1.本发明涉及服装支撑技术领域,特别涉及一种自动快速三维支模装置及支 模方法。
背景技术:
2.支模是一下人类历史久远的生产工作内容,设涉及各行各业。因为模型精 细化要求不一,因性价比等因素,自动化支模技术发展相对滞后。
3.随着社会的不断发展,衣服的种类越来越多,好的衣服都需要人体模型来 对衣服支撑来进行展示。
4.在人体试衣,模具制作方面,呈现和使用物体外形只是短暂过程,为此领 用3d打印构造模型,然而3d打印技术在制造模型时,只能根据设定好的模 型尺寸打印特定尺寸的模型,且其在打印模型中所需要的时间是十分长的,且 需要利用大量材料,成本较高。
5.由于,3d打印的支撑模型其尺寸是定型的,只能在支撑相同尺寸衣服时, 针对不同尺寸的衣服,其并不能精确对目标模型形成支撑,因此,需要一种自 动快速三维支模装置及支模方法来解决上述问题。
技术实现要素:
6.本发明的目的是克服上述现有技术中存在的问题,提供一种自动快速三维 支模装置及支模方法,通过参照一个虚拟目标模型,建立一个原模型实体外形, 再通过原模型上大量伸缩结构伸长来实现与目标形态一致的外形,无需借助三 维实体打印技术,能快速且精确的对目标模型形成支撑。
7.本发明的技术方案是:
8.一种自动快速三维支模装置,包括:
9.原模型,设置在目标模型内,且原模型与目标模型同构设置,所述原模型 包括多个不同形状的封闭环和多个固定杆,多个固定杆沿目标模型的中心竖直 连接,每个固定杆通过支架连接一个封闭环,每两个相邻的封闭环连接;
10.多个伸缩结构,均布设置在每个对应的封闭环上,其固定端和封闭环连接, 每个伸缩结构的伸缩端穿过封闭环朝向目标模型;
11.还包括识别模块及控制模块,识别模块用于获取每个伸缩结构的杆头的中 心点与目标模型轮廓之间在杆头轴向上的距离;控制模块用于控制每个伸缩结 构根据识别模块获取的距离控制对应的伸缩结构进行伸缩。
12.优选地,所述识别模块为三维扫描模块,三维扫描模块用于对目标模型的 外形形状及多个伸缩结构的杆头进行扫描,获取目标模型外形轮廓的三维坐标 数据及多个伸缩结构的杆头的中心点的三维坐标数据。
13.优选地,控制模块用于根据三维扫描模块扫描的三维坐标数据,获取伸缩 结构的轴线与目标模型的交点周边的有限个空间点的三维坐标及杆头的中心 点的三维坐标;
14.用于根据有限个空间点的三维坐标建立一个平面或拟合一个曲面,计算杆 头的中心点与所述平面或曲面的轴向距离;
15.用于根据轴向距离控制伸缩结构进行伸长,对目标模型进行支撑。
16.优选地,所述原模型与目标模型的中心重合设置在目标模型内。
17.一种自动快速的三维支模装置的支模方法,包括以下步骤:
18.将目标模型视为多个大小不同的筒状体拼接而成;
19.扫描目标模型的外形形状,获取目标模型外形的三维坐标数据;
20.根据三维坐标数据测算出目标模型的一个几何中心,以目标模型的几何中 心为原点,对原模型的多个封闭环进行布置;
21.通过支架将多个固定杆和多个封闭环一一对应连接,沿原模型的几何中心 的竖直方向将多个固定杆连接,相邻的封闭环连接;
22.将每个伸缩结构的固定端固定在封闭环上,伸缩结构的伸缩端穿过封闭环 朝向目标模型设置;
23.获取每个伸缩结构的杆头中心点的三维坐标数据,根据目标模型外形的三 维坐标数据和每个伸缩结构的杆头的三维坐标数据计算每个伸缩结构的杆头 距目标模型的距离,根据所述距离控制每个对应的伸缩结构伸长,直至伸缩结 构的伸缩端顶到目标模型上,即完成自动支模过程。
24.优选地,对原模型的多个封闭环进行布置的步骤包括:
25.多个封闭环和目标模型的多个筒状体一一对应,且每个目标模型与原模型 之间的最大距离应小于原模型上固定的伸缩结构的最大伸长量;
26.沿目标模型的中心的竖直方向,将连接在每个封闭环上的固定杆从下往上 的依次通过人工或智能机械方式的组装成原模型。
27.优选地,还包括对伸缩结构或者封闭环调整的步骤,其包括:
28.对伸缩结构的杆头中心点进行扫描,获取伸缩结构的杆头中心点的三维坐 标;
29.根据伸缩结构的杆头中心点的三维坐标与其对应的目标模型的三维坐标 点进行比较,当两个三维坐标点重合,则不需要调整;当两个三维坐标点不重 合,则更换封闭环或者更换伸缩结构。
30.优选地,根据目标模型1外形的三维坐标数据和每个伸缩结构2的杆头的 三维坐标数据计算每个伸缩结构2的杆头距目标模型1的距离的步骤,其包括:
31.获取伸缩结构的轴线与目标模型的交点,对目标模型进行二次扫描,获取 所述交点周边的有限个空间点的三维坐标数据;
32.利用所述有限个空间点的三维坐标数据建立一个平面或拟合一个曲面,计 算每个伸缩结构杆头中心点与上述平面或曲面的轴向距离;
33.轴向距离即为每个伸缩结构需要伸长的距离。
34.与现有技术相比,本发明提供的一种自动快速三维支模装置及支模方法, 其有益效果是:
35.1、本发明结构简单,使用方便。
36.2、本发明通过计算每个伸缩结构的杆头距目标模型的距离,根据该距离 来精确控制每个伸缩结构的伸长量,从而使得每个伸缩结构对目标模型的内壁 进行支撑,完成自
动支模过程,从而使得伸缩结构的支撑位置及支撑长度的更 精确,提高了支撑效果,本装置的结构简单,实用性强,值得推广。
附图说明
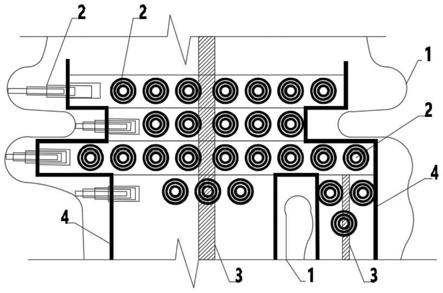
37.图1为本发明支模装置的主视方向的局部剖视图;
38.图2为本发明支模装置的俯视方向的剖视图;
39.图3为本发明支模方法的流程图。
具体实施方式
40.下面结合附图1到图3,对本发明的一个具体实施方式进行详细描述,但 应当理解本发明的保护范围并不受具体实施方式的限制。
41.如图1和图2所示,本发明提供的一种自动快速三维支模装置,包括:在 目标模型1内的设置原模型4,且原模型4与目标模型1同构设置,同构设置 即原模型4与目标模型1的外形状相同大小不同,原模型4包括多个不同形状 的封闭环和多个固定杆3,多个固定杆3沿目标模型1的中心竖直连接,每个 固定杆3通过支架连接一个封闭环,每两个相邻的封闭环连接;每个封闭环上 均布设置有多个伸缩结构2,伸缩结构2固定端和封闭环连接,每个伸缩结构 2的伸缩端穿过封闭环朝向目标模型1,其中,固定杆3为原模型4提供支撑, 沿固定杆3也能为原模型4封闭环上固定的伸缩结构2布置电线或者管路,来 给伸缩结构2提供控制信号,其中,伸缩结构2选用电动推杆或者液压杆。
42.还包括识别模块及控制模块,识别模块用于获取每个伸缩结构2的杆头的 中心点与目标模型1轮廓之间在杆头轴向上的距离;控制模块用于控制每个伸 缩结构2根据识别模块获取的距离控制对应的伸缩结构2进行伸缩,其中,所 有封闭环通过支架水平固定在固定杆上,且每个筒状体内的原模型内都设置一 个或多个固定杆,所有的固定杆相互连接,为各个原模型提供支撑力。每个封 闭环上面安装一定数量的伸缩结构2,每个伸缩结构2均通过控制模块控制其 的伸缩量。
43.其中,识别模块为三维扫描模块,三维扫描模块用于对目标模型1的外形 形状轮廓的三维坐标数据及多个伸缩结构2的杆头进行扫描,获取目标模型1 外形及多个伸缩结构2的杆头的中心点的三维坐标数据。
44.其中,控制模块用于根据三维扫描模块扫描的三维坐标数据,获取伸缩结 构2的轴线与目标模型1的交点周边的有限个空间点的三维坐标及杆头的中心 点的三维坐标;控制模块还用于根据有限个空间点的三维坐标建立一个平面或 拟合一个曲面,计算杆头的中心点与所述平面或曲面的轴向距离,轴向距离就 是原模型4对目标模型1形成支撑时所需的精确距离,即杆头应伸长的距离; 控制模块还用于根据轴向距离控制伸缩结构2进行伸长,对目标模型1进行支 撑。
45.其中,所述原模型4与目标模型1的中心重合设置在目标模型1内。
46.实施例1
47.本发明还提供一种自动快速的三维支模装置的支模方法,包括以下步骤: s1、将目标模型1视为多个大小不同的筒状体拼接而成;s2、扫描目标模型1 的外形形状,获取目标模型1外形的三维坐标数;s3、根据三维坐标数据测算 出目标模型1的一个几何中心,以
目标模型1的几何中心为原点,对原模型4 的多个封闭环进行布置;s4、通过支架将多个固定杆3和多个封闭环一一对应 连接,沿原模型4的几何中心的竖直方向将多个固定杆3连接,相邻的封闭环 连接;s5、将每个伸缩结构2的固定端固定在封闭环上,伸缩结构2的伸缩端 穿过封闭环朝向目标模型1设置;s6、获取每个伸缩结构2的杆头中心点的三 维坐标数据,根据目标模型1外形的三维坐标数据和每个伸缩结构2的杆头的 三维坐标数据计算每个伸缩结构2的杆头距目标模型1的距离,根据所述距离 控制每个对应的伸缩结构2伸长,直至伸缩结构2的伸缩端顶到目标模型1上, 即完成自动支模过程。
48.其中,s3中对原模型4的多个封闭环进行布置的步骤包括:s31、多个封 闭环和目标模型1的多个筒状体一一对应,且每个目标模型1与原模型4之间 的最大距离应小于原模型上固定的伸缩结构2的最大伸长量;s32、沿目标模 型1的中心的竖直方向,将连接在每个封闭环上的固定杆3从下往上的依次通 过人工或智能机械方式的组装成原模型4。
49.其中,s6中根据目标模型1外形的三维坐标数据和每个伸缩结构2的杆头 的三维坐标数据计算每个伸缩结构2的杆头距目标模型1的距离的步骤,包括: s61、获取伸缩结构2的轴线与目标模型1的交点,对目标模型1进行二次扫 描,获取所述交点周边的有限个空间点的三维坐标数据;s61、利用所述有限 个空间点的三维坐标数据建立一个平面或拟合一个曲面,计算每个伸缩结构2 杆头中心点与上述平面或曲面的轴向距离;轴向距离即为每个伸缩结构2需要 伸长的距离。
50.实施例2
51.在实施例1的基础上,本方法还包括对伸缩结构2或者封闭环调整的步骤, 其包括:对伸缩结构2的杆头中心点进行扫描,获取伸缩结构2的杆头中心点 的三维坐标;根据伸缩结构2的杆头中心点的三维坐标与其对应的目标模型1 的三维坐标点进行比较,当两个三维坐标点重合,则不需要调整;当两个三维 坐标点不重合,则更换封闭环或者更换伸缩结构2,即两个三维坐标点不重合 时,在保证伸缩结构2不变的情况下,更换一个直径更大的封闭环,或者在保 证封闭环直径不变的情况下,更换一个伸缩长度更长的伸缩结构2。
52.综上所述,与现有技术相比,本发明的一种自动快速三维支模装置及支模 方法,通过计算每个伸缩结构的杆头距目标模型的距离,根据该距离来精确控 制每个伸缩结构的伸长量,从而使得每个伸缩结构对目标模型的内壁进行支 撑,完成自动支模过程,从而使得伸缩结构的支撑位置及支撑长度的更精确, 提高了支撑效果,本装置的结构简单,实用性强,值得推广。
53.以上公开的仅为本发明的几个具体实施例,但是,本发明实施例并非局限 于此,任何本领域的技术人员能思之的变化都应落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
