一种基于dtw步态差异的多节点跌倒预警方法及系统
技术领域
1.本发明涉及跌倒检测领域,特别是涉及一种基于dtw步态差异的多节点跌倒预警方法及系统。
背景技术:
2.目前各国都面临人口老龄化严重的问题,随着年龄的增加老人的身体机能急剧下降,随时会有跌倒的危险。老人一旦发生跌倒,无论是在生理上还是心理上,都将承受巨大的伤害,跌倒已经成为危害老人健康的大问题。据统计,跌倒引发的死亡已经成为我国65岁以上的老人的首位伤害死因。所以预防和控制老人跌倒已经成为迫切问题。目前针对老人跌倒检测方案可根据数据采集方式不同分为基于外部环境信息的跌倒检测,基于视频的跌倒检测和基于可穿戴式的跌倒检测。前两种方案因为布设传感器的价格较高且使用范围受限因此不便于推广,而基于可穿戴式的数据采集方式不仅价格较低且穿戴的方式对其使用范围的限制较小,所以采用此种进行数据的采集。而可穿戴式也有多点和单点穿戴之分,目前常见的可穿戴设备多为单点穿戴,此种方式导致了其不能完整的采集老人的跌倒数据,所以只能在跌倒之后对人体进行检测,并没有跌倒前预警的功能。目前少量已经公开的可穿戴式跌倒预警器,其所使用的判别方法主要还是较为简单的阈值法,且仅采集腰部一点的数据,所以导致其预警的准确率不高。
3.还有在老人的腰部位置穿戴带有气囊的数据采集设备,实时采集多个采样点的被监测对象的三轴加速度信息、三轴角速度信息和三轴地磁场信息;根据三轴加速度信息计算被监测对象在各采样点的合加速度;根据各采样点的所述三轴加速度信息、三轴角速度信息和三轴地磁场信息生成欧拉角差值序列;根据各采样点的合加速度及预设的合加速度阈值判断被监测对象的运动状态是否为疑似跌倒状态;如果是,根据由所有采样点的合加速度得到的合加速度均值及预设的合加速度均值阈值,结合所述欧拉角差值序列及预设的欧拉角差值阈值判断被监测对象是否有跌倒倾向;在被监测对象有跌倒倾向时生成报警信息,以在被监测对象跌倒前进行报警。
4.现在技术中存在以下缺陷:
5.1.单点的数据采集,因为人体重心在腰部,所以常见的跌倒检测都是采集人体腰部的运动数据,但腰部的单点数据并不能完整的描述人体的跌倒动作,且无法完整采集人体的步态信息。
6.2.目前常见的老人跌倒监护产品多为老人跌倒后检测,此功能并不能阻止或预防跌倒的发生,人体依旧会承受跌倒所带来的伤害。
7.3.目前少量已公开的可穿戴式跌倒预警器,检测算法较为简单主要是依靠阈值法做判断,且所用的都是单点穿戴的方式,所采集的数据量较小且算法过于简单,导致其预警的准确率较低。
技术实现要素:
8.本发明的目的是提供一种基于dtw步态差异的多节点跌倒预警方法及系统,以实现在行走不稳时进行准确预警从而避免发生跌倒。
9.为实现上述目的,本发明提供了如下方案:
10.一种基于dtw步态差异的多节点跌倒预警方法,包括:
11.获取多个采集点的加速度数据;所述采集点包括腰部及脚踝;所述脚踝包括左脚踝和右脚踝;
12.根据所述加速度数据确定采集点的合加速度;
13.根据所述腰部的合加速度利用dtw算法确定稳定系数;
14.根据所述脚踝的合加速度利用dtw算法确定平衡系数;
15.根据所述稳定系数和所述平衡系数利用knn算法确定是否发出跌倒预警。
16.可选的,所述根据所述加速度数据确定采集点的合加速度,具体包括:
17.根据所述加速度数据利用动态时间窗法进行步态周期分割,得到分割后的加速度数据;
18.根据所述分割后的加速度数据确定采集点的合加速度。
19.可选的,所述根据所述腰部的合加速度利用dtw算法确定稳定系数,具体包括:
20.获取当前步态周期的时间序列和上一步态周期的时间序列;所述当前步态周期的时间序列为当前步态周期的所述腰部的合加速度组成的时间序列;所述上一步态周期的时间序列为上一步态周期的所述腰部的合加速度组成的时间序列;
21.根据所述当前步态周期的时间序列和所述上一步态周期的时间序列利用dtw算法确定稳定系数。
22.可选的,所述稳定系数的计算公式为:
23.stability=dtw(ws
i
‑1,ws
i
)
24.其中,stability为稳定系数,ws
i
‑1为上一步态周期的时间序列,ws
i
为当前步态周期的时间序列。
25.可选的,所述根据所述脚踝的合加速度利用dtw算法确定平衡系数,具体包括:
26.根据所述左脚踝的合加速度组成左脚踝时间序列;
27.根据所述右脚踝的合加速度组成右脚踝时间序列;
28.根据所述左脚踝时间序列和所述右脚踝时间序列利用dtw算法确定平衡系数。
29.可选的,所述平衡系数的计算公式为:
30.balance=dtw(las,ras)
31.其中,balance为平衡系数,las为左脚踝时间序列,ras为右脚踝时间序列。
32.可选的,所述根据所述稳定系数和所述平衡系数利用knn算法确定是否发出跌倒预警,具体包括:
33.计算新系数与训练集的欧氏距离;所述新系数包括所述稳定系数和所述平衡系数;所述训练集包括正常步态的稳定系数、正常步态的平衡系数、异常步态的稳定系数和异常步态的平衡系数;
34.获取所述欧式距离中设定阈值的所述训练集的训练样本;
35.判断所述训练样本中为异常步态的频率是否小于正常步态的频率,得到第一判断
结果;
36.若所述第一判断结果表示所述训练样本中为异常步态的频率大于或者等于正常步态的频率,则确定发出跌倒预警。
37.一种基于dtw步态差异的多节点跌倒预警系统,包括:
38.获取模块,用于获取多个采集点的加速度数据;所述采集点包括腰部及脚踝;所述脚踝包括左脚踝和右脚踝;
39.采集点合加速度确定模块,用于根据所述加速度数据确定采集点的合加速度;
40.稳定系数确定模块,用于根据所述腰部的合加速度利用dtw算法确定稳定系数;
41.平衡系数确定模块,用于根据所述脚踝的合加速度利用dtw算法确定平衡系数;
42.跌倒预警模块,用于根据所述稳定系数和所述平衡系数利用knn算法确定是否发出跌倒预警。
43.可选的,所述采集点合加速度确定模块,具体包括:
44.分割单元,用于根据所述加速度数据利用动态时间窗法进行步态周期分割,得到分割后的加速度数据;
45.采集点合加速度确定单元,用于根据所述分割后的加速度数据确定采集点的合加速度。
46.根据本发明提供的具体实施例,本发明公开了以下技术效果:
47.本发明提供了一种基于dtw步态差异的多节点跌倒预警方法及系统,通过利用dtw算法,根据腰部的合加速度确定稳定系数,根据脚踝的合加速度确定平衡系数,再根据平衡系数和稳定系数利用knn算法进行判别,确定是否发生行走不稳的情况,进而确定是否发出跌倒预警,通过采用多个采集点,利用dtw算法和knn算法提高预警的准确性。
附图说明
48.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
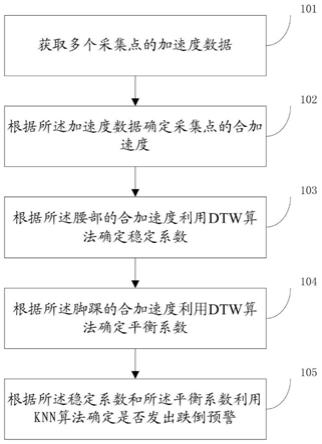
49.图1为本发明提供的一种基于dtw步态差异的多节点跌倒预警方法流程图;
50.图2为人体三维运动模型示意图;
51.图3为正常步态三点数据示意图;
52.图4为踉跄步态三点数据示意图;
53.图5为正常行走数据图;
54.图6为正常行走平衡及稳定系数;
55.图7为行走不稳数据图;
56.图8为行走不稳的平衡及稳定系数;
57.图9为跌倒预警算法流程图;
58.图10为人体数据采集三点图;
59.图11为本发明提供的一种基于dtw步态差异的多节点跌倒预警系统示意图。
具体实施方式
60.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
61.本发明的目的是提供一种基于dtw步态差异的多节点跌倒预警方法及系统,以实现在行走不稳时进行准确预警从而避免发生跌倒。
62.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
63.如图1所示,本发明提供的一种基于dtw步态差异的多节点跌倒预警方法,包括:
64.步骤101:获取多个采集点的加速度数据;所述采集点包括腰部及脚踝;所述脚踝包括左脚踝和右脚踝。
65.步骤102:根据所述加速度数据确定采集点的合加速度。步骤102,具体包括:根据所述加速度数据利用动态时间窗法进行步态周期分割,得到分割后的加速度数据;根据所述分割后的加速度数据确定采集点的合加速度。
66.步骤103:根据所述腰部的合加速度利用dtw算法确定稳定系数。步骤103,具体包括:获取当前步态周期的时间序列和上一步态周期的时间序列;所述当前步态周期的时间序列为当前步态周期的所述腰部的合加速度组成的时间序列;所述上一步态周期的时间序列为上一步态周期的所述腰部的合加速度组成的时间序列;根据所述当前步态周期的时间序列和所述上一步态周期的时间序列利用dtw算法确定稳定系数。
67.其中,所述稳定系数的计算公式为:
68.stability=dtw(ws
i
‑1,ws
i
)
69.其中,stability为稳定系数,ws
i
‑1为上一步态周期的时间序列,ws
i
为当前步态周期的时间序列。
70.步骤104:根据所述脚踝的合加速度利用dtw算法确定平衡系数。步骤104,具体包括:
71.根据所述左脚踝的合加速度组成左脚踝时间序列。
72.根据所述右脚踝的合加速度组成右脚踝时间序列。
73.根据所述左脚踝时间序列和所述右脚踝时间序列利用dtw算法确定平衡系数。
74.其中,所述平衡系数的计算公式为:
75.balance=dtw(las,ras)
76.其中,balance为平衡系数,las为左脚踝时间序列,ras为右脚踝时间序列。
77.步骤105:根据所述稳定系数和所述平衡系数利用knn算法确定是否发出跌倒预警。
78.步骤105,具体包括:
79.计算新系数与训练集的欧氏距离;所述新系数包括所述稳定系数和所述平衡系数;所述训练集包括正常步态的稳定系数、正常步态的平衡系数、异常步态的稳定系数和异常步态的平衡系数。
80.获取所述欧式距离中设定阈值的所述训练集的训练样本。
81.判断所述训练样本中为异常步态的频率是否小于正常步态的频率,得到第一判断结果。
82.若所述第一判断结果表示所述训练样本中为异常步态的频率大于或者等于正常步态的频率,则确定发出跌倒预警。
83.本发明结合多点可穿戴设备,旨在为老人提供一种跌倒前预警的方法,在实际应用中方法包括:
84.1.在老人身上腰部和双脚踝三点设置三个加速度传感器,在老人行走时采集这三点的加速度数据。如图2所示,以人体上的三个采集点中的任意一个作为中心,建立三维模型,人体前方为x轴,左方为y轴,竖直为z轴。合加速度可由这三个正交的x、y、z上的向量合成。
85.2.三点数据采集后,采用动态时间窗的方法,将加速度数据按照完整的步态周期进行分割处理,然后计算每个点位的合加速度,计算方法如式1所示,式中a
x
,a
y
,a
z
分别为x、y、z三轴方向上的加速度,s为合加速度。
[0086][0087]
3.因为人体跌倒与步态有着紧密的关联,步态是人体的结构,各个部位功能,运动调节系统的外在表现。人的四肢躯干等部位的病变和人体的神经调节系统失衡或者某些全身性的疾病都会影响一个人的步态。老人在发生跌倒之前身体的平衡被打破,会出现不稳定的状态,步态也会出现异常。因此通过对正常步态的分析区分正常步态与异常步态,从而判断老人是否即将要发生跌倒。正常步态与踉跄步态的三点合加速度数据图如图3
‑
4所示。
[0088]
如图3所示一个正常步态周期内,在行走时人体的左右呈现对称,左右脚的加速度数据相似。两个相邻周期的腰部加速度数据也会呈现相似的情况。如图4当老人在跌倒之前行走出现不稳的时候,人体的平衡性和稳定性都会出现异常,人体的步态数据周期性也会随之减弱,若反应在数据上则可发现加速度的幅值变化比较剧烈,同一个周期内左右脚的数据相似度与相邻的两个周期腰部加速度数据的相似度都会出现异常及相似程度变低。
[0089]
于是采用人体平衡系数与稳定系数用于描述老人步态的平衡性,采用dtw算法计算老人相邻两个步态周期的腰间合加速度数据差异作为稳定系数,计算对比一个步态周期内的左右两步脚踝处的合加速度数据差异作为平衡系数。通过计算得到的平衡系数与稳定系数描述老人身体的平衡性及稳定性,对老人是否即将发生跌倒进行预警。
[0090]
dtw算法是一种计算两个时间序列相似程度的动态规划算法,其可以应用在两个长度不一的时间序列相似程度计算。该算法主要应用在孤立词识别方面,人们在说话的时候发音不可能是相同的。因为每个人音色,频率的不同就会导致不同的人在说同一个单词的时候都是不相同的,比如一个人发出的a字母声音比较短促,另一个人发出a字母的声音尾声拖得比较长。这就造成了两段数据对应点的不同,若是使用欧氏距离计算,会造成很大的误差。
[0091]
尽管人类在正常行走时身体左右是呈现对称的,但是除了机器人以外没人可以走出相同的两步。这就导致在对比老人行走数据时两个步态数据的长度是不一样的,正常的行走产生的数据因为差距不大,可以进行修正对比。当出现异常步态时,对比的两组时间数据的长度就会变得不可控,如果进行强制修正就可能会丢失大量的有效信息导致结果不准
确。dtw在做语音识别时,是对比两段长度不同时间序列的相似程度,若比较相似则判定为同一发音。老人在行走时所产生的步态数据就如同说话时产生的语音数据,其序列长度也是不可控的。因需要对比老人步态数据的相似程度,所以将dtw算法迁移至本发明中,将其处理语音识别的思路用于处理老人的步态数据。
[0092]
dtw基于动态规划(dynamic programming,dp)的思想,当遇到两条长度不一的数据分别为q和c时,其长度分别n和m,就需要对这两个序列进行处理。根据序列长度构造一个n*m的矩阵网格w,矩阵元素w表示时序列种两点q
i
和c
j
之间的距离d(q
i
,c
j
),如式(2):
[0093]
d(q
i
,c
j
)=|q
i
‑
c
j
|
ꢀꢀꢀ
(2)
[0094]
dp算法会在矩阵网格中寻找到一条最优的通路,通路上的点就是两个序列所要对齐的点,但是在寻找路径的过程中,必须满足一些约束条件:
[0095]
1、边界条件:起点必须是w(1,1),终点必须是w(n,m)。
[0096]
2、连续性:如果存在w
k
‑1(a
′
,b
′
),那么其路径的下一个点w
k
(a,b)必须满足式(3),其中(a
′
,b
′
)为矩阵网格w中上一个点的坐标,(a,b)为矩阵网格w中下一点的坐标。
[0097][0098]
3、单调性:如果存在w
k
‑1(a
′
,b
′
),那么路径的下一个点w
k
(a,b)必须满足式(4),这就确保再寻找最优路线的过程中,必须向下寻找:
[0099][0100]
基于上述三个条件寻找到一条路径w
*
满足式(5):
[0101][0102]
其中,w
k
为矩阵w中元素,k为最优路线所经过的点数。
[0103]
根据路径w
*
可构建一个新的n*m的矩阵d它满足动态规划方程如式(6):
[0104]
d(i,j)=d(q
i
,c
j
) min(d(i
‑
1,j
‑
1),d(i
‑
1,j),d(i,j
‑
1))
ꢀꢀꢀ
(6)
[0105]
其中,d(i,j)为新构建的矩阵d中的元素,d(i
‑
1,j
‑
1)为d(i,j)在矩阵中对角线的上一个元素,d(i
‑
1,j)为d(i,j)在矩阵中左侧元素,d(i,j
‑
1)为d(i,j)在矩阵下方元素。
[0106]
其初始状态为式(7):
[0107][0108]
d(n,m)便表示q和c两个序列的相似程度,可用dtw(q,c)表示,数值越小表示两个序列的相似程度越近。
[0109]
平衡系数与稳定系数计算方法如下:
[0110]
stability=dtw(ws
i
‑1,ws
i
)
ꢀꢀꢀ
(8)
[0111]
式(8)中的stability则为稳定系数用于描述人体步态的稳定性,ws
i
‑1是腰间上一个步态周期的合加速度数据所组成的时间序列,式中ws
i
是腰间这一个步态周期的合加速
度数据所组成的时间序列。使用上述所介绍的dtw算法计算ws
i
‑1与ws
i
的差异性作为稳定系数stability。计算过程为:首先通过ws
i
‑1与ws
i
构建所需的矩阵网格w,然后根据式(3)(4)(5)作为约束条件在矩阵网格中寻找到一条最优的通路w
*
,最后根据路径w
*
以及约束条件(6)(7)构建出新的矩阵d,其中矩阵d中的d(max,max)元素则为所求的稳定系数stability。其中系数数值越大则表示差异性越大。
[0112]
balance=dtw(las,ras)
ꢀꢀꢀ
(9)
[0113]
式(9)中balance为平衡系数用于描述人体步态的平衡性,las指的是左脚踝的合加速度数据所组成的时间序列,式中ras指的是右脚踝的合加速度数据所组成的时间序列,其计算过程与稳定系数计算过程相同。其中系数数值越大则表示差异性越大。如图5
‑
8所示,分别为正常行走与行走不稳的三点合加速度数据,以及其所对应的实时平衡系数与稳定系数计算值。
[0114]
图5为人体正常行走的三点合速度数据,每个步态周期的左右脚踝合加速度数据较为相似,且相邻的两个步态周期的腰部合加速度数据也较为相似,所以计算得到的平衡及稳定系数数值较小,如图6所示。图7为跌倒前的异常步态数据,其每个步态周期的左右脚踝合加速度以及相邻的两个步态周期的腰部合加速度数据差异性较大,且每个步态周期的时间长度也有较大的差异,所以其平衡及稳定系数数值较大,其值如图8所示,表示人体步态出现异常。
[0115]
4.在计算得到平衡与稳定系数后,为了根据每个老人不同的身体情况制定更加适合的判决方法,采用knn算法,对计算的系数数据进行分类判决。如图9所示,可将过程可分为以下几个步骤:
[0116]
step1:分别选取十组正常步态的平衡与稳定系数和十组异常步态的平衡与稳定系数,将这二十组数据作为训练数据,初始化训练集。
[0117]
step2:当老人在行走时将产生新的系数数据带入计算数据与训练集样本的欧氏距离,其中欧式距离计算方法如下式(10)所示:
[0118][0119]
其中d
xy
为新的系数x与训练集中的样本y的欧氏距离,因为每组系数数据包括平衡系数1,平衡系数2,稳定系数,所以每组新的系数表示为向量x=(x1,x2,x3),训练集内的每个训练样本可表示为向量y=(y1,y2,y3)。所以式(10)中k则为下标,n为3。
[0120]
step3:选取距离最小的前k=5个训练样本,统计其在正常与异常步态类别中的频率。
[0121]
step4:返回频率最大的类别,若异常步态占多数则判定为快要发生跌倒,发出警报提醒老人予以注意缓步等以尽量避免或预防跌倒。
[0122]
本发明采集人体身上腰部和双脚踝处三个点位的三轴加速度数据,并计算得到每点的合加速度,然后将三点合加速度数据按照完整的步态周期,用动态时间窗法进行分割处理得到若干组数据;针对组数据,使用dtw算法实时计算两个步态周期的腰部合加速度数据的差异作为人体稳定系数,计算一个步态周期中左右脚的合加速度数据差异作为人体平衡系数,用上述两个系数分别描述老人身体的平衡性及稳定性。然后采用knn算法对计算得到的平衡系数与稳定系数进行分类,判断人体是否已经出现跌倒先兆,若是则会发警报提
醒老人予以注意缓步等以尽量避免或预防跌倒的发生。
[0123]
多点的数据采集方式,相较于单点的数据采集更具有优势,因为人体运动的复杂性,导致单个点位的数据采集并不能完整的描述老人的动作。在分析运动数据过程发现,人体躯干和四肢最能反映人体步行的运动,且躯干部位及从颈部到胯部的运动数据基本相似,本发明只在躯干部位取一个腰部的点位采集数据,对在四肢处的采集数据分析可知,在上肢的肘关节的运动数据可以完全在手腕处的运动数据所表现出来,在下肢的膝关节运动数据也可以完全在脚踝处的运动数据所表现。而在日常生活中老人在行走时,自然的甩臂过程经常不会出现,因此在人体取三个点位用于完整的描述人体的步态过程,三个点位分别是腰部和双腿的脚踝处,如图10所示:
[0124]
目前大部分的老人监护产品都只提供了跌倒后检测的功能,这不能有效的使得老人避免或预防跌倒的发生,已经发生的跌倒同样会给老人的身体带来伤害,所以跌倒前预警的功能就尤为重要。且目前少量的以公开的跌倒预警器,其预警算法较为简单主要还是依靠阈值法做判断。
[0125]
本发明提出了一种使用平衡系数与稳定系数描述老人身体的平衡性及稳定性,并采用动态时间归整算法用于计算步态数据,在计算得到平衡与稳定系数之后使用knn算法实现分类。相较于仅使用简单的阈值法,本发明的算法无论是在识别的准确性以及误报率方面都更加优秀。
[0126]
为了验证方法在老人的步态出现异常后及时的发出警报的可行性,帮助老人减少跌倒的发生。做了以下实验:(1)老人正常行走;(2)老人发生行走不稳;(3)只使用腰部单一加速度传感器重复(1)(2)的实验,在实验(2)中出于老人安全考虑,邀请了4位青年模拟老人行走不稳的情况,分别对上述情况都做了10次实验,表1为实验结果数据表,实验结果数据如表1所示。
[0127]
表1实验结果数据表
[0128][0129]
如果只有腰部的单个点位就只能建立一个稳定系数,经过测试单个稳定系数的模型对于侧向跌倒前的异常步态的识别错误率将会有很大的增加。实验结果如表1所示。正常行走时由于步伐稳定所产生的步态周期数据较为相似,及所计算的稳定与平衡系数的数值较小,所以对此识别率为100%。而多节点系统可以准确的识别出老人步态异常正确率为95%,单点数据时正确率则明显有所降低仅为82.5%。所以在老人行走时当步态出现异常后多点的系统可以做到准确的发出预警。
[0130]
如图11所示,本发明提供的一种基于dtw步态差异的多节点跌倒预警系统,包括:
[0131]
获取模块1101,用于获取多个采集点的加速度数据;所述采集点包括腰部及脚踝;所述脚踝包括左脚踝和右脚踝。
[0132]
采集点合加速度确定模块1102,用于根据所述加速度数据确定采集点的合加速
度。其中,所述采集点合加速度确定模块1102,具体包括:分割单元,用于根据所述加速度数据利用动态时间窗法进行步态周期分割,得到分割后的加速度数据。采集点合加速度确定单元,用于根据所述分割后的加速度数据确定采集点的合加速度。
[0133]
稳定系数确定模块1103,用于根据所述腰部的合加速度利用dtw算法确定稳定系数。
[0134]
平衡系数确定模块1104,用于根据所述脚踝的合加速度利用dtw算法确定平衡系数。
[0135]
跌倒预警模块1105,用于根据所述稳定系数和所述平衡系数利用knn算法确定是否发出跌倒预警。
[0136]
本发明提出了一种使用动态时间归整(dynamic time warping,dtw)算法计算步态差异的多节点跌倒预警方法。该方法是针对传统的老人跌倒检测的滞后性使老人仍会受跌倒伤害的弊端,所设计的一种在老人出现步态不稳可能发生跌倒的先兆状态,通过一系列计算判定以实现在跌倒前对老人进行警示提醒,从而减少老人跌倒发生的提前跌倒预警方法。本发明采用多点穿戴的方式,在人体的腰部和双脚踝位置设置传感器,老人行走时加速度传感器会采集这三点的加速度数据并实时计算每个点的合加速度。在主控模块中使用dtw算法计算两个步态周期的腰部加速度数据的差异作为人体稳定系数,计算一个步态周期中左右脚的加速度数据差异作为人体平衡系数,用于描述人体是否即将发生非突发性跌倒,然后采用k
‑
最邻近法(k
‑
nearest neighbor,knn)算法实现判别功能进行跌倒预警,旨在实现当发现老人行走不稳时发出预警帮助老人尽量的避免跌倒的发生。
[0137]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0138]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

