图2、图3和图6所示,一种双吸附式多方向移动可越障壁面清洗机器人,包括机架1、越障三角轮2、负压吸附装置35、旋翼推力装置36、供水供电装置32及立面清洗装置37。所述机架1为长方体棱边结构,所述越障三角轮2数量为四个,四个越障三角轮2均布安装在机架1底面四个顶角,所述负压吸附装置35和旋翼推力装置36分别安装在机架1的底面和顶面,所述立面清洗装置37安装在机架1底面四条棱边上;所述机架1上设置有供水供电管安装座28、水电管分支箱33、立面清洗装置安装座26和负压吸附机构安装座13;越障三角轮2、负压吸附装置35、旋翼推力装置36、供水供电装置32及立面清洗装置37均采用单片机进行控制。
21.如图1、图2和图6所示,越障三角轮2包括履带三角轮38、第一减速电机3、第一扭矩舵机4以及越障三角轮安装座5。履带三角轮轴39一端与履带三角轮38连接,另一端与第一减速电机3连接,所述第一扭矩舵机4连接第一减速电机3带动履带三角轮38实现一百八十度范围旋转,使清洗机器人41可以在立面内进行上、下、左、右,右上、右下、左上、左下八个方向的移动;第一减速电机3与第一扭矩舵机4均由供水供电装置32供电。
22.如图3、图5和图6所示,负压吸附装置35包括涡轮叶片10、涡轮无刷电机11以及负压缸体12。涡轮无刷电机11安装在负压缸体底侧12,所述涡轮叶片10安装在涡轮无刷电机11的电机轴上,负压缸体12安装在负压吸附机构安装座13上,负压吸附机构安装座13与机架1连接,涡轮无刷电机11由供水供电装置32供电。
23.图5和图6所示,旋翼推力装置36包括旋翼叶片7、旋翼无刷电机6、第二扭矩舵机8以及旋翼机构安装座9,旋翼无刷电机6安装在旋翼机构安装座9,所述旋翼叶片7安装在旋翼无刷电机6的电机轴上,第二扭矩舵机8舵机轴与旋翼机构安装座9连接,控制旋翼推力装置36的角度调节,旋翼无刷电机6和第二扭矩舵机8均由供水供电装置32供电。
24.如图1和图6所示,供水供电装置32包括水箱40、供水供电管安装座28以及水电管分支箱33。水箱40安装在建筑物顶侧,供水供电管安装座28安装在水电管分支箱33上,水电输送管从左到右的三根管依次是供水管42、回水管43和电线管34。
25.如图1、图4和图6所示,立面清洗装置37包括第一主动轴14,第一万向节15,第一从动轴16,第二万向节17,第二从动轴18,第二主动轴19,第三万向节20,第三从动轴21,第二减速电机22,第三减速电机23,第一轴承座24,第二轴承座25;第二减速电机22通过动力输出带动第一主动轴14转动,第一主动轴14通过与第一万向节15连接带动第一从动轴16,第一从动轴16通过与第二万向节17连接带动第二从动轴18;第三减速电机23通过动力输出带动第二主动轴19转动,第二主动轴19通过与第三万向节20连接带动第三从动轴21;第一从动轴16两侧安装第一轴承座24和第二轴承座25;五根清洗轴两端均安装有轴承座,轴承座安装在立面清洗装置安装座26上,通过五根清洗轴毛刷转动对玻璃幕墙31进行清洗;立面清洗装置37的第一从动轴16左侧与供水管42相连,尾侧与回水管43相连,立面清洗装置安装座26与机架1通过立面清洗装置连接架27相连。第一从动轴16清洗轴毛刷内轴为管件,管件右侧未导通,左侧导通,管件表面有许多均匀小孔;第一从动轴16清洗轴上左侧安装玻璃透明度传感器29和压力传感器30;第一主动轴14、第一万向节15、第一从动轴16、第二万向
节17、以及第二从动轴18为一组;第二主动轴19,第三万向节20,第三从动轴20为一组。
26.本发明的一次工作过程如下:a. 将水箱40放置在建筑物楼顶,将水电输送管一端连接在水箱40上,另外一端连接供水供电管安装座28处,供水供电装置32可以对水电输送管的长度进行调节。当清洗机器人41被放置在起始位置后,开始对玻璃幕墙31开始清洗。
27.b. 负压吸附装置35启动,通过涡轮无刷电机11带动涡轮叶片10高速旋转,将负压缸体12中的气体抽出,负压缸体12处于一个负压状态,负压吸附装置共有两套负压吸附缸体,安装在机架1的前后两侧,在大气压强作用下,使清洗机器人41吸附在玻璃幕墙31上。
28.c. 供水供电装置32启动,通过水箱40内的清洗水吸入供水管42内经过水电管分支箱33输送至第一从动轴16的毛刷管内,清洗水从毛刷管内的小孔内润湿到第一从动轴16的毛刷管外侧;尾侧的污水吸入回水管43内回收到水箱40。
29.d. 立面清洗装置37启动,第二减速电机22带动第一主动轴14向外侧转动,第一主动轴14通过第一万向节15带动第一从动轴16转动,第一从动轴16通过第二万向节17带动第二从动轴18转动;第三减速电机23带动第二主动轴19向内侧转动,第二主动轴19通过第三万向节20带动第三从动轴21转动。至此,五根清洗轴都开始向前侧转动,五根清洗轴两端均安装有轴承,轴承座安装在立面清洗装置安装座26上,通过五根清洗轴毛刷转动进行清洗;在第一从动轴16安装了玻璃透明度传感器29和压力传感器30,单片机通过玻璃透明度传感器29和压力传感器30检测清洗刷是否达到合适压力值和透明度,确保清洗玻璃达到标准要求。
30.e. 越障三角轮2启动,所述越障三角轮2包括履带三角轮38、第一减速电机3、第一扭矩舵机4以及越障三角轮安装座5各四个,安装在在机架1底面四个顶角;越障三角轮2可以移动到玻璃幕墙31的任何位置,由于四个越障三角轮2的运动状态和工作原理一致,所以下面描述运动状态和工作原理时,对左上侧的越障三角轮2进行描述。清洗机器人41向上移动时,单片机控制第一减速电机3向前转动,第一扭矩舵机4偏转角度为零度;清洗机器人41向下移动时,单片机控制第一减速电机3向后转动,第一扭矩舵机4偏转角度为零度;清洗机器人41向右移动时,单片机控制第一减速电机3向前转动,第一扭矩舵机4偏转角度为九十度;清洗机器人41向左移动时,单片机控制第一减速电机3向后转动,第一扭矩舵机4偏转角度为九十度;清洗机器人41向右上移动时,单片机控制第一减速电机3向前转动,第一扭矩舵机4偏转角度为四十五度;清洗机器人41向左上移动时,单片机控制第一减速电机3向前转动,第一扭矩舵机4偏转角度为负四十五度;清洗机器人41向右下移动时,单片机控制第一减速电机3向后转动,第一扭矩舵机4偏转角度为负四十五度;清洗机器人41向左下移动时,单片机控制第一减速电机3向后转动,第一扭矩舵机4偏转角度为四十五度。其他三个越障三角轮2工作原理以此类推。在此立面移动过程中,履带三角轮38外侧三角履带传动。
31.f. 在移动过程中,越障三角轮2碰到前方障碍物,履带会卡在障碍物上,履带停止转动,越障三角轮2整体转动,越过障碍物,在此越障过程中,由于清洗机器人41爬上障碍物会造成清洗机器人41重心升高,会造成负压吸附装置35吸附力不足,此时旋翼推力装置36启动,旋翼无刷电机6带动旋翼叶片7高速转动,在旋翼叶片7的作用下提供足够的推力给旋翼机构安装座9,旋翼机构底盘9安装在机架1上,将推力传递给清洗机器人41;通过第二扭矩舵机8调节旋翼推力装置36的角度,第二扭矩舵机8舵机轴连接旋翼机构安装座9的调节轴,通过第二扭矩舵机8调节旋翼推力装置36的推力方向,保证清洗机器人41在越障过程中
爬壁的稳定性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
